


In questo articolo, la procedura guidata ci dirà come ha fatto un barista robotizzato controllato da uno smartphone.
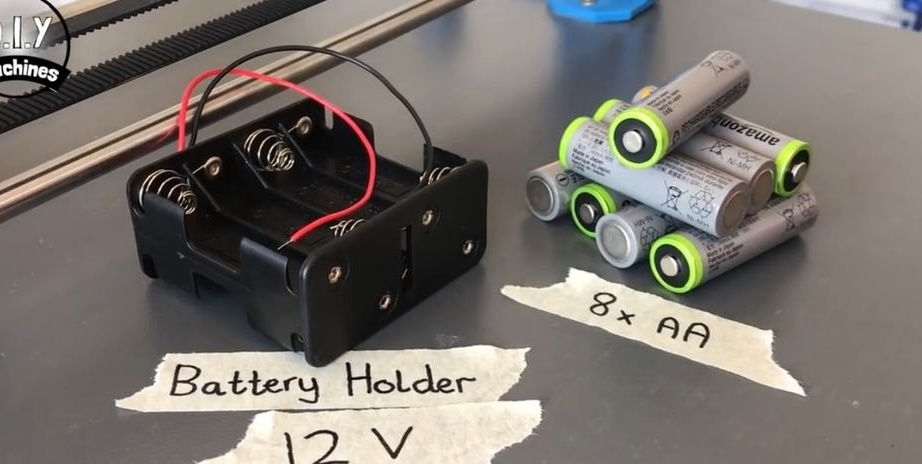
Caratteristiche del dispositivo: funziona su Arduino, prezzo accessibile, controllo bluetooth da qualsiasi gadget, autonomia (funziona da 8 batterie AA).
Per creare un tale dispositivo, il master ha utilizzato quanto segue
Materiali e strumenti:
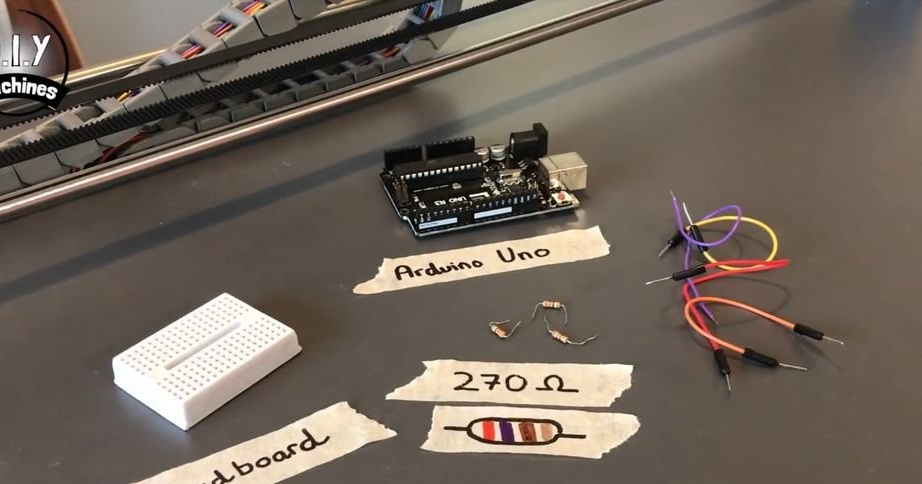
-Arduino Uno;
-Motore motore L293D;
- interruttore di contatto;
-Cuscinetti lineari;
-Motore passo-passo;
-Cavo e puleggia (versione 2m);
-Cavo e puleggia (versione 5m);
-HM10 modulo Bluetooth;
-Un cacciavite;
-Krepezh;
-Nozhki;
-Tavolo superiore;
-3D stampante;
-Asta di metallo;
- cacciavite;
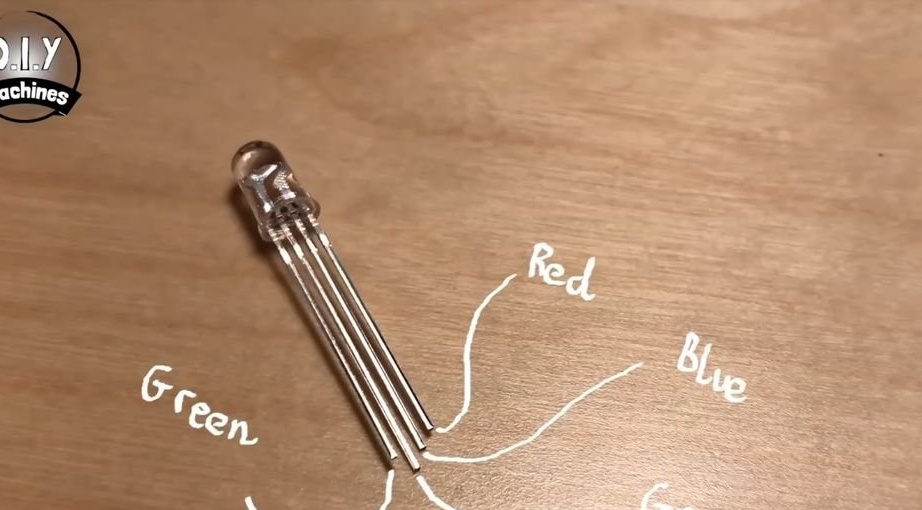
- LED RGB;
seeing-;
-Accessori per saldatura;
-Izolenta;
- Pistola per colla;
-Compartimento batterie;
-Konnektory;
Batteria a bottone;
-Computer con software;
- Supporti per bottiglie;
-la valvola;
-Bottiglia;
Primo passo: il tavolo
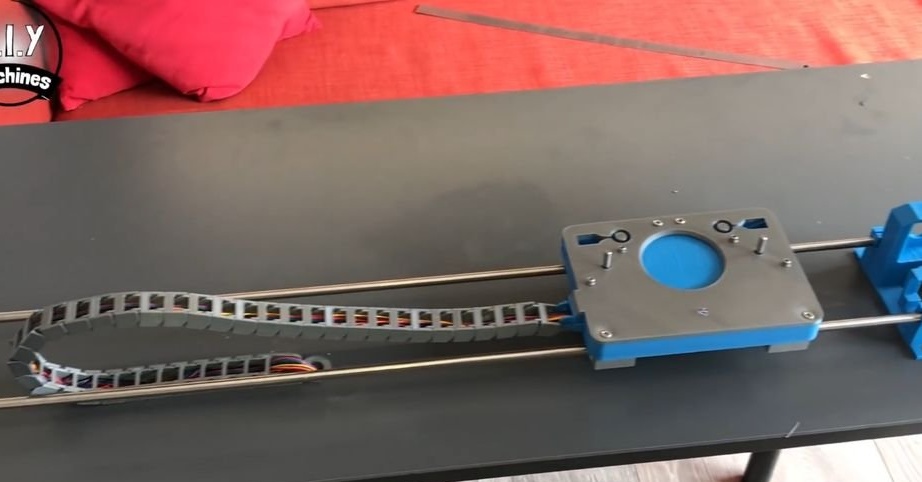
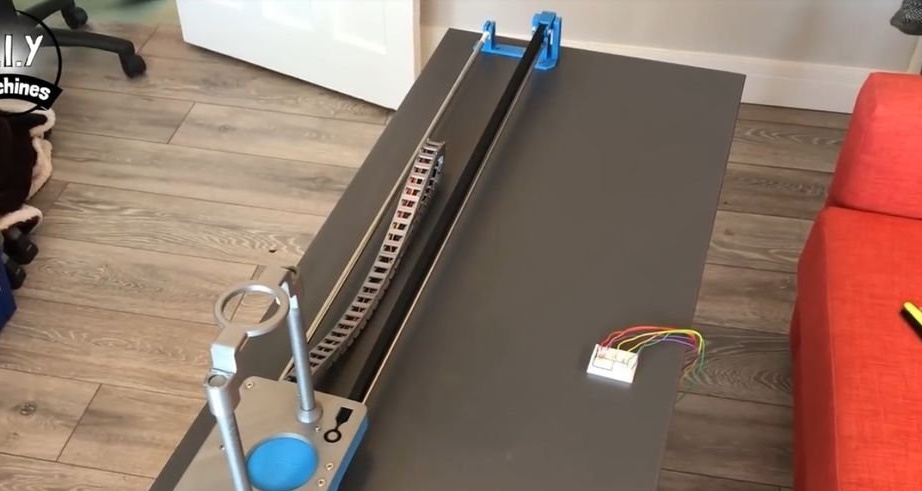
Innanzitutto, il master raccoglie il tavolo. Dimensioni tavolo 120 * 45 cm Spessore piano 18 mm.


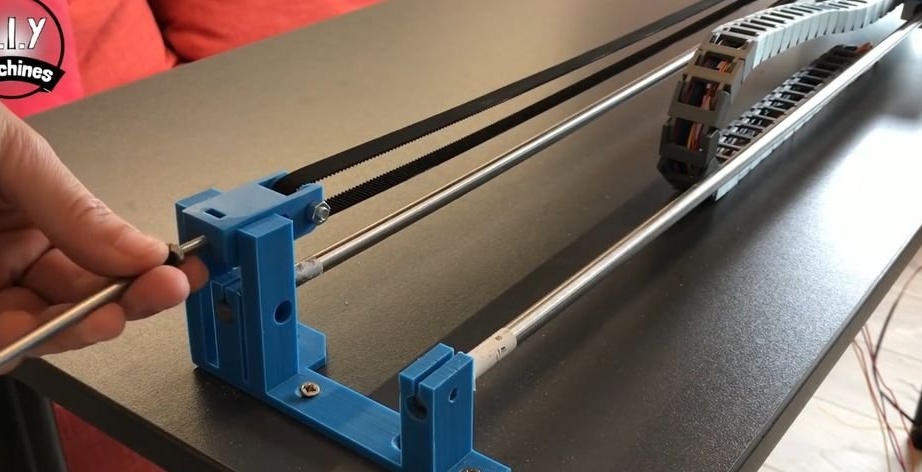
Fase due: tenditore
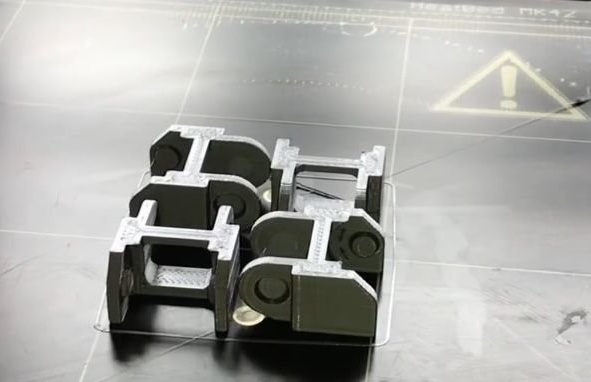
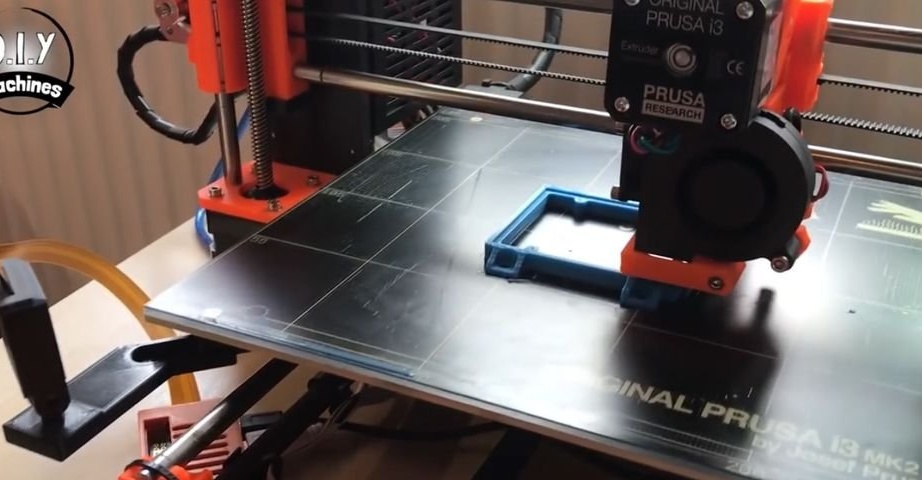
I file per la stampa delle parti possono essere scaricati di seguito.
File di stampa 3D.
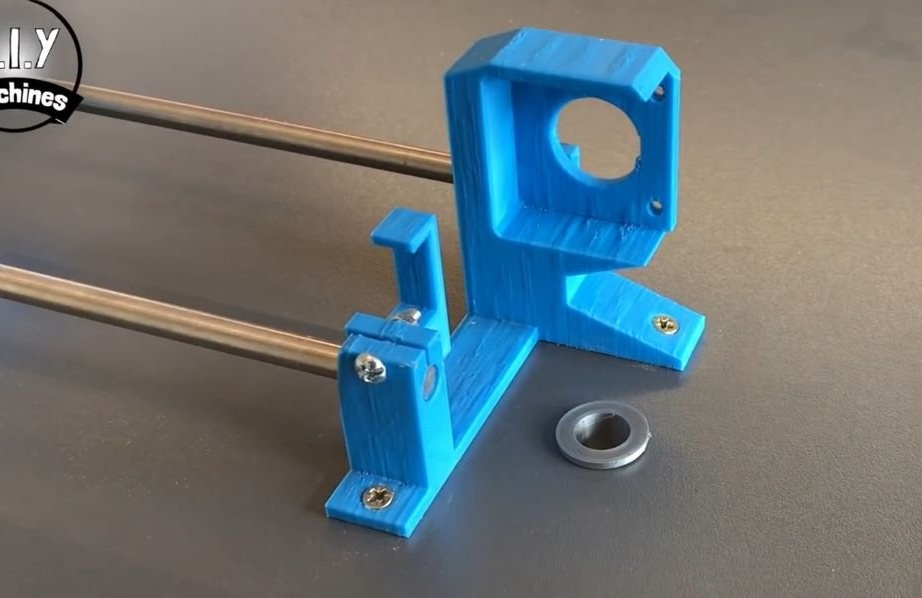
Ora sarà necessario stampare i primi due dettagli "idler.stl" e "Rod_Clamp_V5.stl".
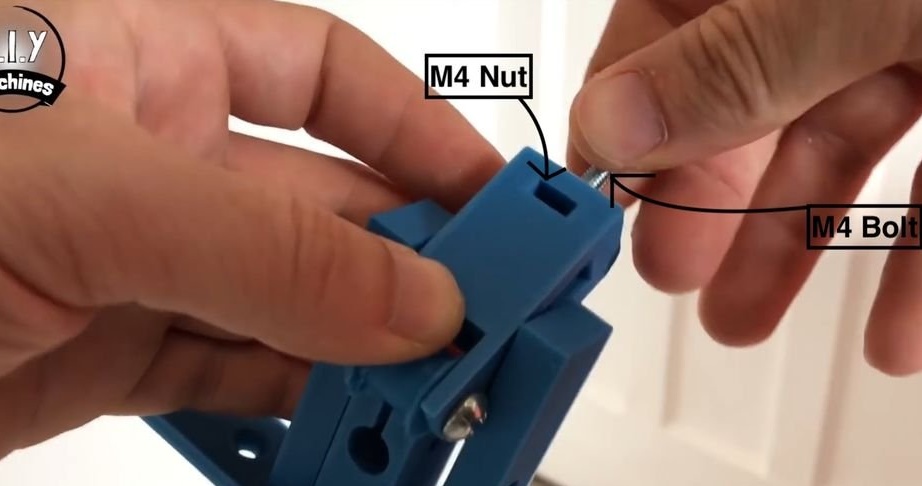
Dopo la stampa, è necessario collegare il rullo di tensione al morsetto dello stelo utilizzando un lungo bullone M4 e un dado. Non è necessario un serraggio forte, poiché il rullo deve ruotare liberamente.
Quindi le due parti sono collegate insieme.
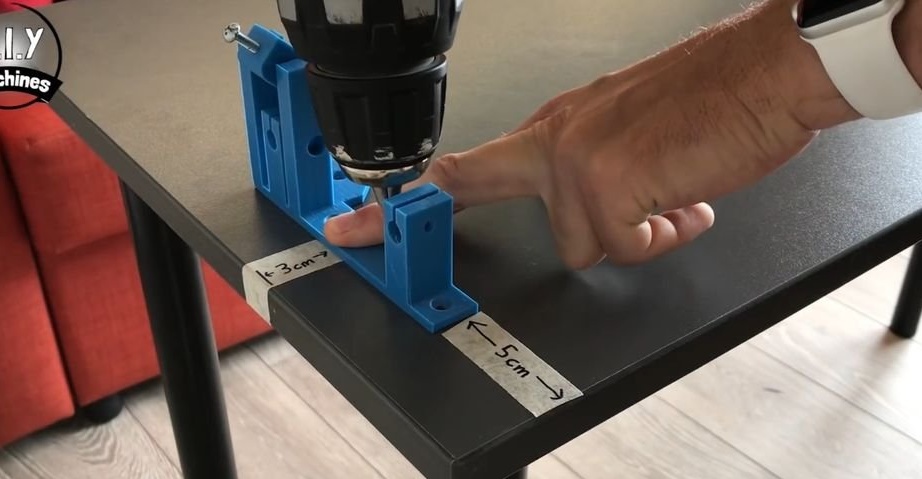
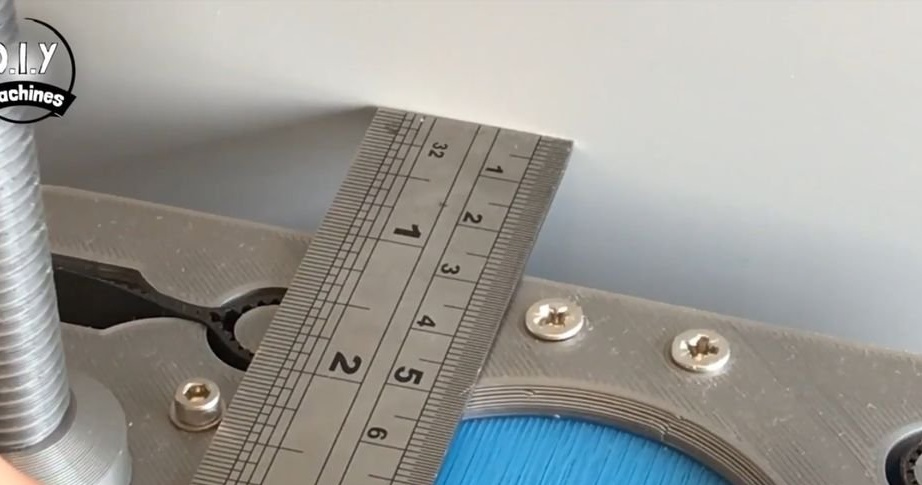
Segna su un tavolo 3 cm dall'estremità corta sinistra e 5 cm dal bordo anteriore e stringe il tenditore.

