Il maestro è da tempo interessato ai modelli di aeromobili. Dapprima fu un modello di aereo, poi quadrocopter. In questo articolo, la procedura guidata ti dirà quali materiali scegliere per un quadrocopter e come realizzare una cornice in compensato. Guardiamo un breve video dimostrativo.
Per creare un quadrocopter, il master ha utilizzato quanto segue
Strumenti e materiali:
-Birch compensato;
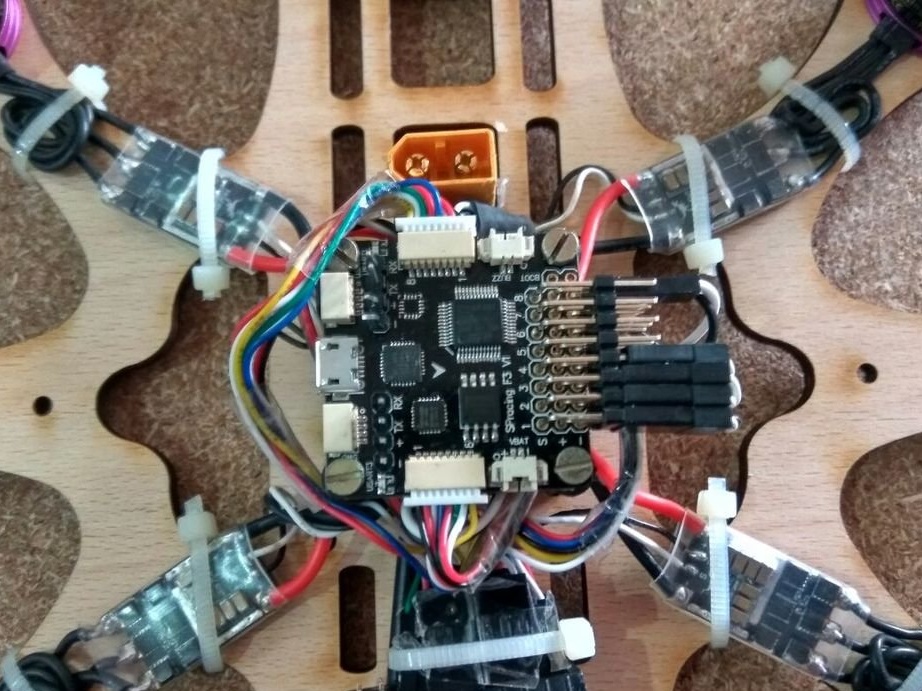
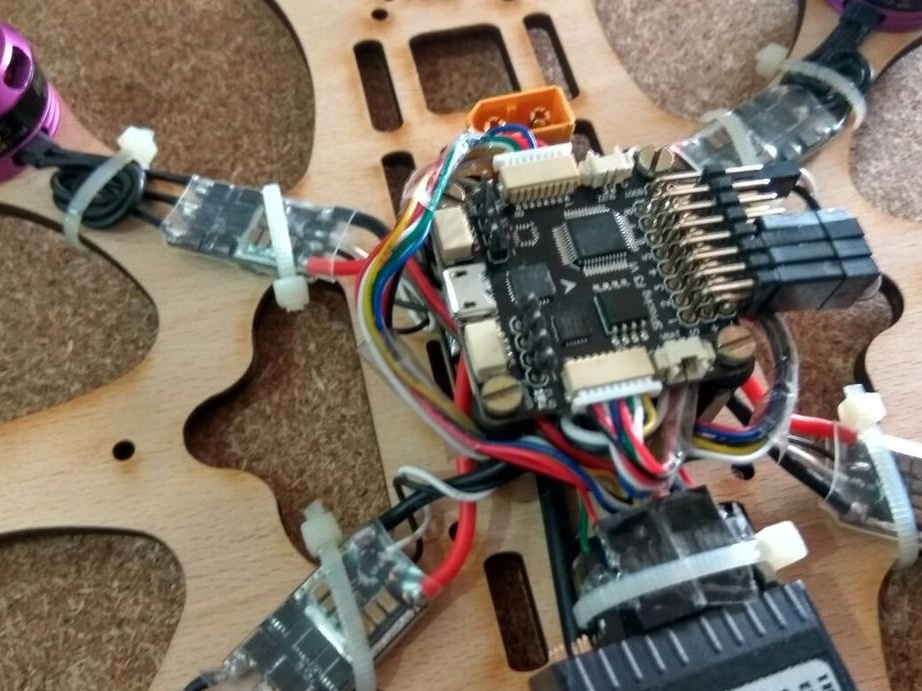
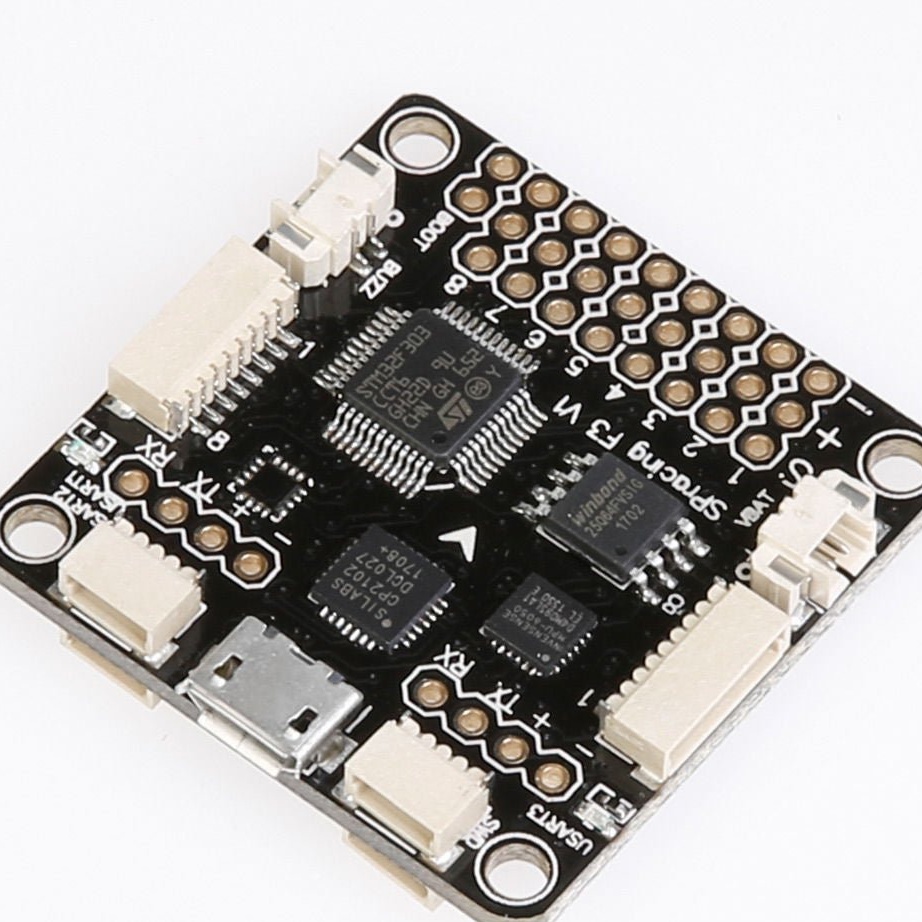
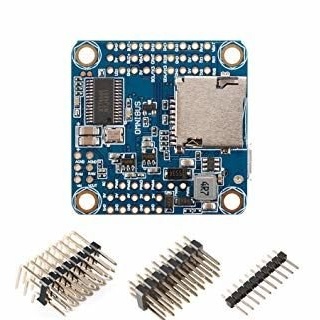
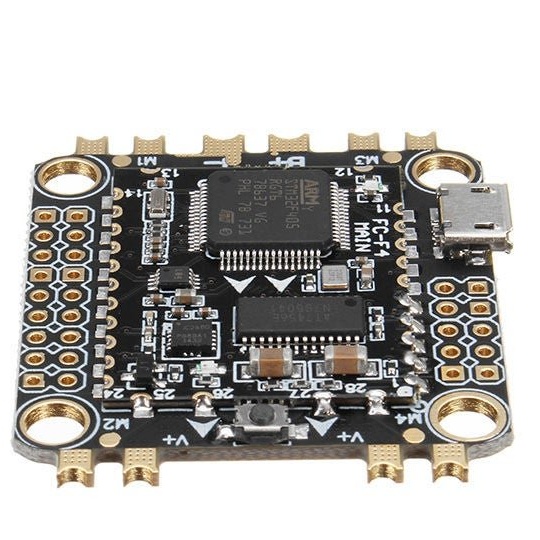
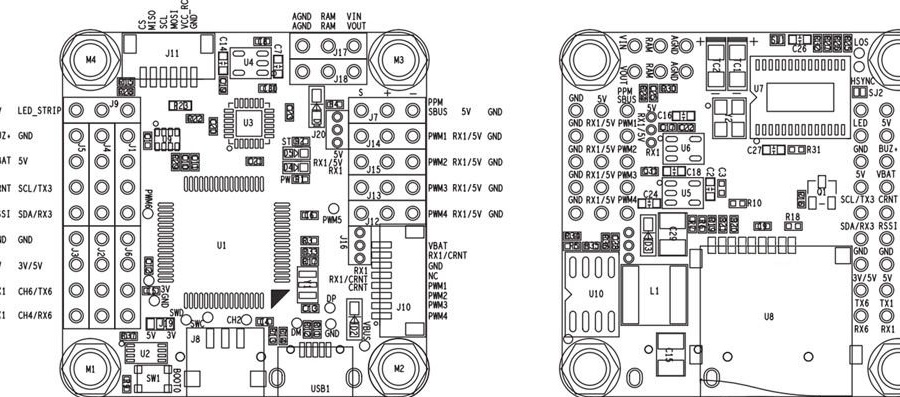
