

Se stai realizzando il tuo primo quadricottero e non hai una stampante 3D, allora queste istruzioni sono per te. Sulla strada per costruire questo quadricottero, il maestro realizzò sette modelli e ognuno aveva i suoi difetti significativi. Alla fine, è stato in grado, attraverso tentativi ed errori, di farlo funzionare il modello.
Strumenti e materiali:
- Compensato con uno spessore di 7 mm e una dimensione di circa 30 x 22 cm;
- Tubo profilato in alluminio 25 * 25 mm - 1 metro;
-Izolenta;
-Krepezh;
-Latch thread;
-Accessori per saldatura;



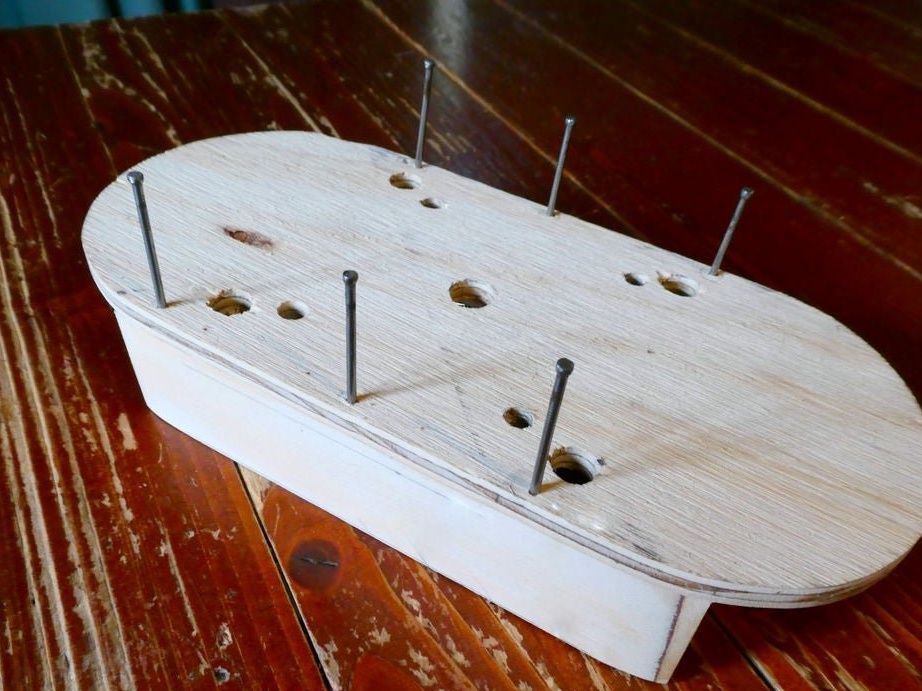
Primo passo: il caso
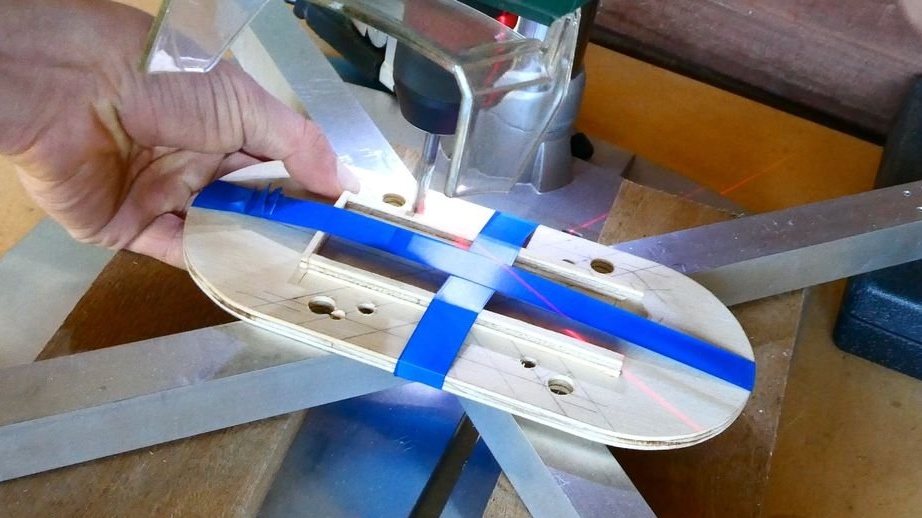
tipo sagoma e incollarlo sul compensato. Tagliare le parti e praticare tutti i fori.