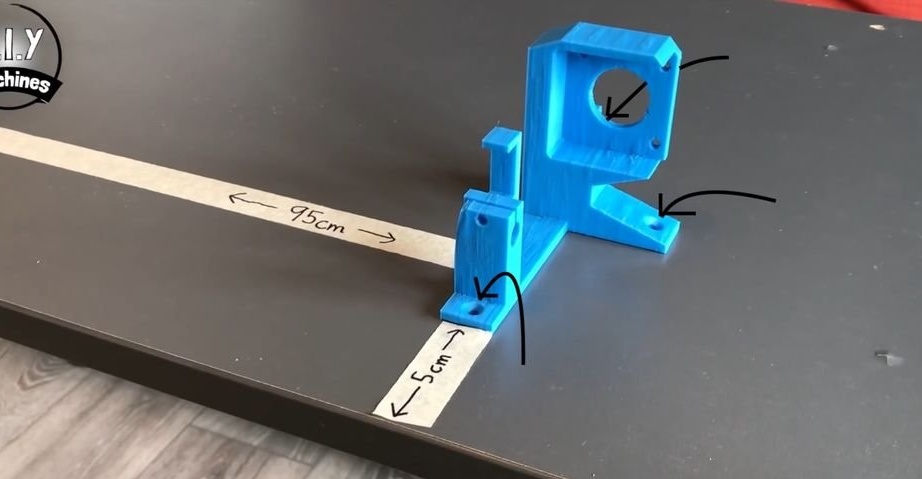
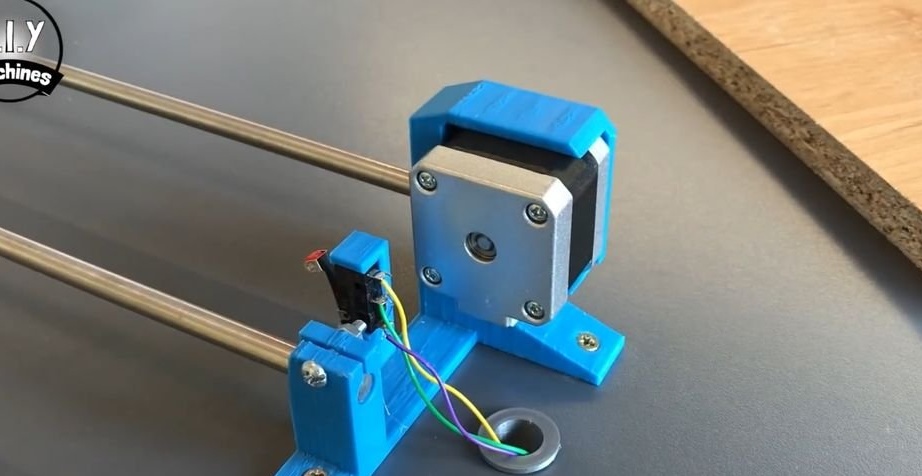
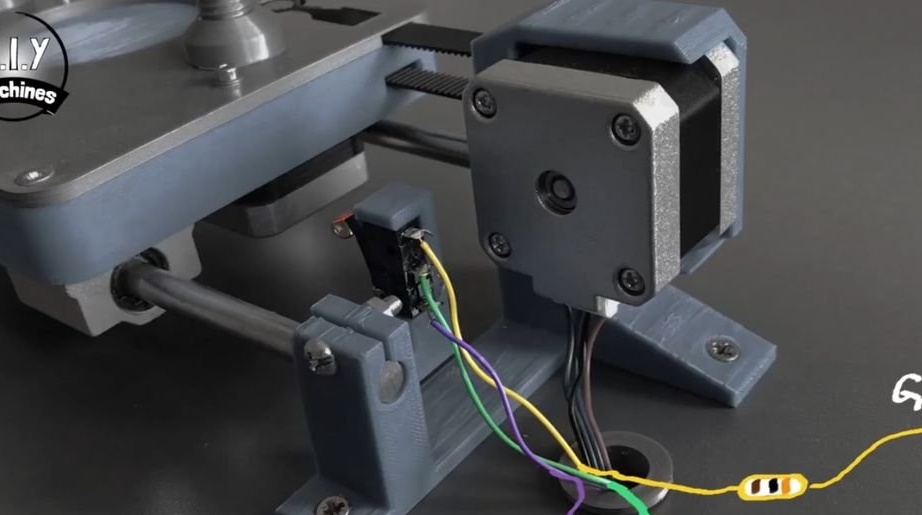
Fase due: supporto motore
Stampa il supporto del motore, file "X_Axis_Motor_Mount.stl". Si fissa sul piano del tavolo a una distanza di 95 cm dal tenditore e 5 cm dal bordo del tavolo.
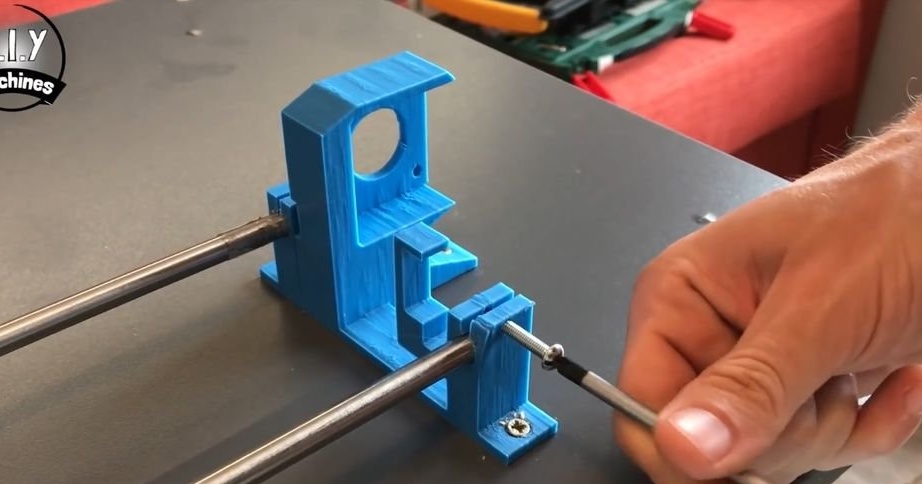
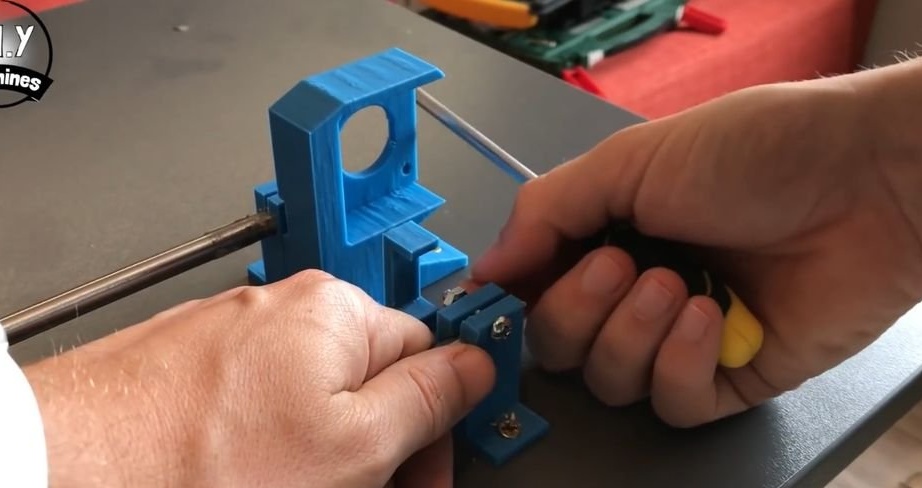
Terzo passaggio: guide
Imposta le guide. La lunghezza delle aste è di 1 metro.
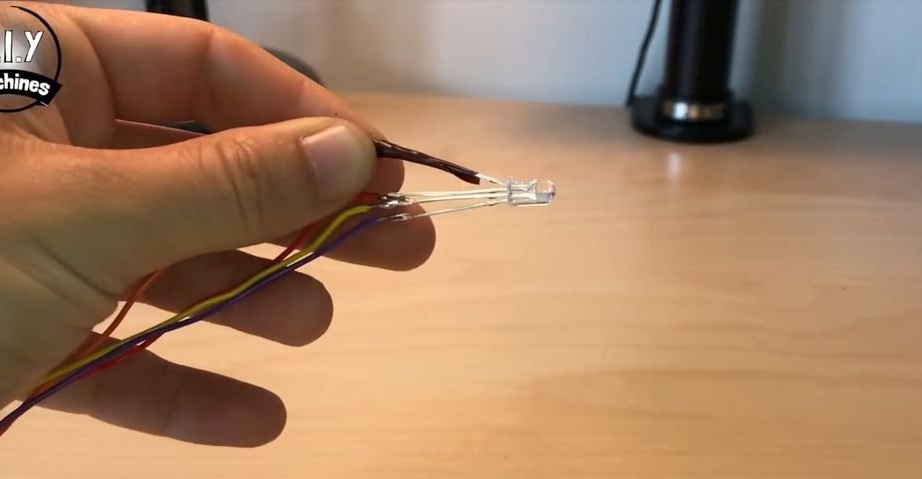
Quarto passaggio: LED
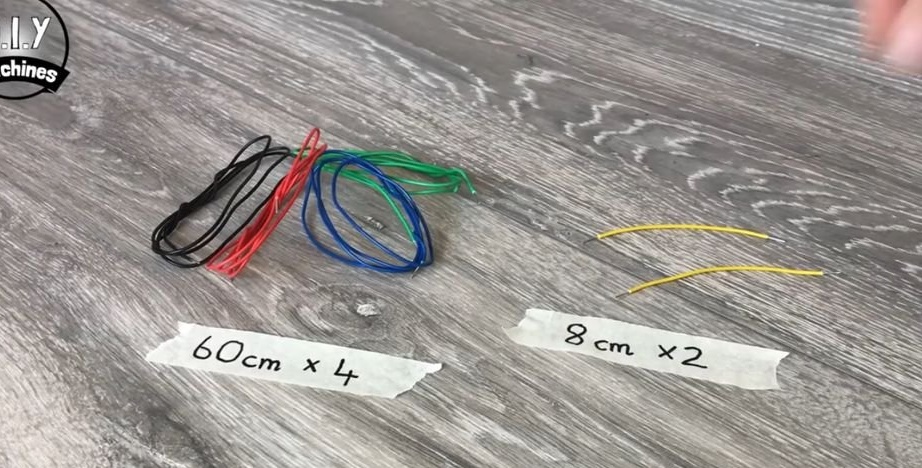
Il master utilizzerà il LED RGB per l'indicazione. Saldare fili di 180 cm di diversi colori per ogni gamba. La giunzione isola.