-Controller Omnibus F4, SP Racing F3;
-Mateck scheda di distribuzione dell'alimentazione;
- Controller HGLRC 28A BLHeli ESC - 4 pezzi;
- Motor Racestar BR2204 2600Kv Racing Edition -4 pezzi;
- Eliche KingKong 5X4X3 - 4 pezzi;
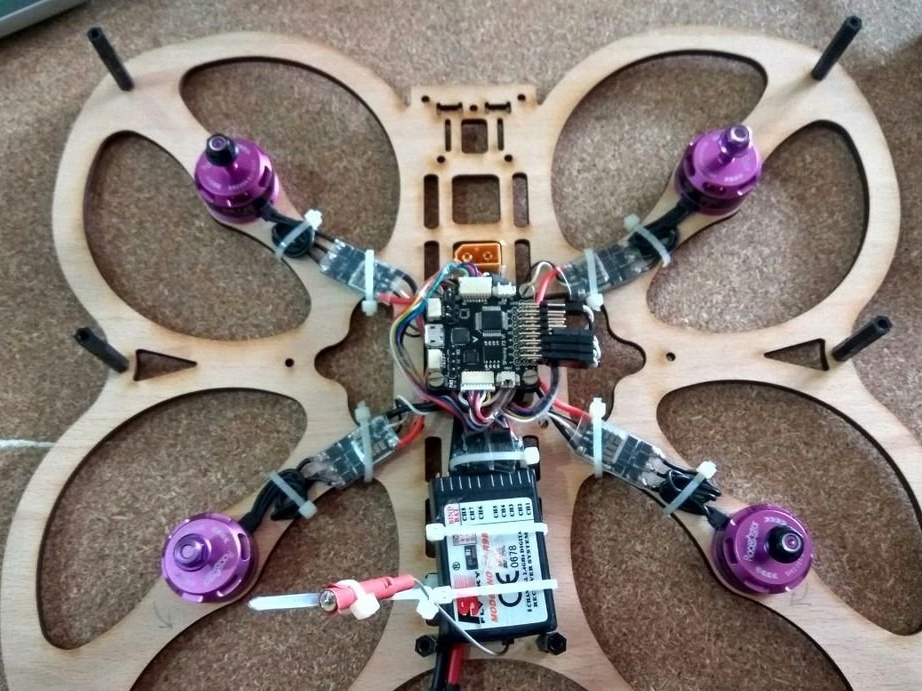
- Modulo radio Flsky TH9X con ricevitore;
Batteria Gens 3800 mAh;
resistente; - 16 pezzi;
-Viti M3;
- cacciavite;
-Accessori per saldatura;
-Nozh;
- taglierina CNC;
Primo passo: selezione del materiale
Frame.
Di solito il telaio è costituito da componenti leggeri e rigidi, come fibra di vetro, fibra di carbonio, legno, alluminio, ecc. Esistono molti tipi diversi di telai, il master creerà un telaio per quattro motori.