Posizionare la batteria sulla base e bilanciare la base. Delinea la batteria. Incollare le strisce sui tre lati della batteria.





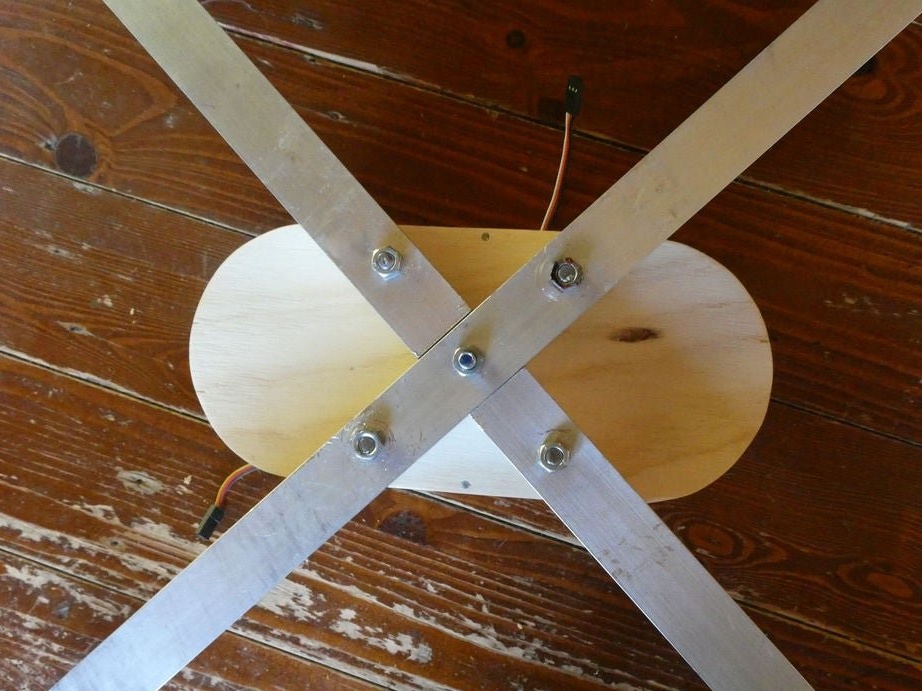
Secondo passo: Frame
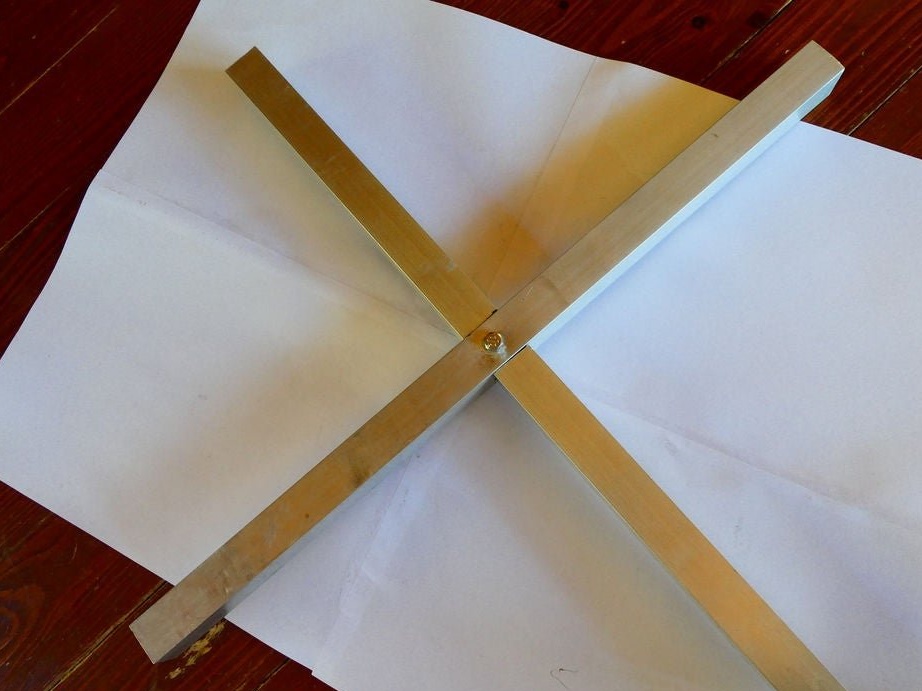