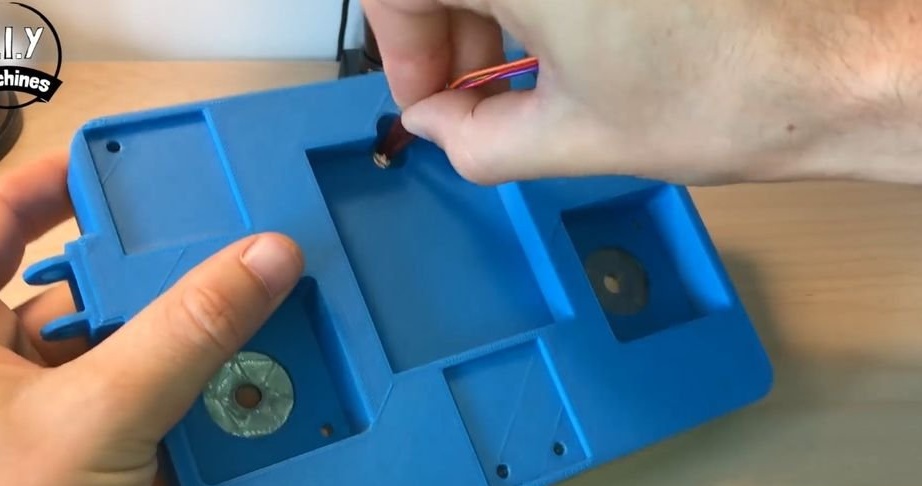
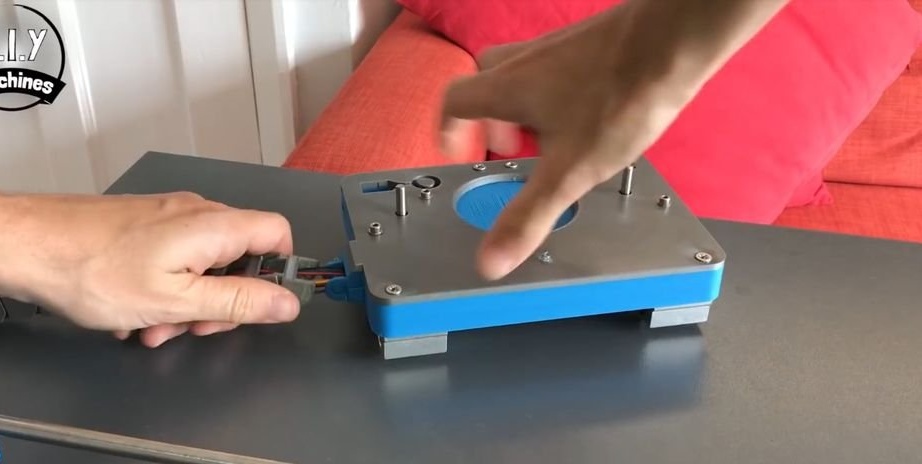
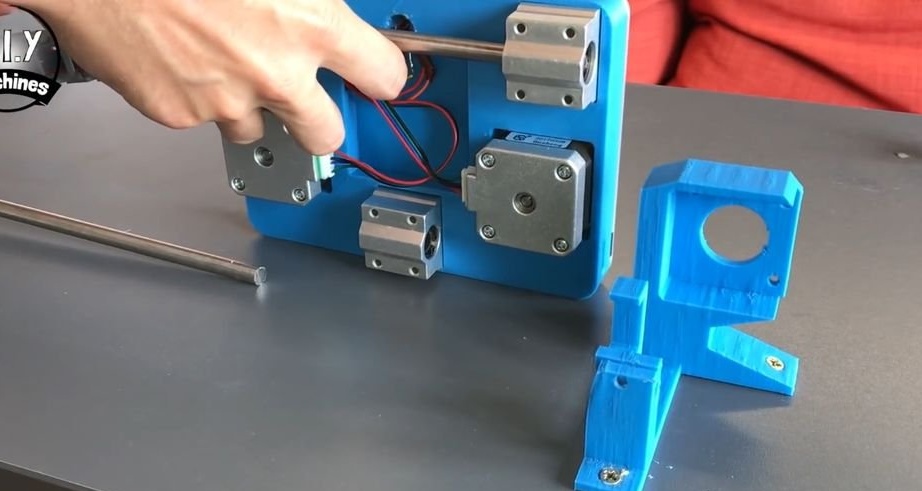
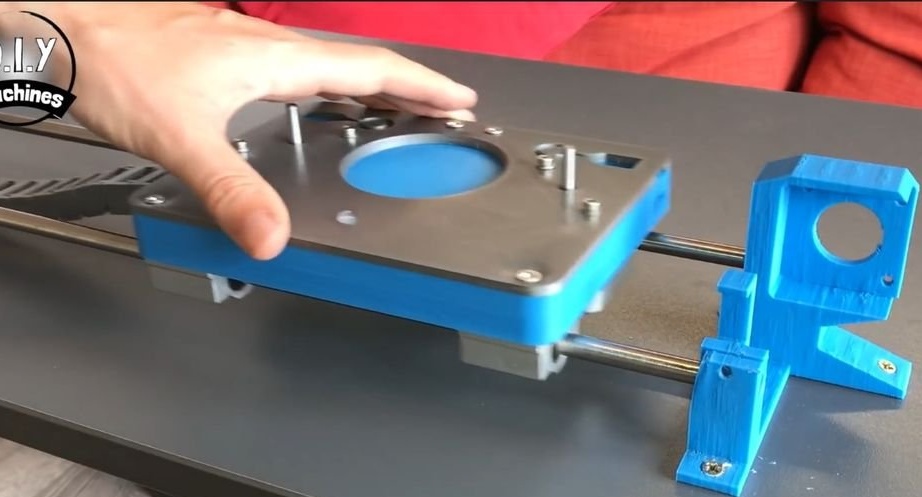
Fase cinque: piattaforma
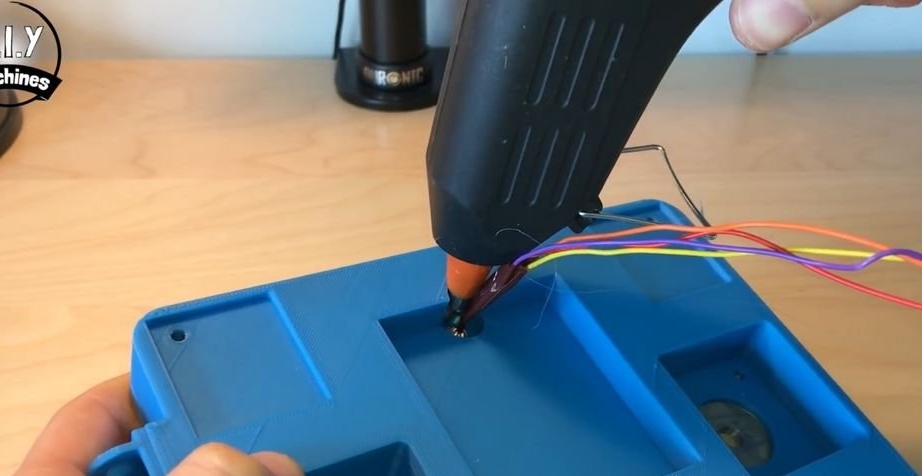
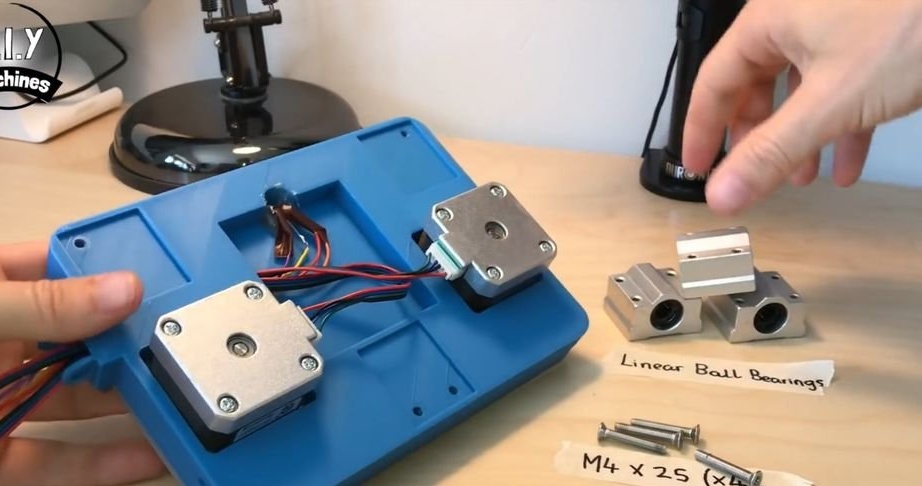
Stampa la parte 'slider_base_v3.stl'. Risolve un LED. Installa motori passo-passo.
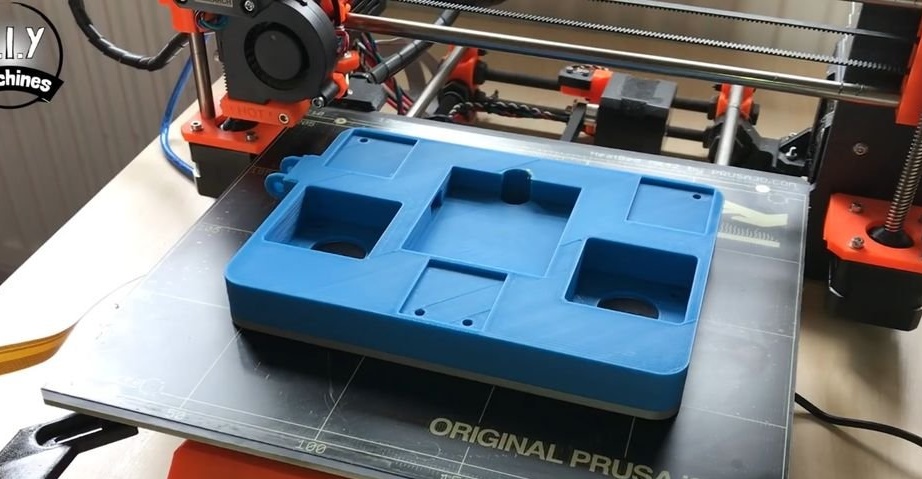