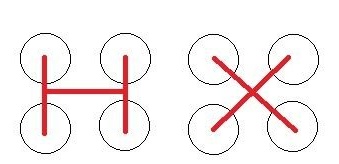
Tali frame sono principalmente nella forma H o X. La forma a X è un buon equilibrio tra stabilità e manovrabilità. È questa cornice che farà il maestro.

Controller.
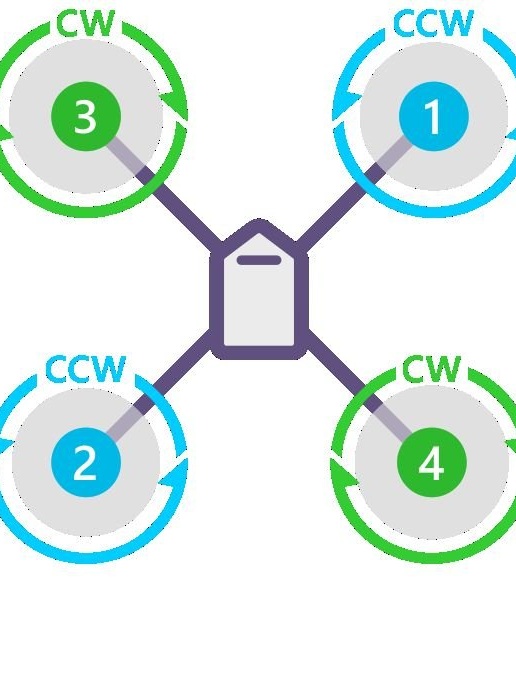
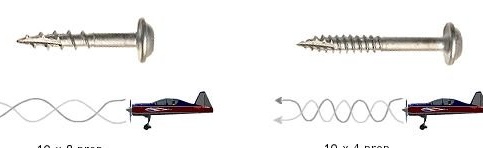
Il controller controlla il funzionamento dei motori. Il diagramma mostra che tutti i motori ruotano in direzioni opposte per neutralizzare la coppia generata da ciascun motore. Il controller è il cervello di un quadrocopter, è fondamentalmente un piccolo computer che utilizza i suoi sensori per misurare costantemente angolo e velocità.