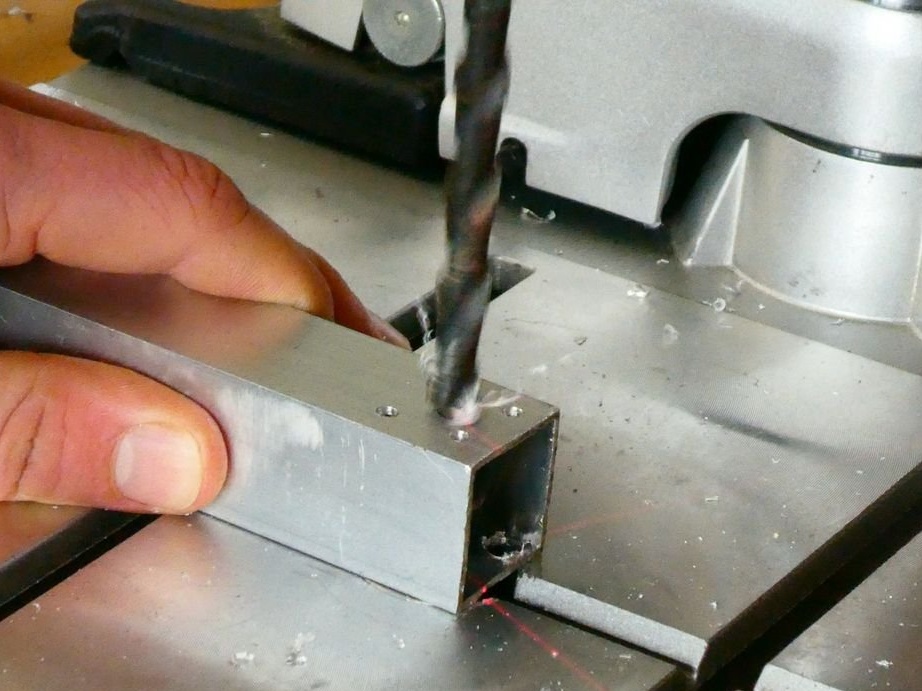
Tagliare il tubo profilato in alluminio in due parti uguali (50 cm ciascuna). Tagliare due scanalature di 2,5 cm al centro dei tubi e perforare al centro del foro. Montare la croce e fissarla con un bullone.