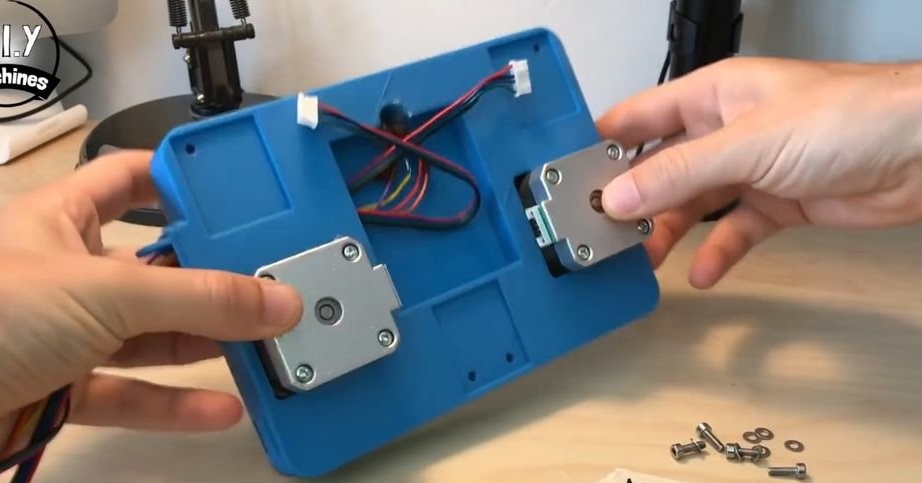
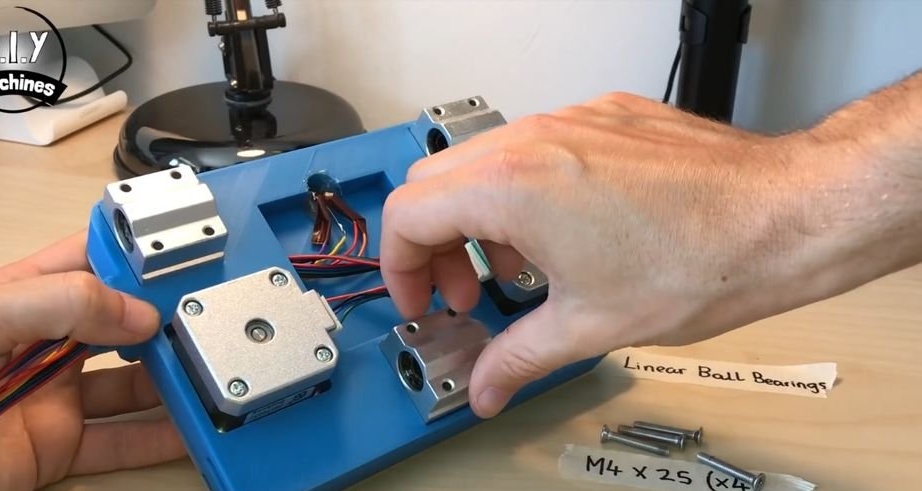
Installa cuscinetti lineari.
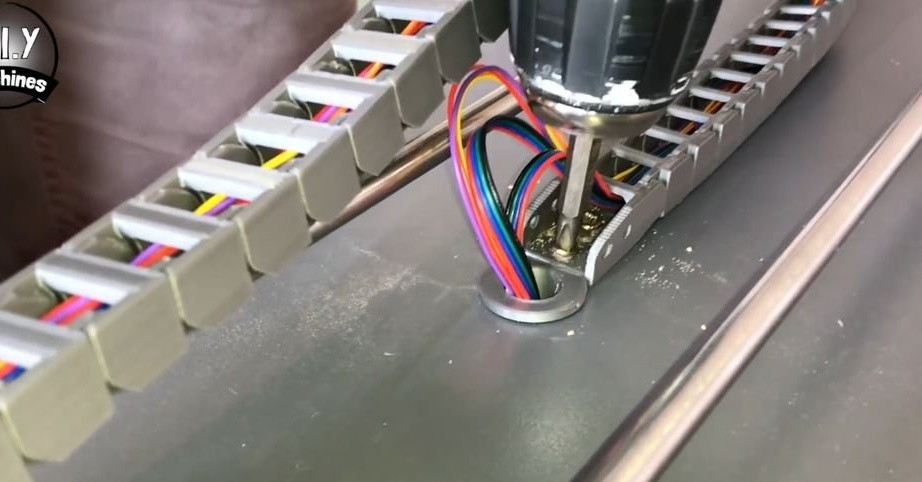
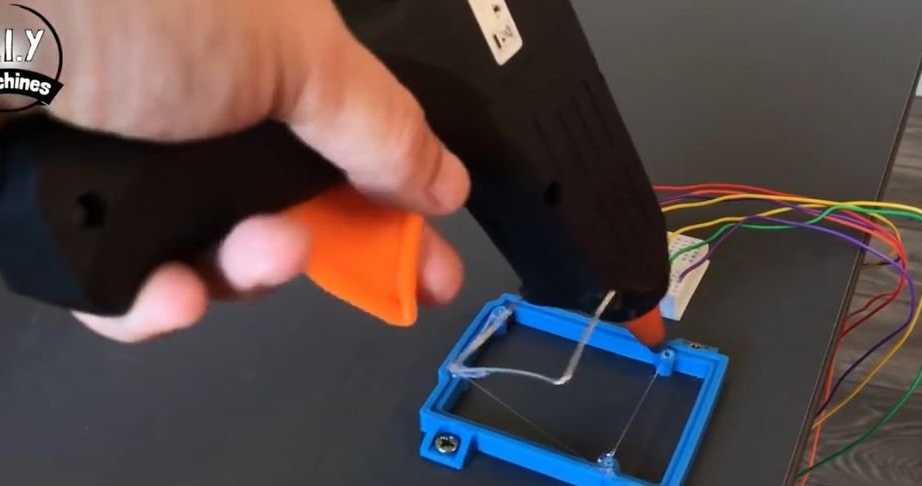
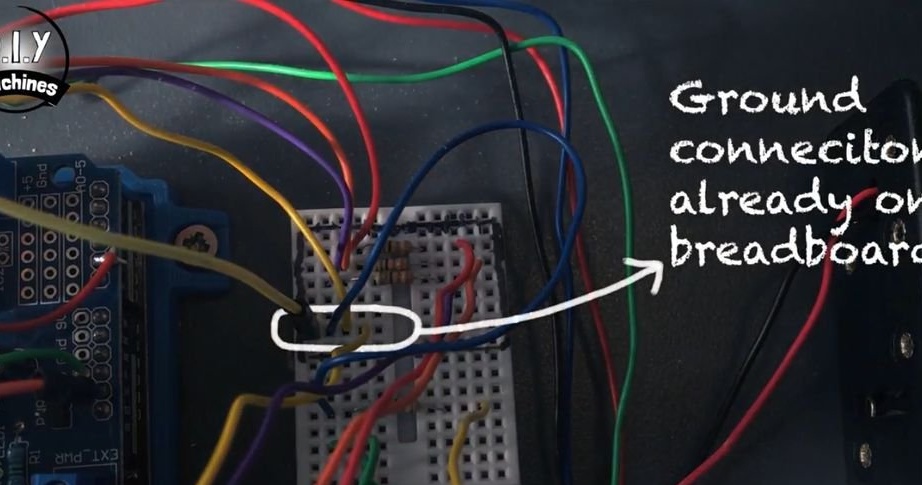
Passaggio 6: canale via cavo
Il canale del cavo per il dispositivo è costituito da segmenti separati collegati in un singolo circuito.All'interno del circuito vengono posati i fili. La catena è mobile e si piega se necessario. I segmenti di catena sono anche stampati sulla stampante.


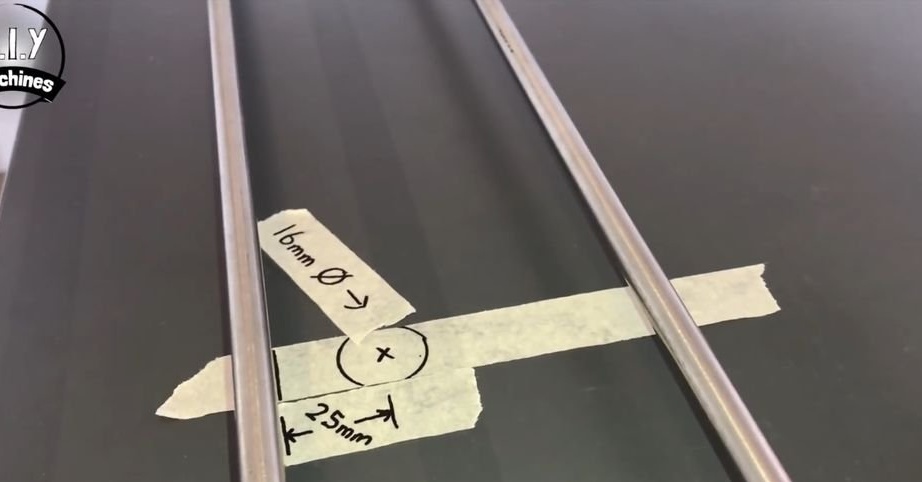
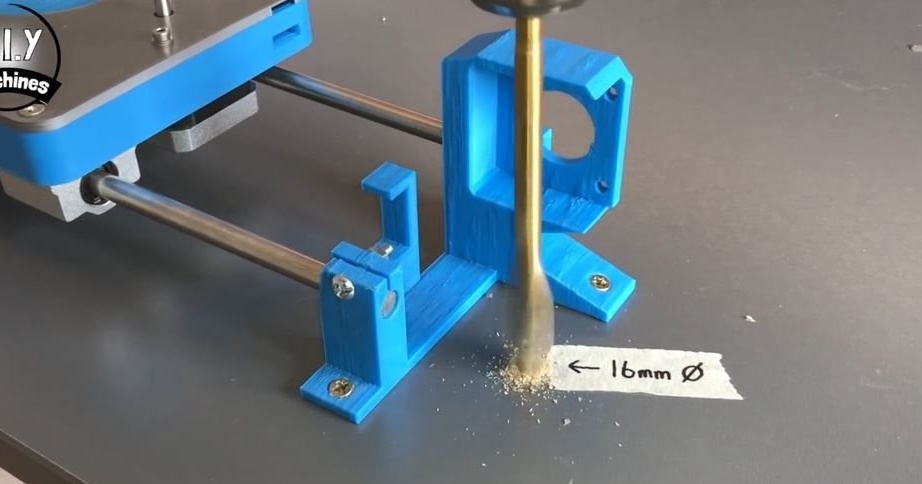
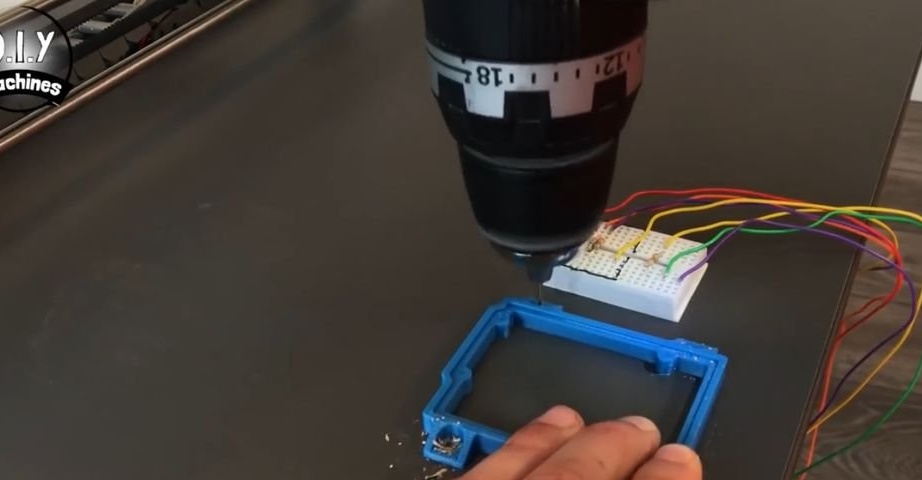
Ad una distanza di 25 mm dalla guida estrema e 47 cm dal tenditore, pratica un foro di 16 mm. Inserisce la manica "Table_Tidy.STL" nel foro. Chiude il canale del cavo un'estremità sulla piattaforma, la seconda sul piano di lavoro vicino alla manica. Allunga i fili.



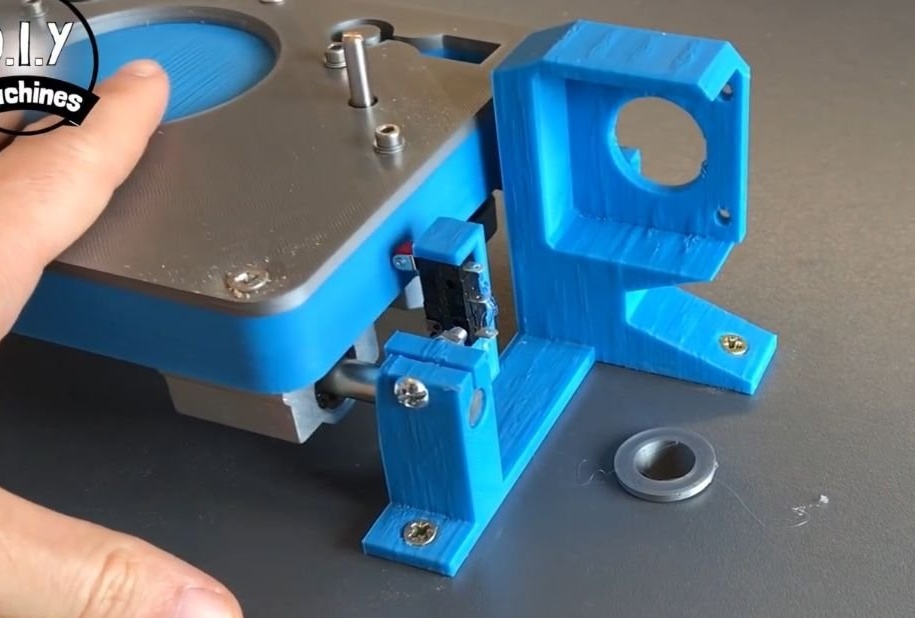
Settimo passo: passare
Accanto al supporto del motore, viene praticato un altro foro da 16 mm. Inserisce una manica al suo interno. Fissa il rimorchio al supporto. Saldare ai suoi contatti per 1 metro di filo.

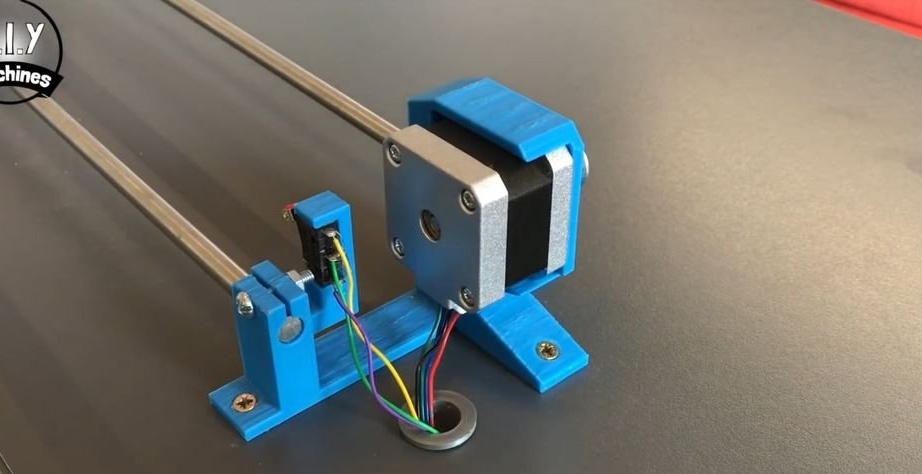
Passo otto: motore dell'asse X.
Protegge il motore da montare.