I controllori di volo sono classificati principalmente in base alle specifiche del processore.

Motori.
Esistono due tipi di motori, motori brushless e motori brushless. La maggior parte dei quadrocopter utilizza motori brushless in grado di rispondere molto rapidamente ai cambiamenti nei requisiti di velocità e coppia. Per motori brushless, speciali elettronico regolatore di velocità (ESC).
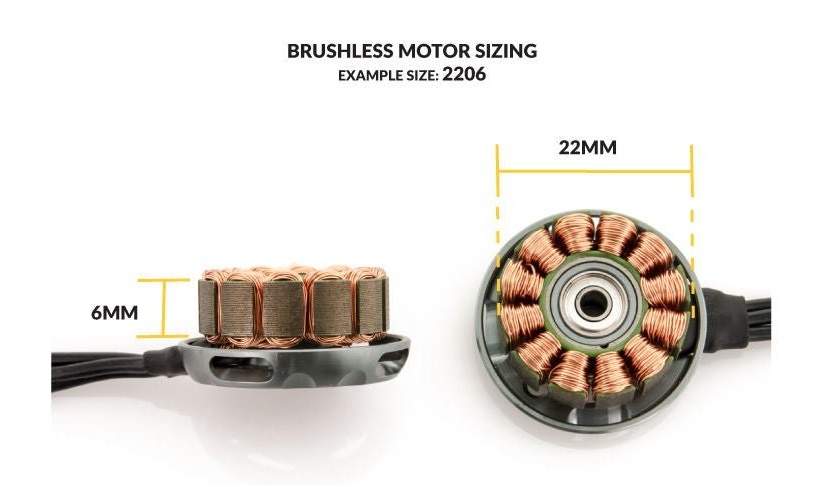
La dimensione dei motori brushless è indicata da un numero di 4 cifre - AABB. "AA" è la larghezza dello statore e "BB" è l'altezza dello statore o il diametro dello statore, entrambi in mm (millimetri). Ad esempio, Racestar BR2205 ha uno statore con un diametro di circa 22 mm e un'altezza di circa 05 mm.
Infatti, maggiore è lo statore, maggiore è la potenza a velocità più elevate e maggiore è lo statore, maggiore è la coppia a velocità inferiori.
Il valore KV del motore indica la velocità alla quale il motore ruoterà quando si applica 1 volt ai suoi avvolgimenti.È determinato dal numero di avvolgimenti del filo di rame nello statore del motore e dalla forza magnetica dei magneti.
Meno avvolgimenti significano meno resistenza e quindi un numero di giri più elevato. Questo è il motivo per cui i motori con KV più elevato tendono ad avere meno avvolgimento dello statore.
KV determina quale vite è possibile utilizzare con il motore. Più basso è il KV, più grande è la vite che può ruotare e viceversa. Non è possibile aumentare la forza di sollevamento installando una vite più grande sul motore con un KV più elevato, poiché i requisiti di coppia andranno oltre la potenza consentita e il motore si surriscalda.
Ad esempio: i motori BR2205 da 2600 kV possono funzionare con viti da 5x4 pollici e i motori BR2212 da 1000 kV possono funzionare con viti da 10x4,5 pollici
Il KV non è in alcun modo un indicatore della potenza del motore; i motori con un KV più alto non sono necessariamente più potenti dei motori con un KV più basso.


Regolatori di velocità elettronici (ESC).
I recenti progressi nel campo dei mini quadrocopter sono diventati possibili grazie alla comparsa di piccoli regolatori di velocità elettronici che consentono il funzionamento di motori brushless. Il funzionamento dei regolatori di velocità elettronici consiste nel ricevere il segnale dell'acceleratore dal controllore di volo e mantenere la rotazione del motore alla velocità richiesta.
Numerose tecnologie funzionano all'interno di questi piccoli dispositivi che vanno oltre lo scopo di questo manuale. Al momento dell'acquisto, scegliere un ESC con una corrente continua nominale di almeno il 20% in più rispetto a quella calcolata.


Eliche.
Le eliche convertono l'energia meccanica dei motori in trazione. Le dimensioni e la forma dell'elica svolgono un ruolo importante nell'efficienza di volo.