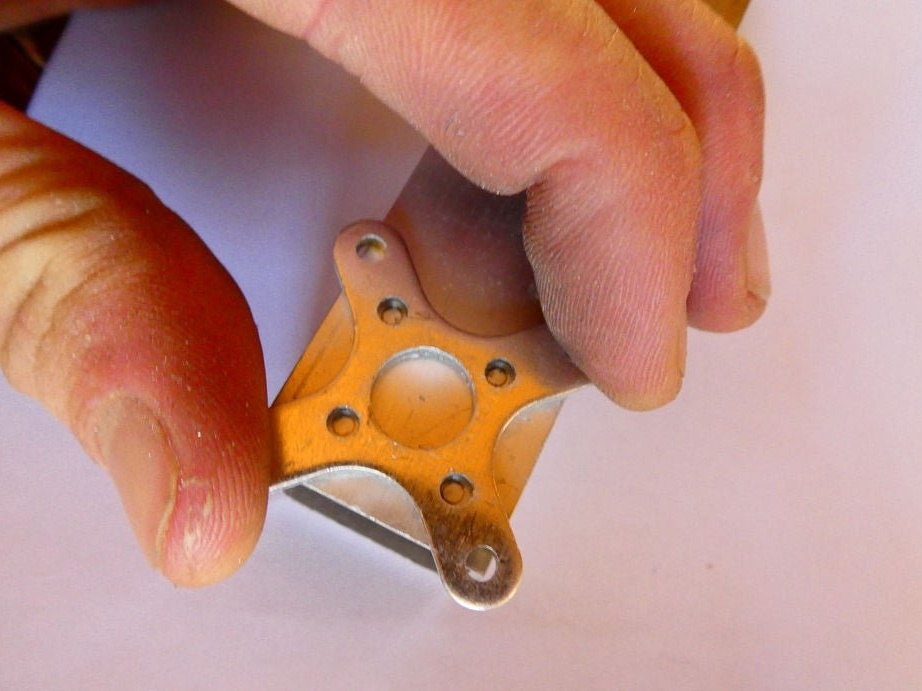
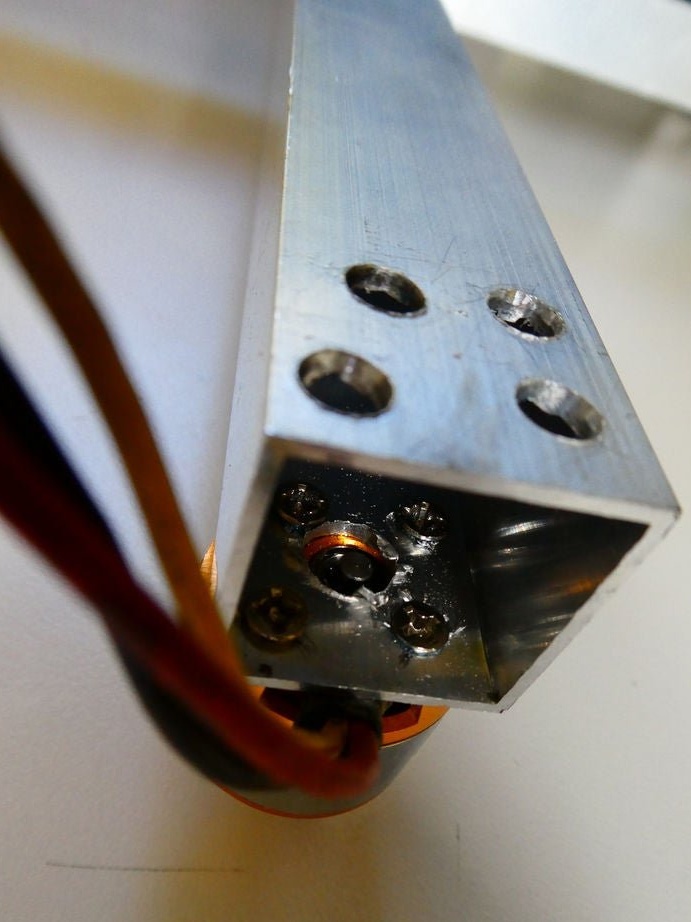
Ora usa il supporto motore in dotazione per contrassegnare i fori di montaggio. Praticare i fori. I barbi devono essere levigati.

Contrassegnare e praticare i fori di montaggio per fissare il telaio al telaio.
Incolla le strisce laterali sul corpo.