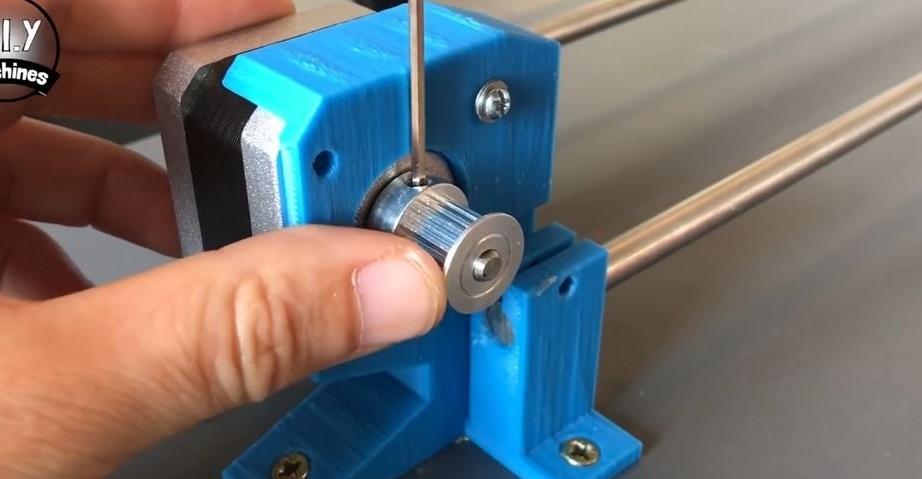
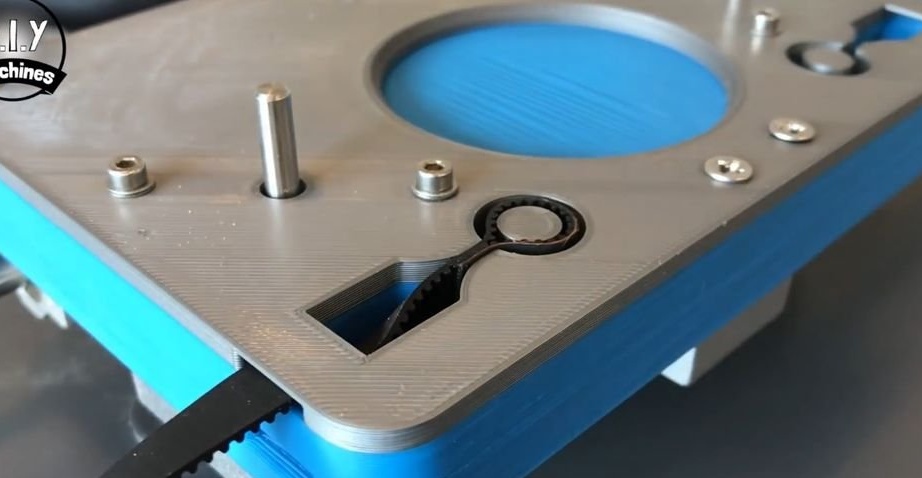
Step Nine: Belt
Fissa la puleggia sull'albero motore. Fissa l'estremità della cintura ai supporti della piattaforma. Tira la cinghia attraverso la puleggia e attraverso la puleggia tenditore. Fissa la seconda estremità ai supporti. Se necessario, è possibile regolare la tensione della cinghia serrando o svitando la vite.







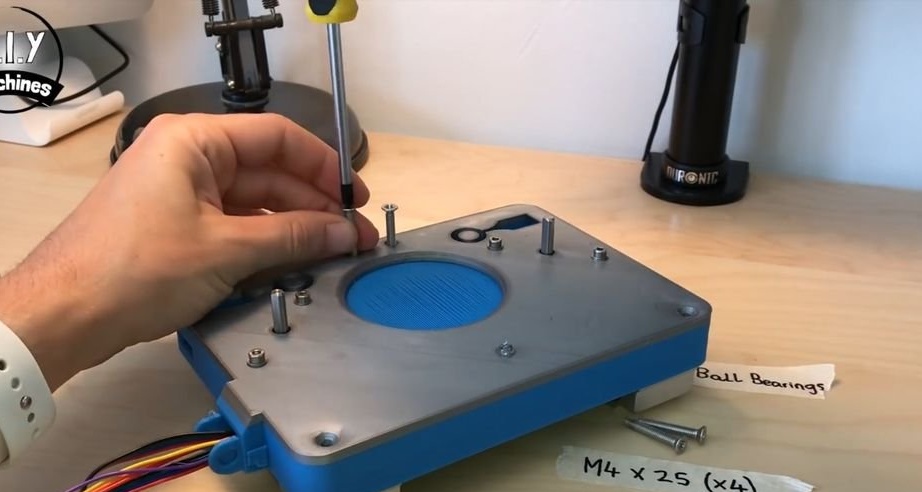
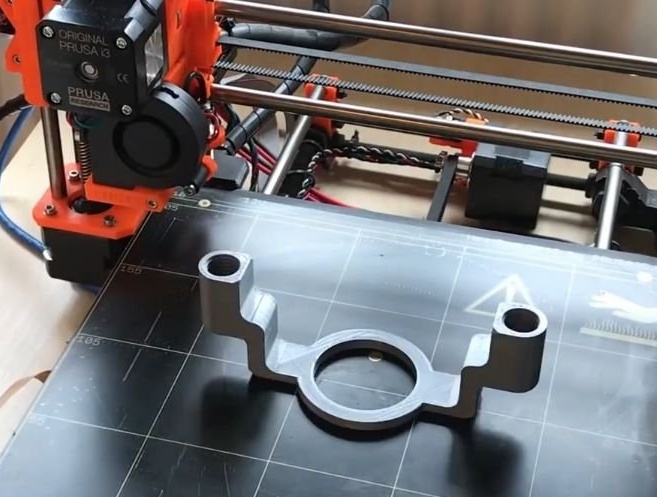
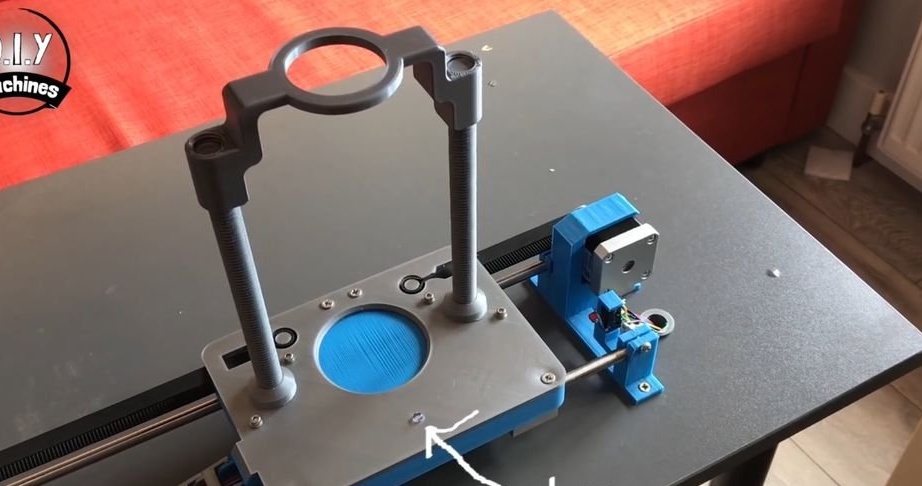
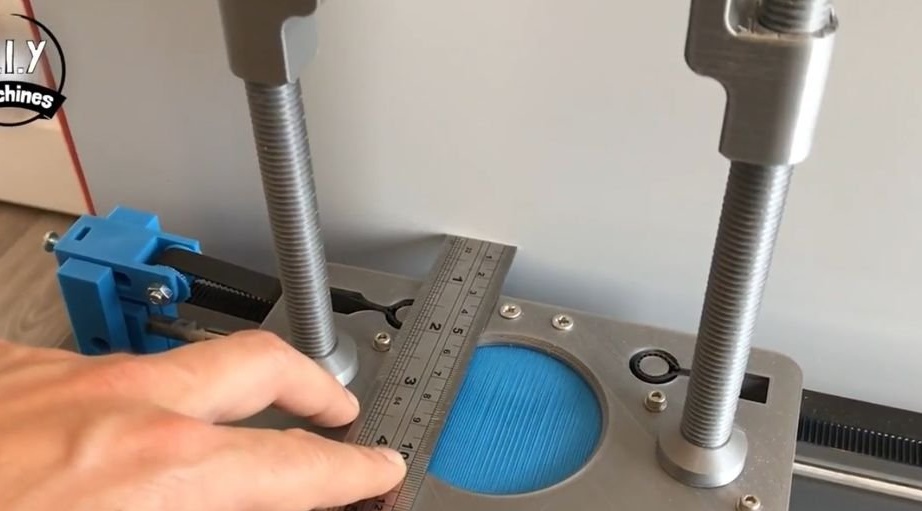
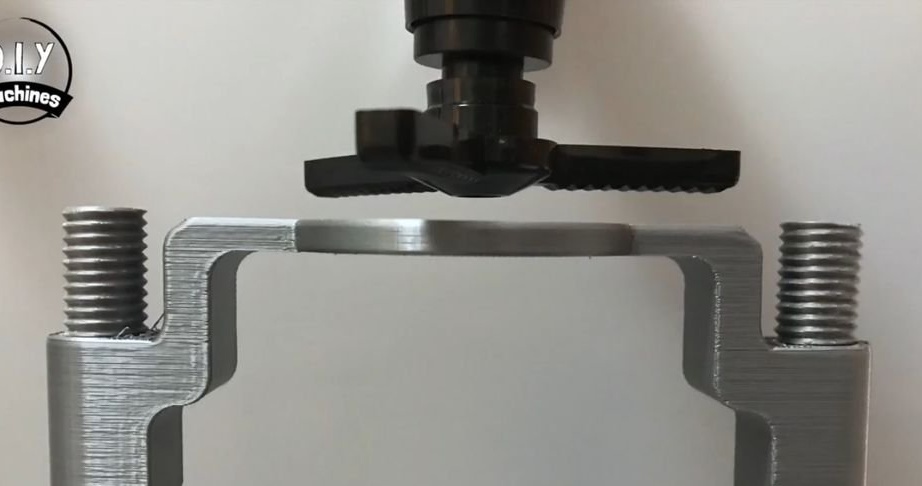
Passo dieci: portabicchieri
Stampa due barre filettate main_rod2.3.STL e il supporto Dispenser_Paddle_V2.STL. Si fissa su una piattaforma.