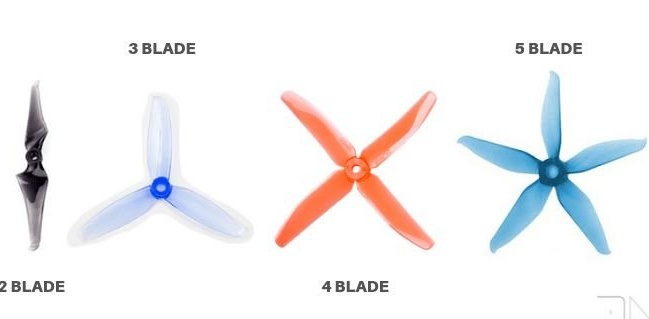
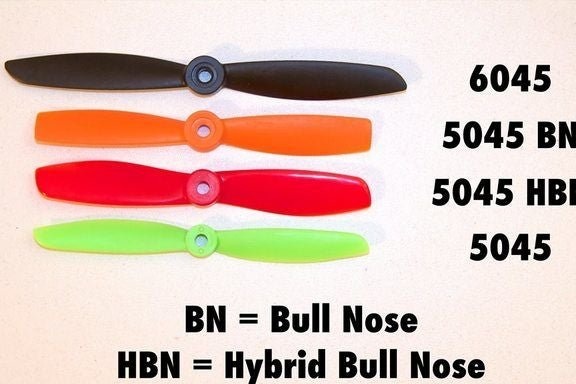
Esistono 2 tipi di formati utilizzati dai produttori: L x P x B | LLPP x B. Dove, L è la lunghezza, P è il passo, B è il numero di pale.
Le eliche possono essere realizzate in vari materiali, come composito di plastica, fibra di carbonio, legno, ecc. Ogni tipo di materiale ha caratteristiche uniche, ad esempio la fibra di carbonio e il legno sono molto rigidi e noti per il loro funzionamento regolare, e alcune materie plastiche sono estremamente resistenti. La maggior parte delle viti utilizzate nei mini quadrocopter sono composte di plastica.
Le dimensioni dell'elica che è possibile utilizzare sono limitate dalle dimensioni del telaio e dalla potenza HF del motore. Di norma, più elica è possibile utilizzare per creare una certa spinta, più efficace sarà. Per i mini quadrocopter, variano tra viti da 5-6 pollici con incrementi di 4-5 pollici.
Il numero di pale influenza la trazione e il consumo di energia. Più pale, più trazione e più energia viene sprecata.

Batteria.
Attualmente, la maggior parte dei droni utilizza batterie ai polimeri di litio, comunemente note come batterie Lipo. La batteria, insieme all'ESC e al motore, è un sistema di alimentazione quadricottero.
Non pensare alla batteria come a un serbatoio di energia, i motori possono tirare una quantità mostruosa di ampere a intervalli molto brevi. Le batterie LiPo sono un insieme di celle, ognuna delle quali ha una tensione nominale di 3,7 V. Se è richiesta una tensione più elevata, queste celle possono essere collegate in serie per formare una batteria. Le batterie collegate in serie sono contrassegnate con la lettera "S" e in parallelo con la lettera "P".
Più celle sono collegate in serie, maggiore è la tensione e più celle in parallelo, maggiore è la capacità.
Per esempio:
1S = 1 cella = 3,7 V
2S = 2 celle = 7,4 V
3S = 3 celle = 11,1 V
4S = 4 celle = 14,8 V
5S = 5 celle = 18,5 V
6S = 6 celle = 22,2 V
La capacità è indicata in milliampere o "mAh". Questo è il numero di ampere che una batteria può erogare in un'ora. Ad esempio, una batteria da 3S 2000 mAh può fornire 2 A per 1 ora. quindi se il tuo quadricottero tira 20A, il suo volo continuerà per 2/20 * 60min = 6 minuti.
La scarica nominale indica la velocità massima alla quale è possibile assorbire corrente dalla batteria. È indicato dal numero "C" in alto. Maggiore è il rating C, maggiore è la quantità di corrente che la batteria può fornire.
Ad esempio, una batteria da 2000 mAh 25C può fornire fino a 2000x25 = 50.000 mA o 50 A.