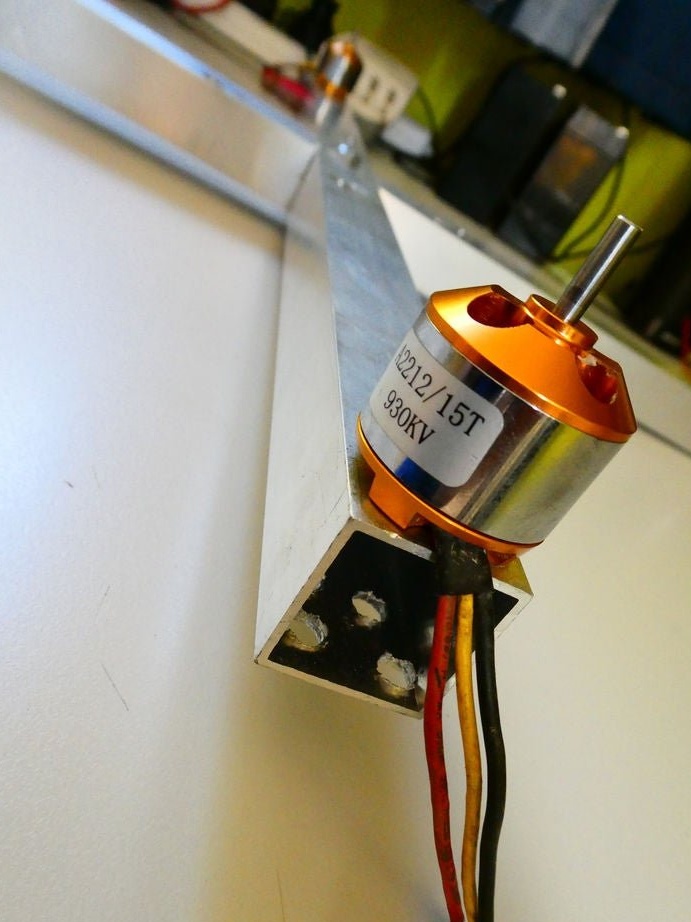
Fase tre: installazione
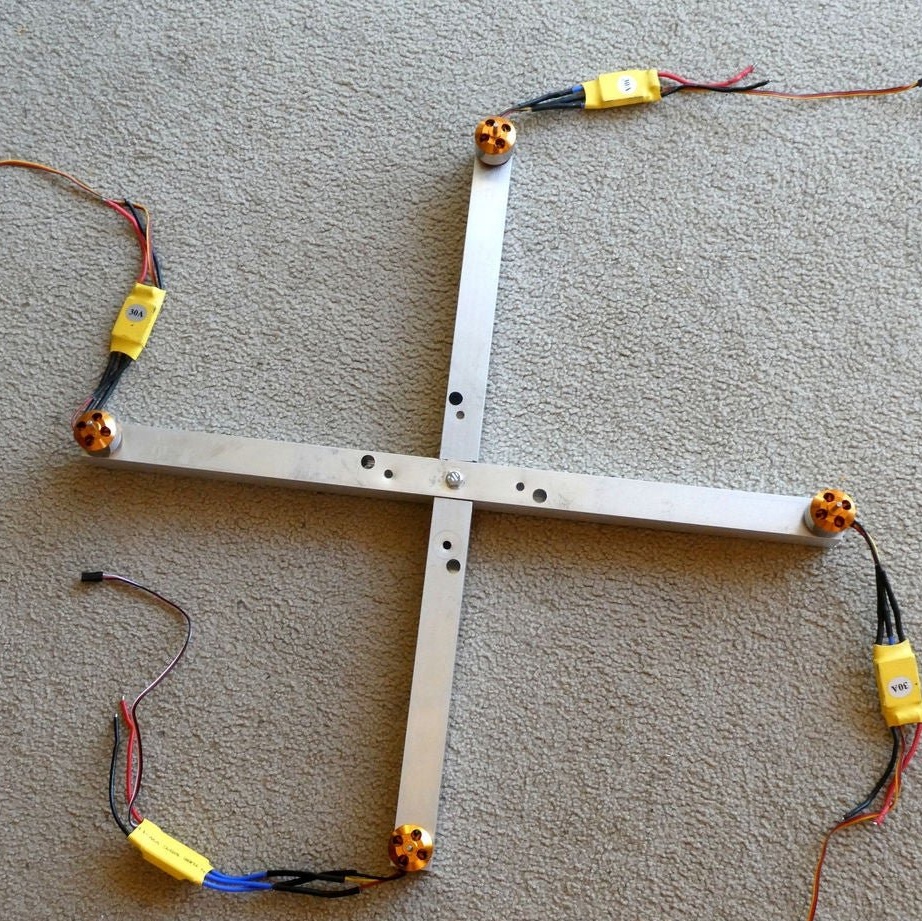
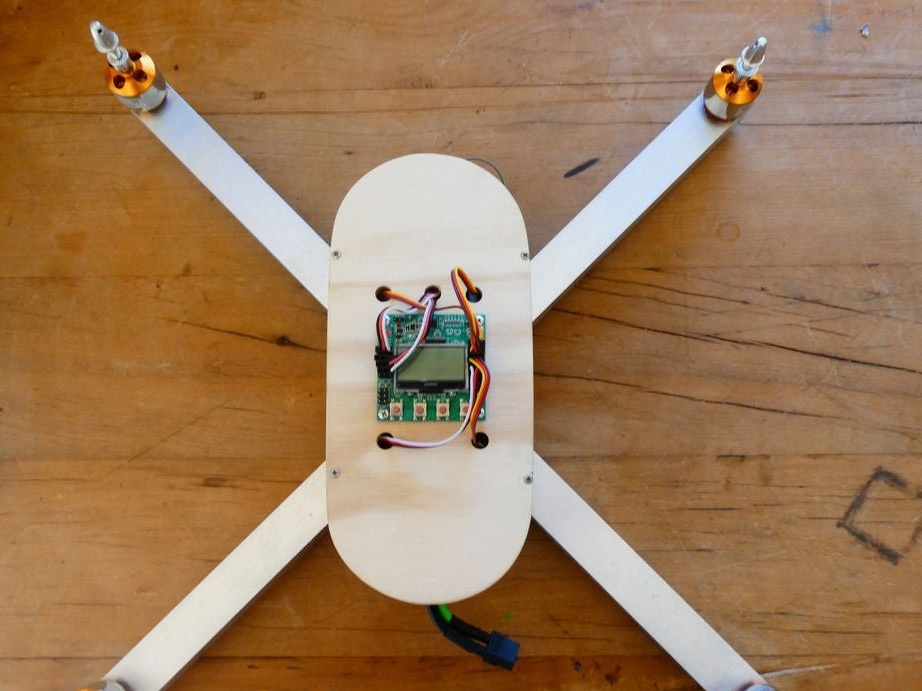
Ora devi riparare i motori sul telaio. È assolutamente necessario applicare un blocco filettato alle viti di fissaggio, altrimenti le viti verranno svitate e i motori voleranno via.