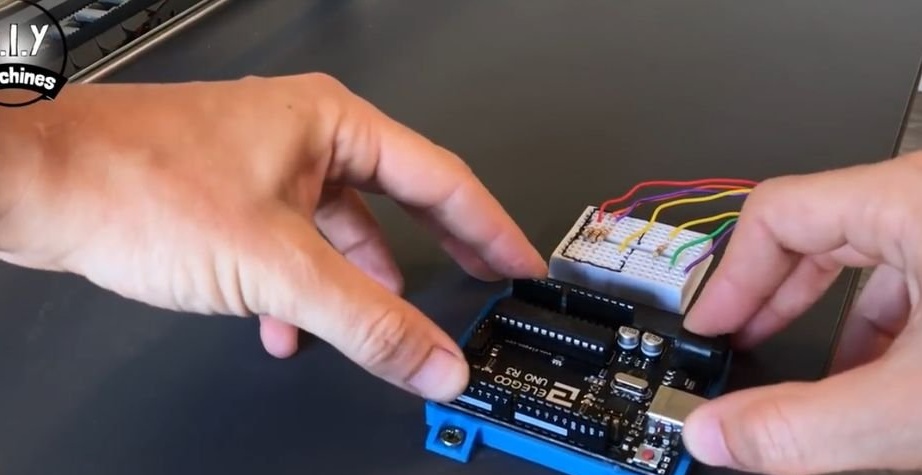
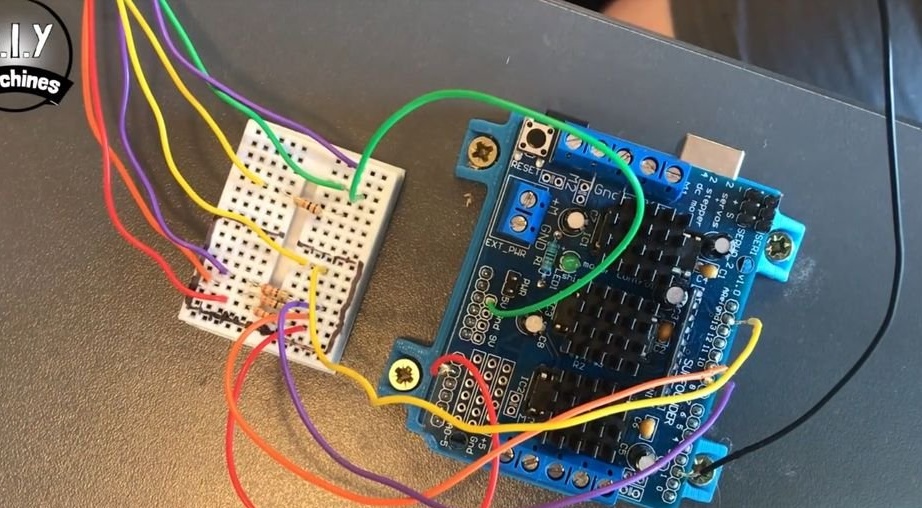
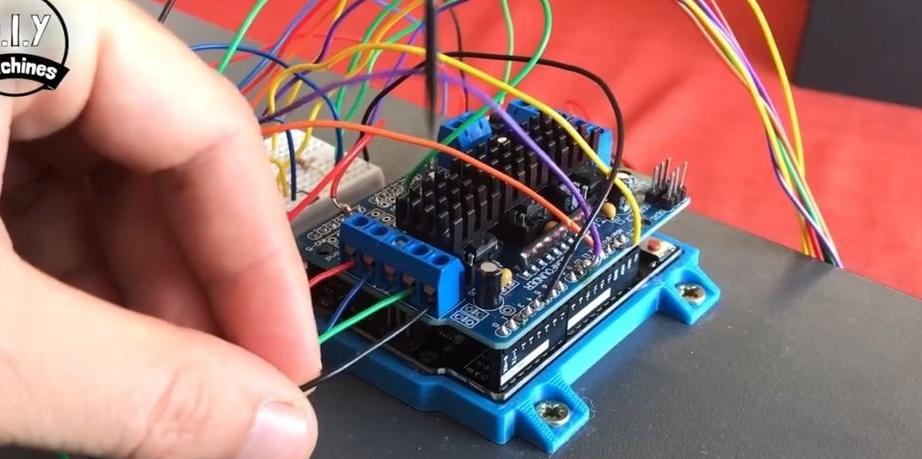
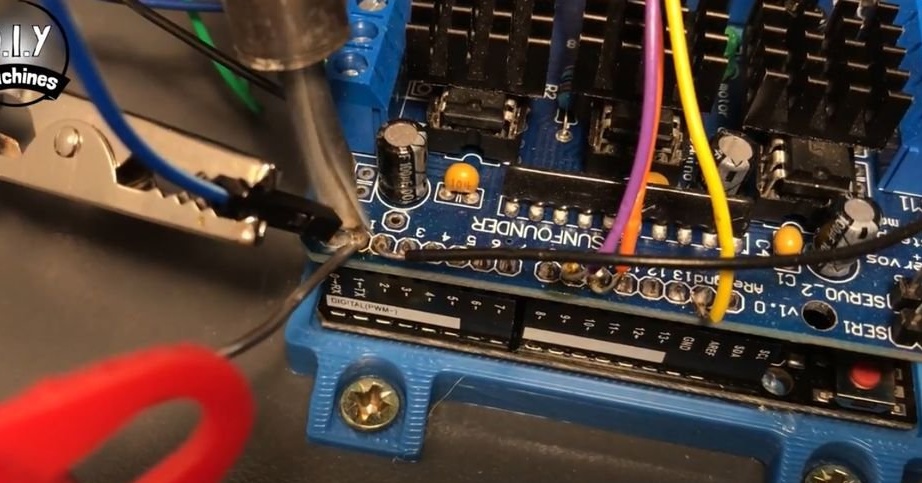
Passo undici: indicatore, rimorchio, breadboard
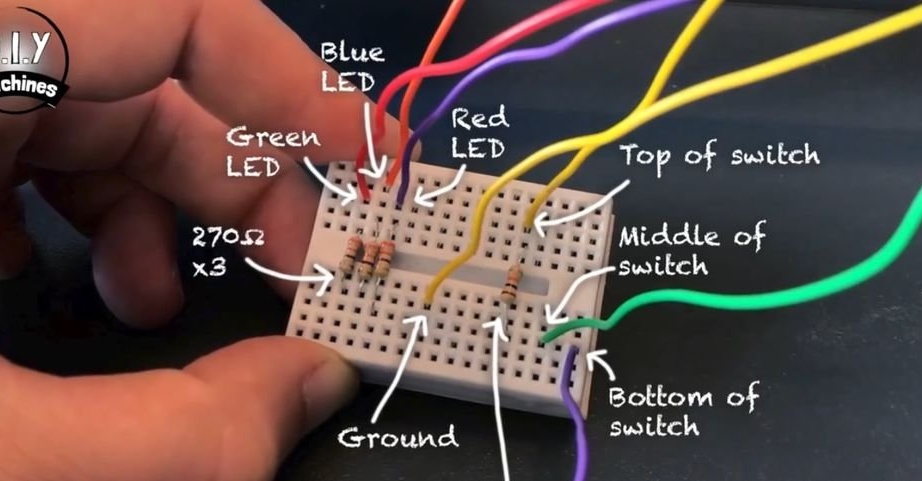
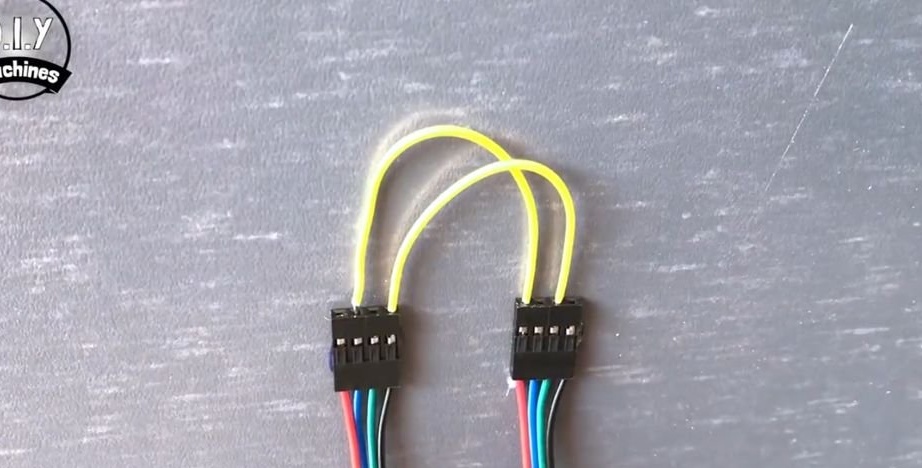
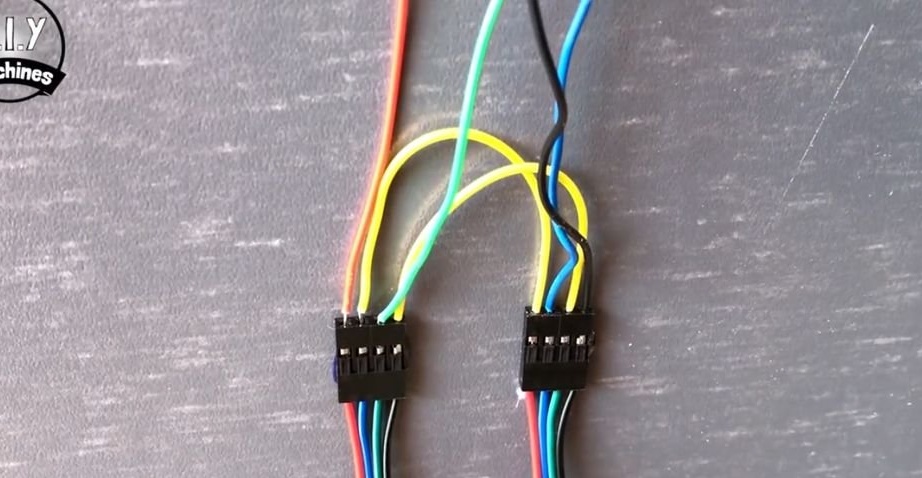
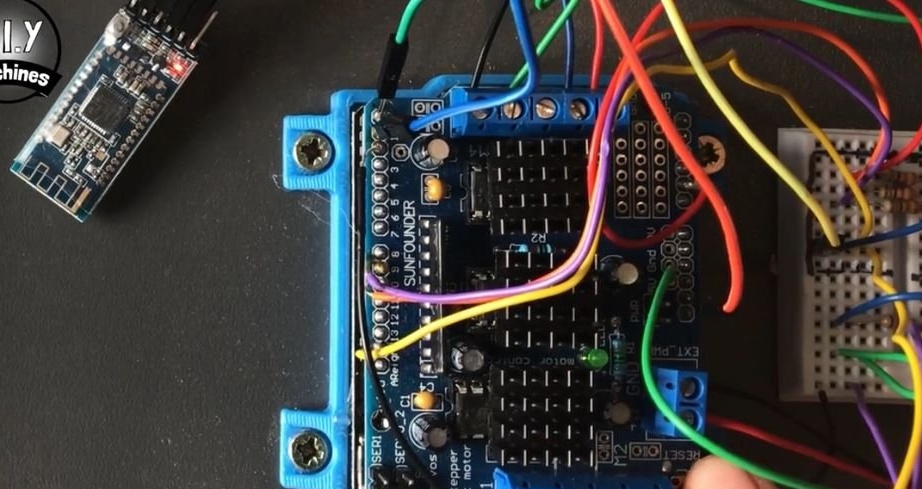
LED RGB, ha quattro gambe. Una gamba è comune e tre di colore. Il master prende altri quattro fili, ciascuno lungo circa 15 cm, e li salda come segue (con i colori della luce a LED) al modulo driver del motore:
Rosso per appuntare D9
Blu per appuntare D10
Verde al perno A1
Il catodo al pin GND.
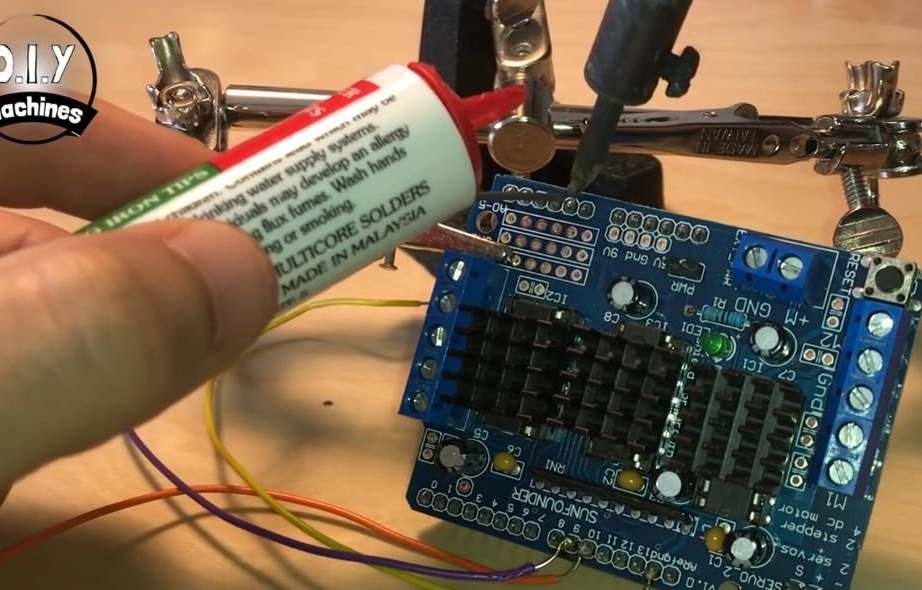
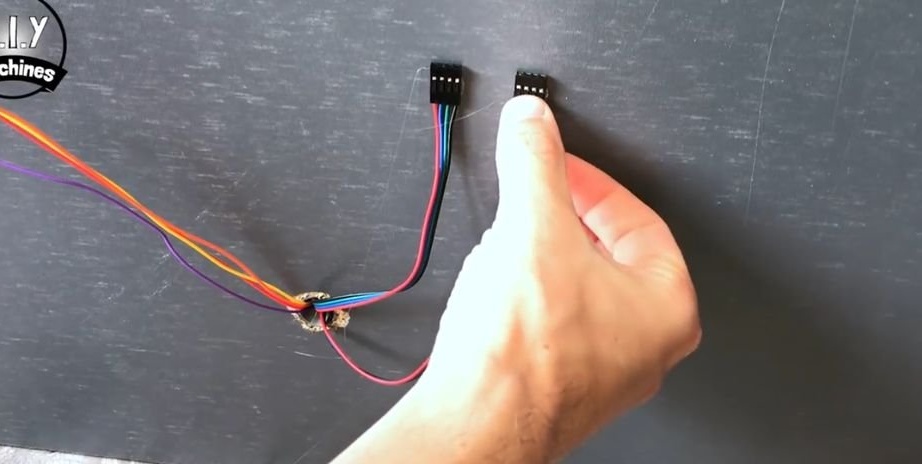
Collega il rimorchio: il contatto superiore è GND, il contatto centrale è 5 V, il contatto inferiore è l'uscita n. 2.
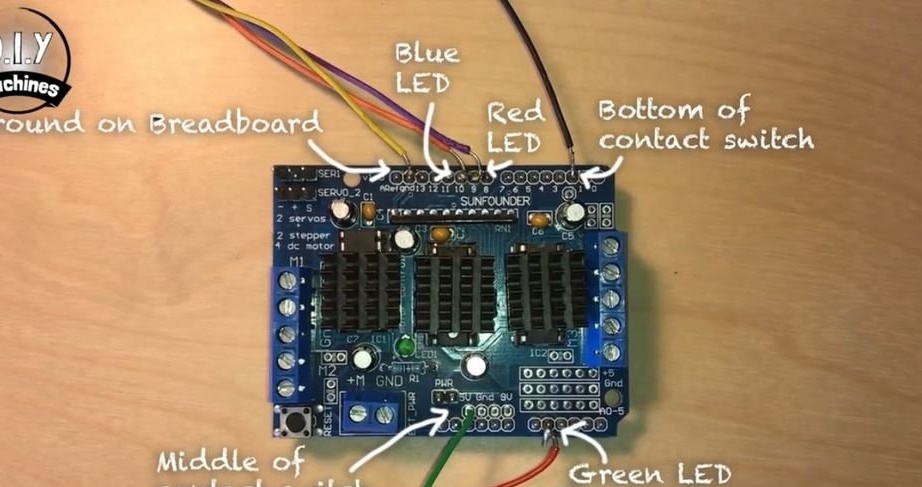
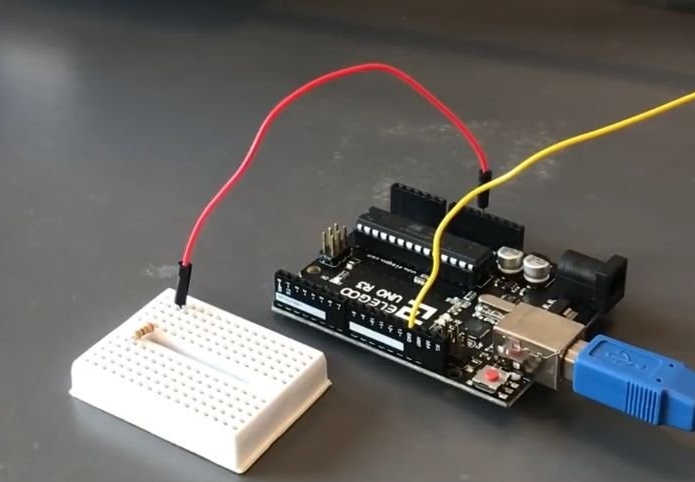
Successivamente monta tutto su una breadboard (vedi foto). Protegge la scheda al tavolo.
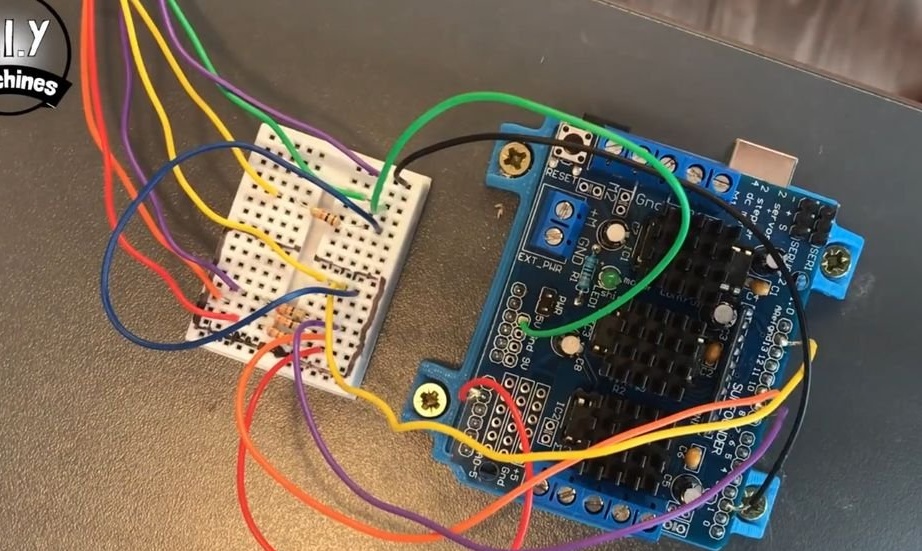
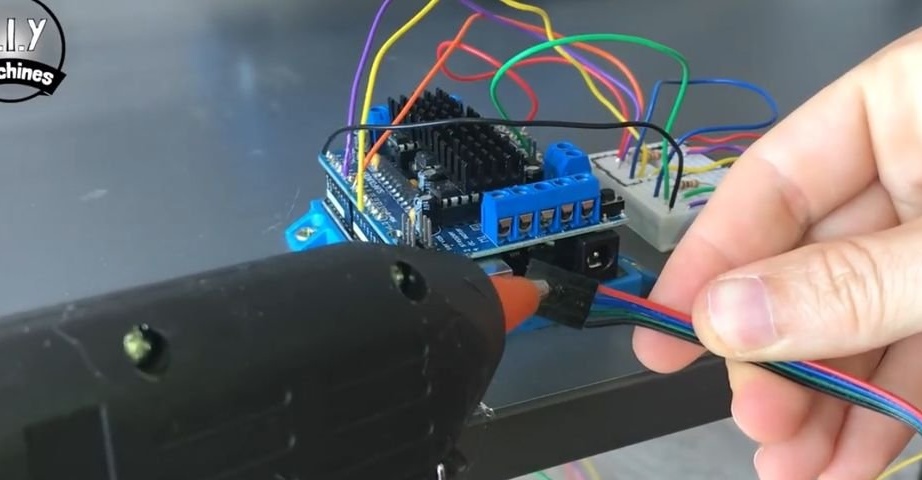
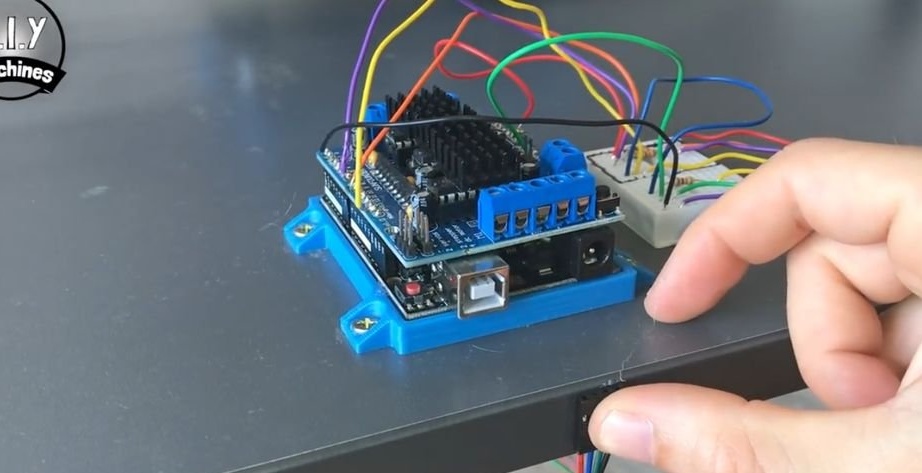
Dodici passi: Arduino
Stampa la piastra di montaggio per Arduino. Fissa il piatto al tavolo. Si fissa su un piatto di Arduino. Installa un modulo del driver del motore su Arduino.
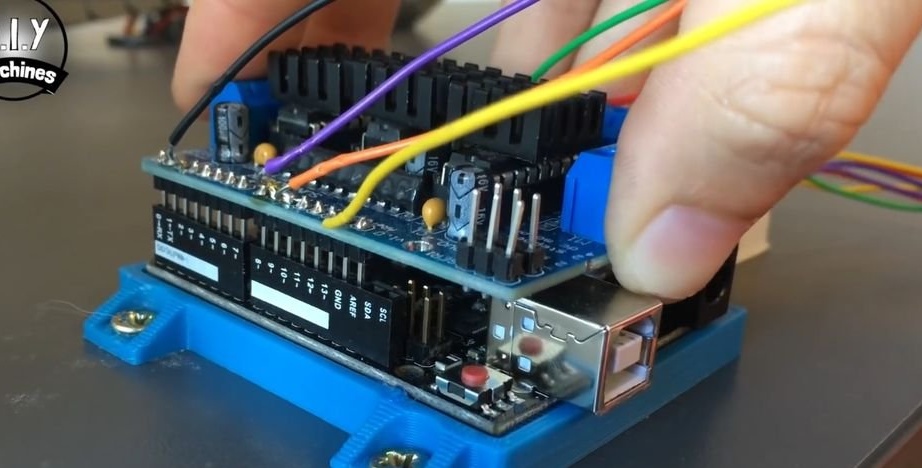
Collega i fili dal driver alla breadboard, come nella foto.
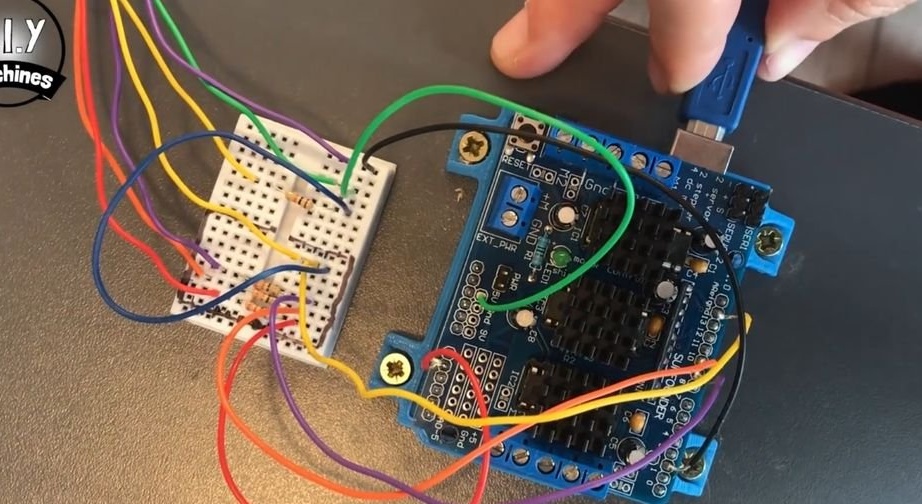
Step 13: Scarica il codice
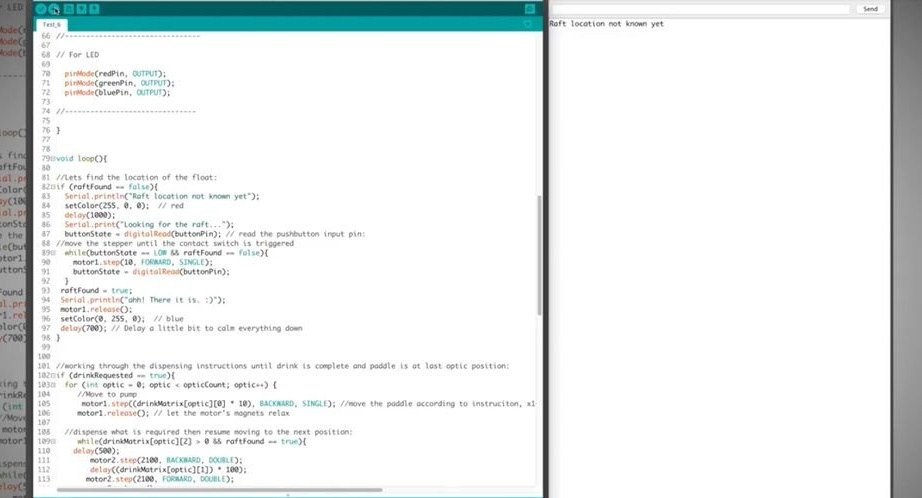
Collega Arduino a un PC e scarica il codice. È possibile trovare il codice qui.
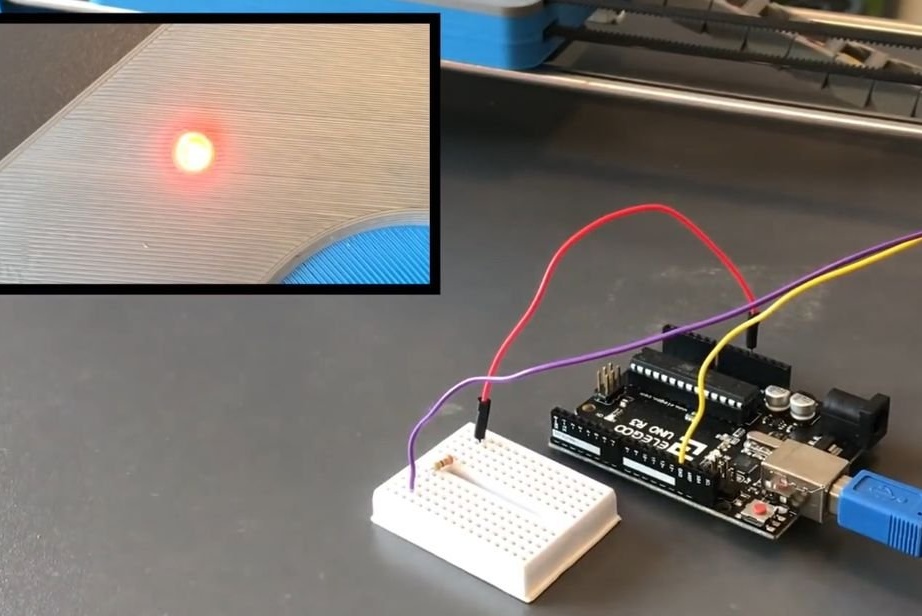
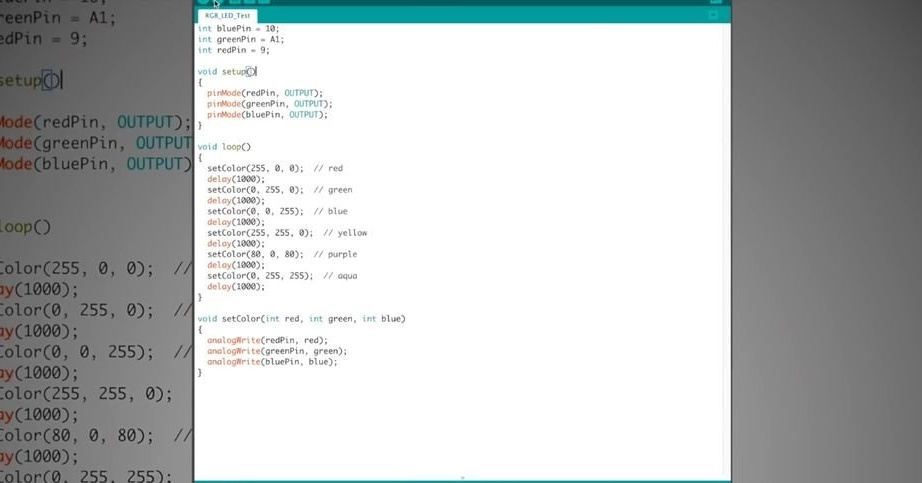
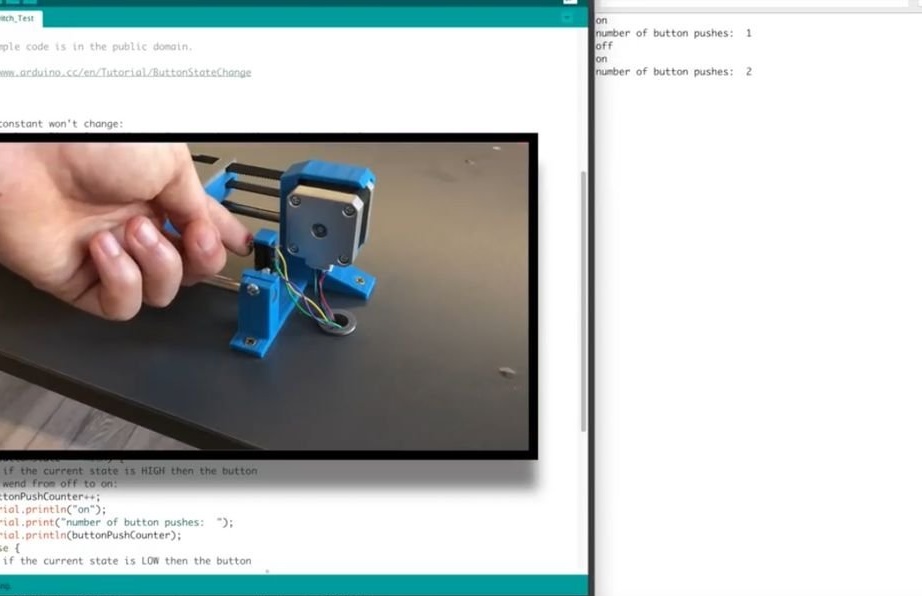
Esegue il codice di test LED. Il LED dovrebbe accendersi in diversi colori.
Il seguente script da scaricare è "Contact_switch_test". Non appena viene caricato, ogni pressione del finecorsa dovrebbe essere visualizzata sul monitor.