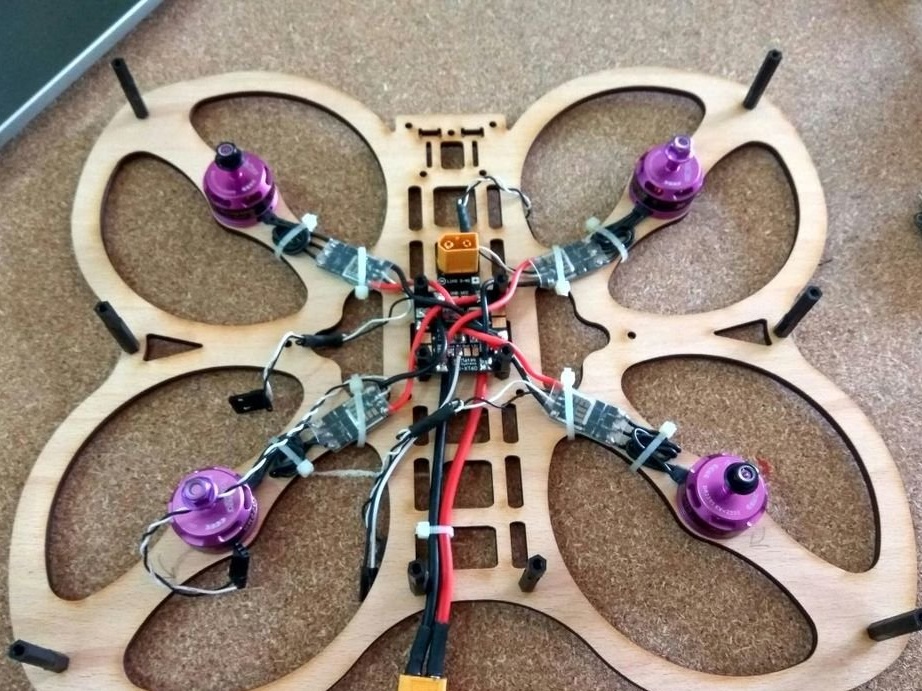
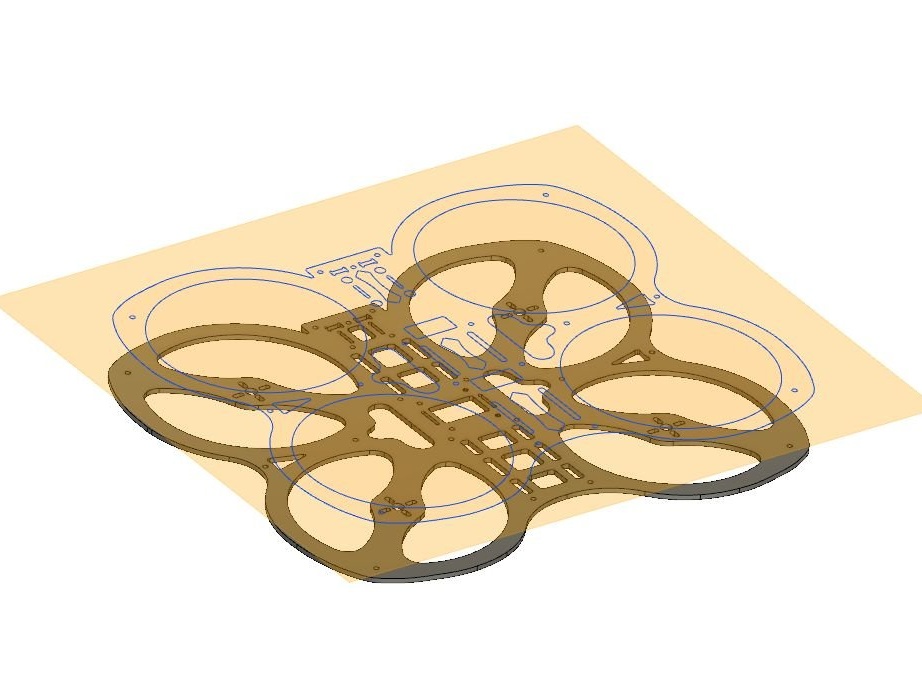
Fase due: progettazione e assemblaggio del telaio
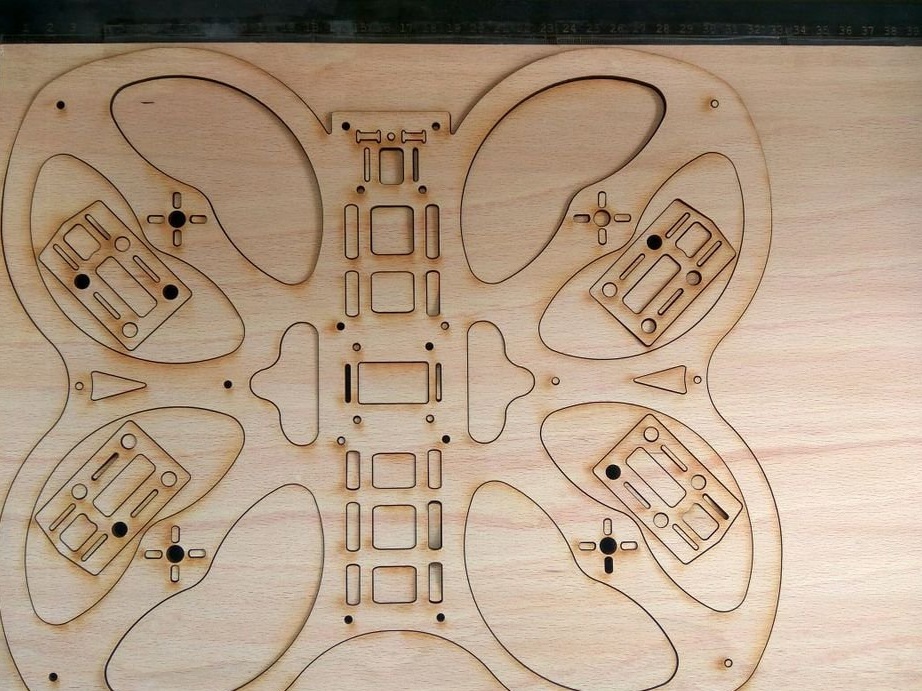
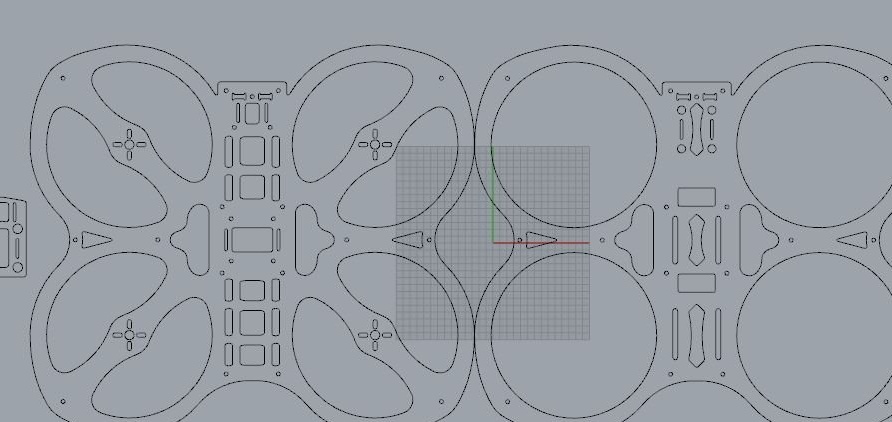
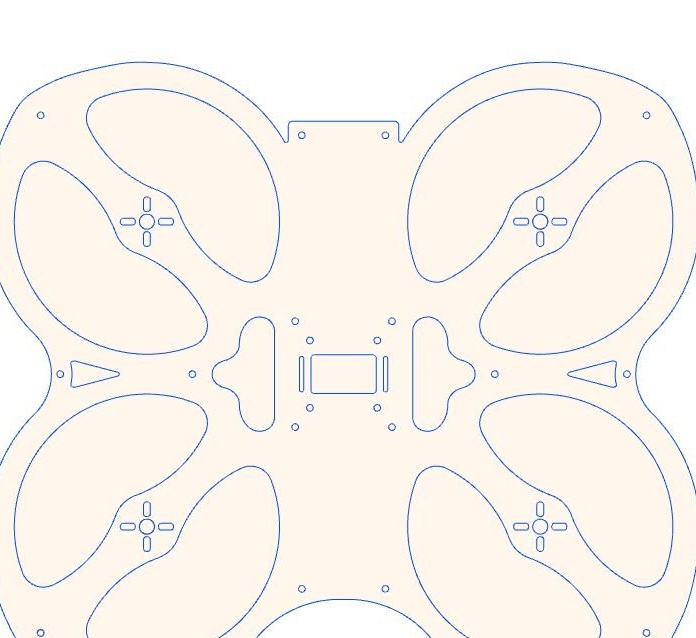
Il design del telaio è stato ispirato dalla forma a farfalla monarca.Quando guardi la cornice dall'alto, sembrano due ali.
La procedura guidata ha disegnato il design in Fusion 360 e Rhino CAD. La dimensione del telaio è di circa 