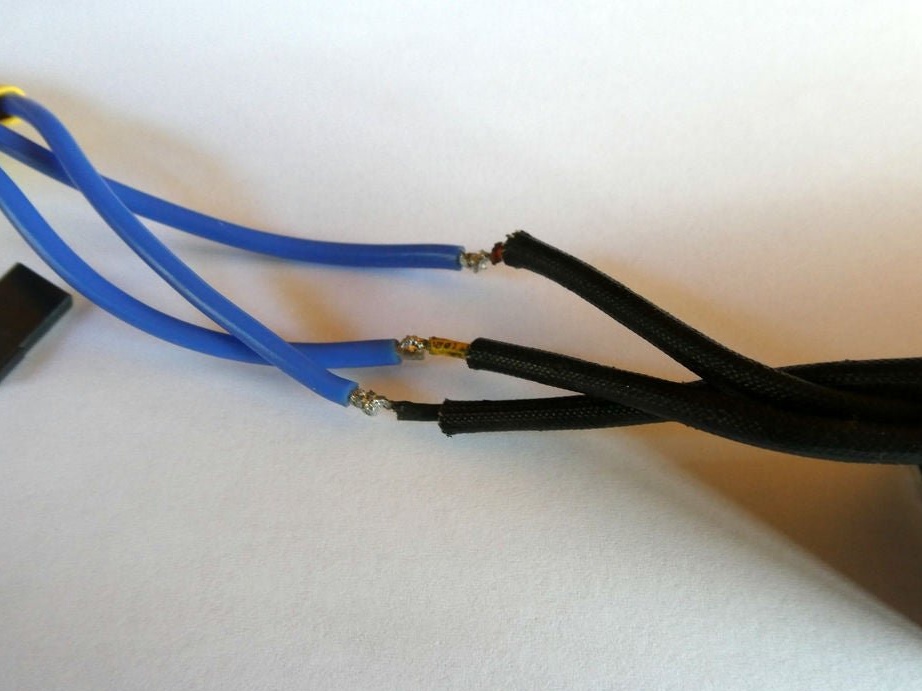
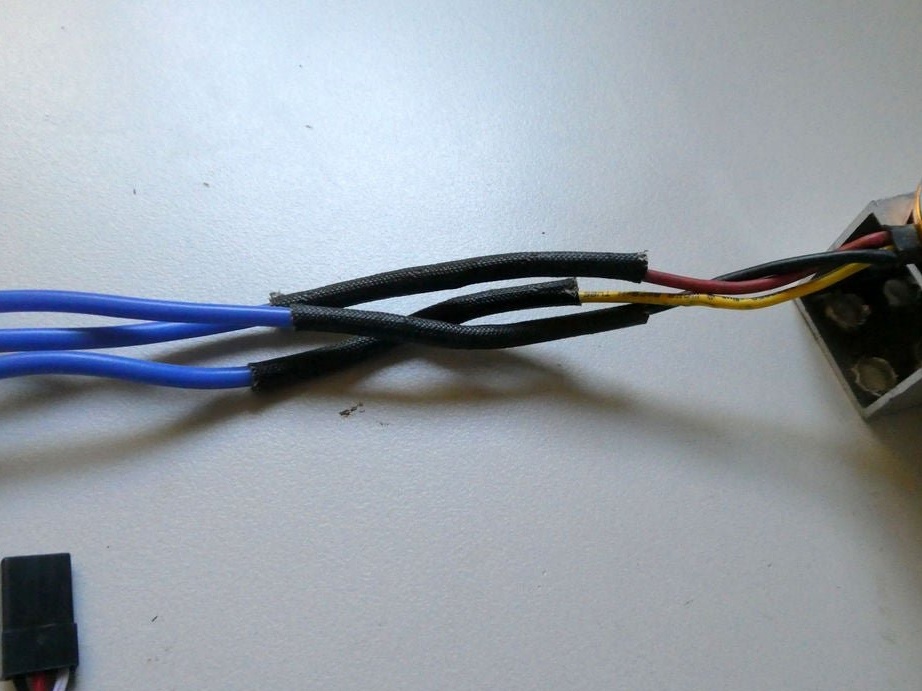
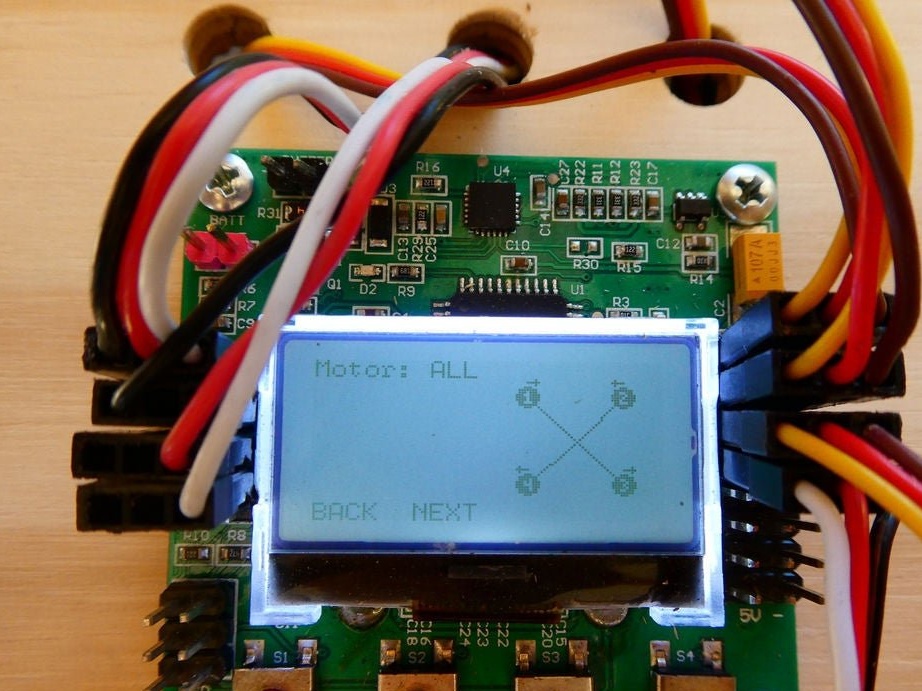
Collegare l'ESC ai motori in modo che il motore in alto a sinistra ruoti in senso orario, il motore in alto a destra ruoti in senso antiorario, il