Quattordicesima fase: collegamento dei motori X e Z.
Protegge il connettore proveniente dal motore X attraverso la breadboard sul tavolo. Si collega con i fili del driver.
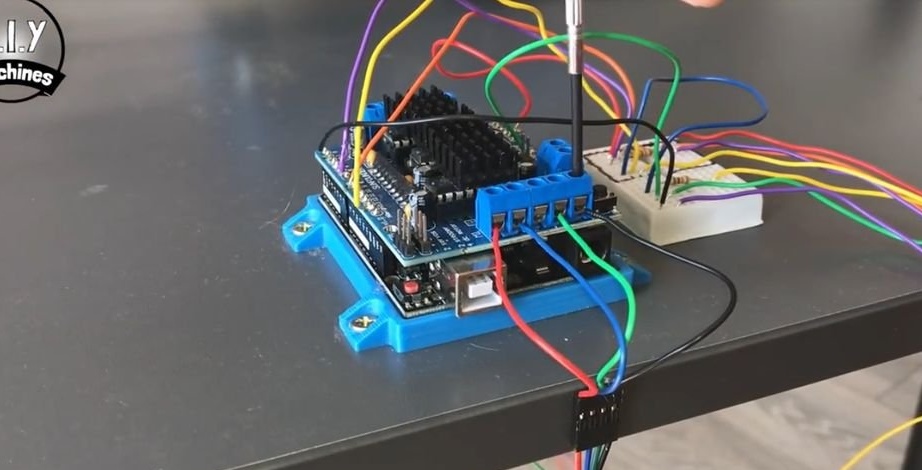
Collega i motori passo-passo dell'asse Z.
Passo quindici: vano batteria
Rimuove un ponticello su un modulo. Collega il vano batteria.
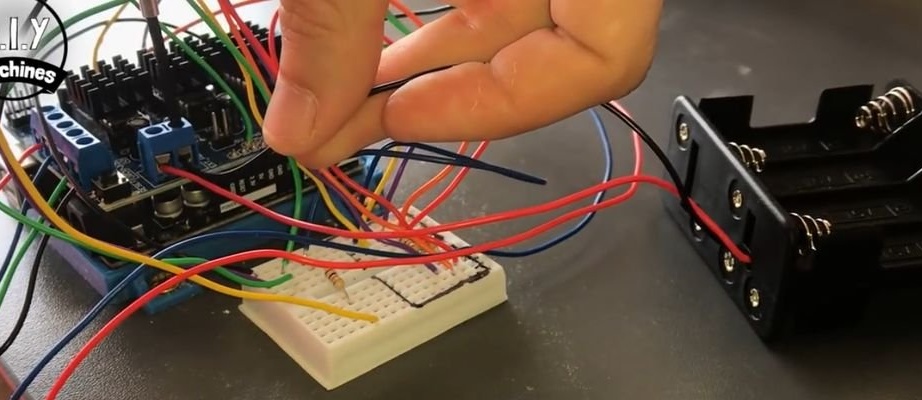
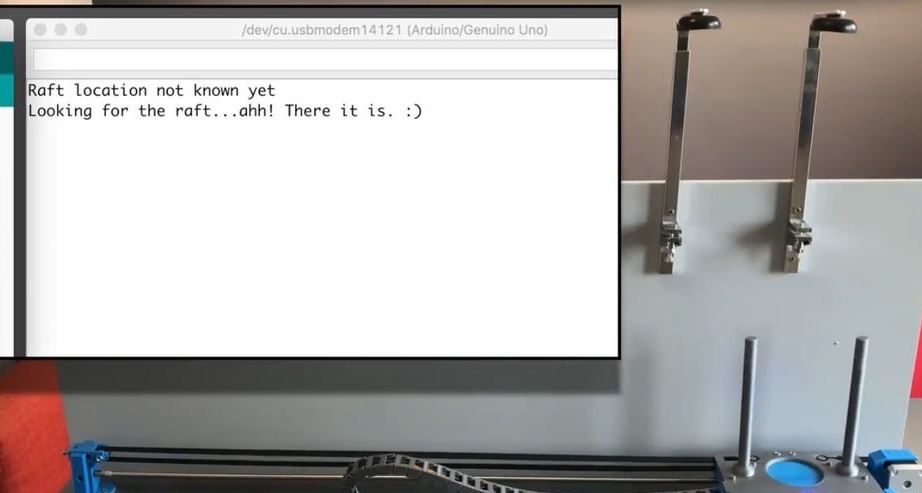
Ora puoi eseguire "test 1". Il LED rosso dovrebbe accendersi e la piattaforma dovrebbe raggiungere il finecorsa. Quindi il LED diventerà verde.
Step sedici: portabottiglie
L'uso di staffe protegge la parete posteriore dell'MDF.