230 mm, è dovuta alla distanza diagonale da un mozzo del motore a un altro. Le dimensioni del telaio più popolari sono 210 mm, 250 mm, ecc. Dopo aver impostato le dimensioni del telaio, disegnare i supporti del motore.
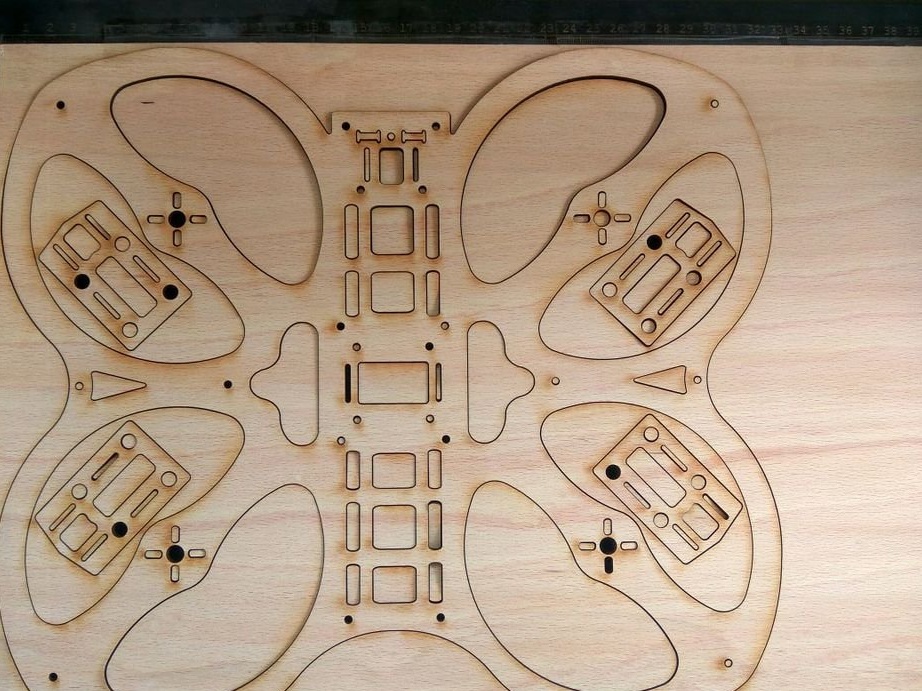
L'edificio centrale è il luogo in cui verranno installati tutti i componenti elettronici, incluso il controllore di volo, il ricevitore, la batteria, ecc. Al punto medio ci sono 4 fori M3 a una distanza di 30,5 mm l'uno dall'altro.