Sposta ulteriormente la piattaforma di 1 cm dal finecorsa. Allinea il portabicchieri e fissa il portabottiglie al distributore (purtroppo il maestro non ha fornito una descrizione per la fabbricazione o l'acquisto del supporto). Avanti. i supporti sono fissati ogni 12 cm.



Passo diciassette: codice, calibrazione, test
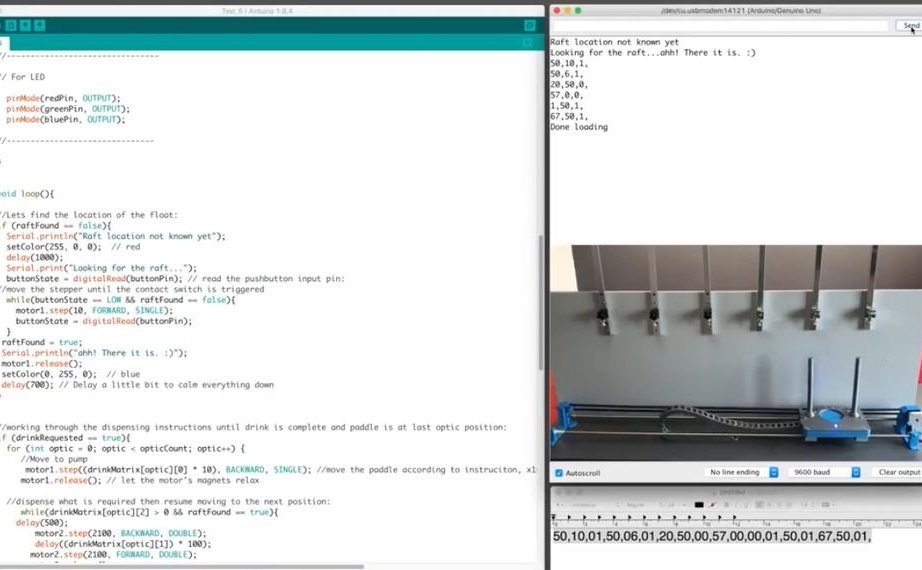
Carica il codice principale in https://www.thingiverse.com/thing:2478890
Nell'impostazione sono impostati i seguenti valori: 50,10,01,50,06,01,50,50,00,57,00,00,50,50,02,50,50,00. Il master ha sei distributori. Nelle impostazioni ci sono sei gruppi di tre, in cui la prima cifra è la distanza dal finecorsa, il primo distributore, il secondo distributore, ecc., La seconda cifra è il momento in cui la bevanda è stata versata nel bicchiere, la terza è il numero di versamento. Tutti questi valori possono essere modificati in base alle esigenze.


La prima bevanda che il dispositivo ha preparato è stata gin e cola. Per equalizzare la pressione nella bottiglia con la cola, è necessario praticare un foro. Quindi la procedura guidata imposta i parametri necessari.



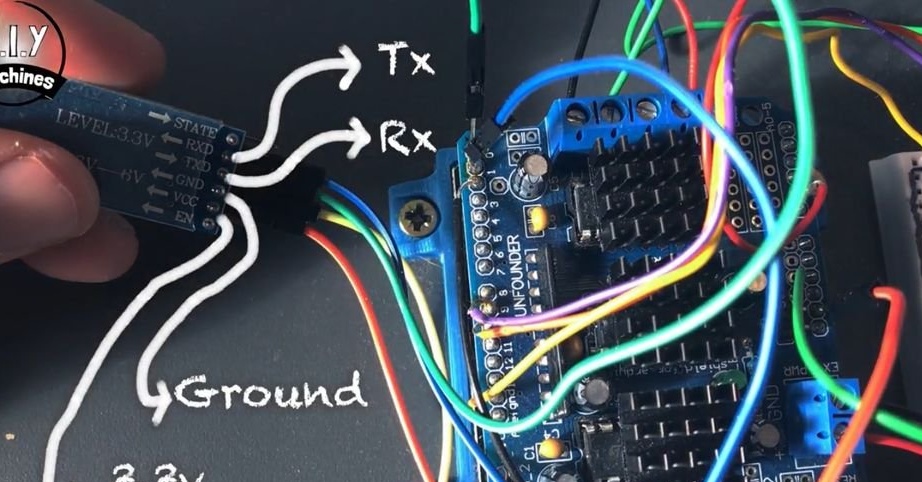
Passo diciotto: modulo bluetooth
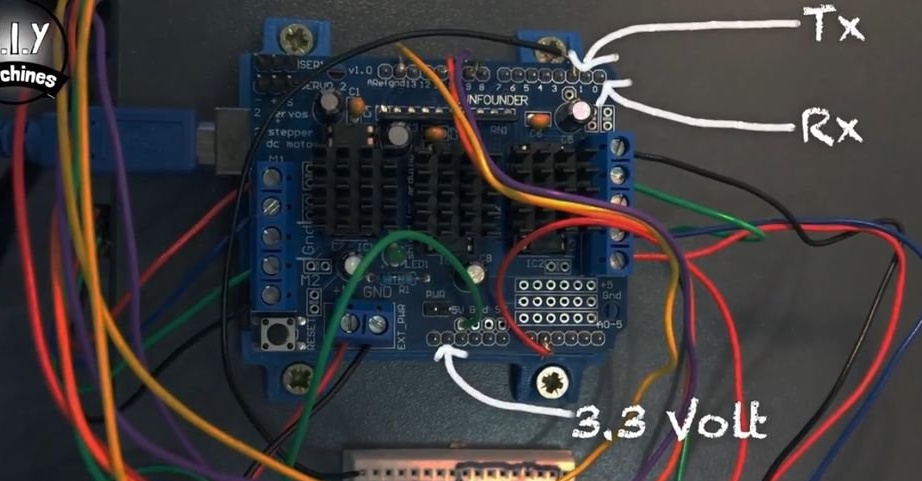
Per controllare il barista dal gadget, il master ha installato un modulo Bluetooth. Il modulo si collega come segue.
HM10 -> Arduino Shield
RXD ------> TX
TXD -------> RX
GND ------> Terra
VCC ------> 3.3V

Il master ha uno smartphone con iOS. Per questo sistema, scarica "hm10 bluetooth serial lite" dal negozio di applicazioni. Quindi stabilisce le connessioni ed entra nelle impostazioni.

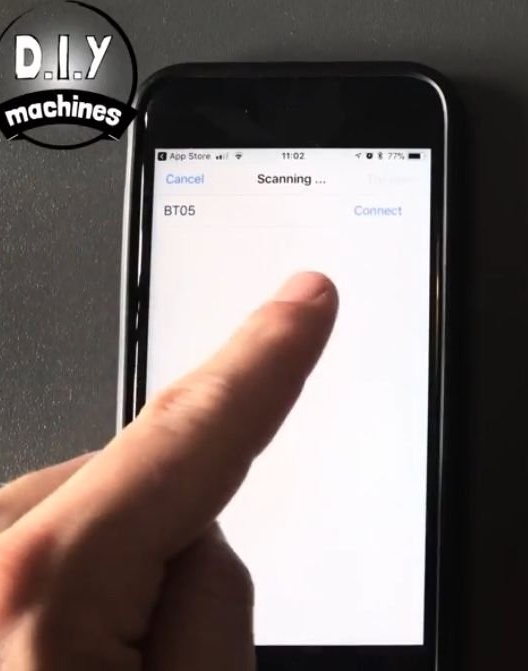
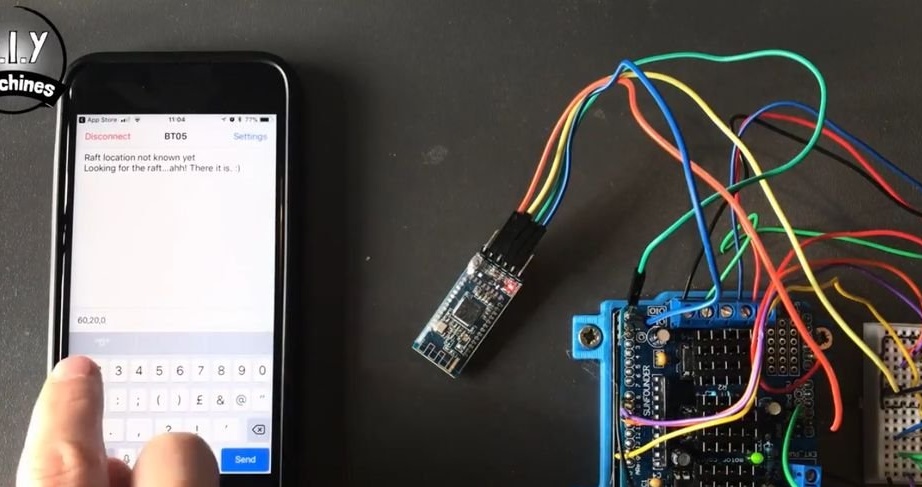
Tutto è pronto e per informazioni più complete alcuni video.