L'articolo è realizzato con taglio laser. Se non hai un cutter, puoi tagliare in officina. Il file per il taglio può essere scaricato di seguito.
File Design.rar









Terzo passo: costruire
Ora devi assemblare un quadrocopter.
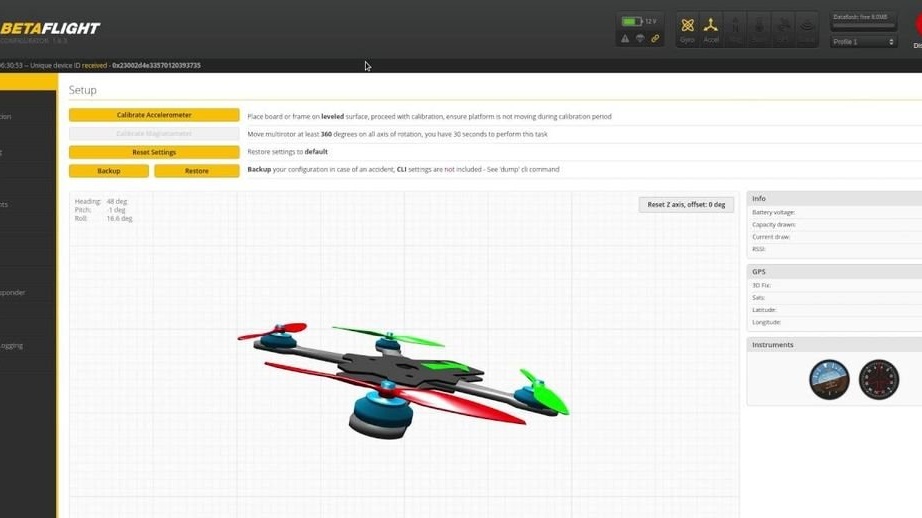
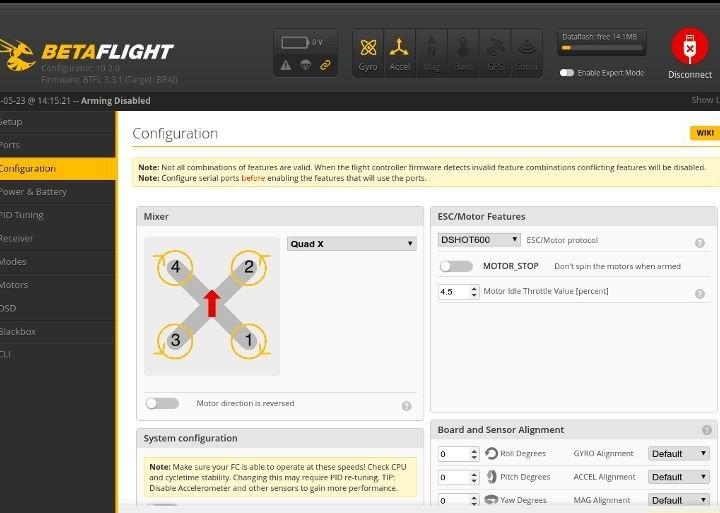
Per prima cosa devi eseguire il flashing del controller con il firmware Betaflight. Quindi calibrare il sensore. Collegare il modulo radio e verificarne il funzionamento. Montare i motori sul telaio secondo lo schema del telaio a X con il corretto senso di rotazione. Saldare il motore conduce ai terminali ESC e fissare l'ESC alla staffa. Collegare la scheda di distribuzione dell'alimentazione e saldare i pad ESC. Collegare il Soler XT60 al cavo di alimentazione, quindi alla scheda di distribuzione dell'alimentazione. Correggi il controller. Collegare i fili dall'ESC al controllore di volo. Montare il ricevitore sul telaio. Metti sulla copertina superiore.