motore in basso a destra ruota in senso orario e il motore in basso a sinistra ruota in senso antiorario. Per modificare il senso di rotazione dei motori, scambiare uno qualsiasi dei tre fili. Isolare le connessioni.
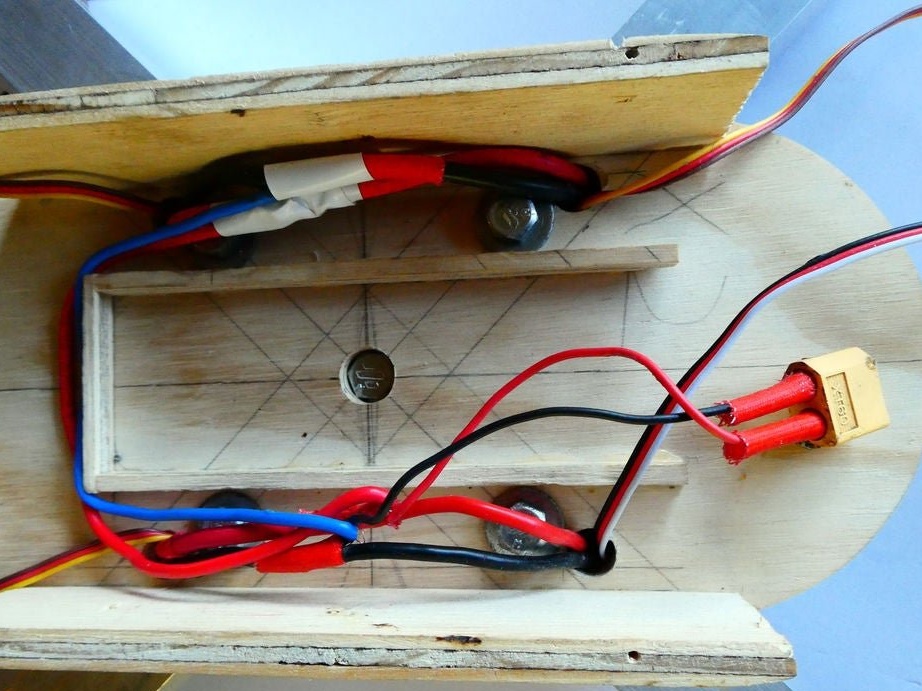
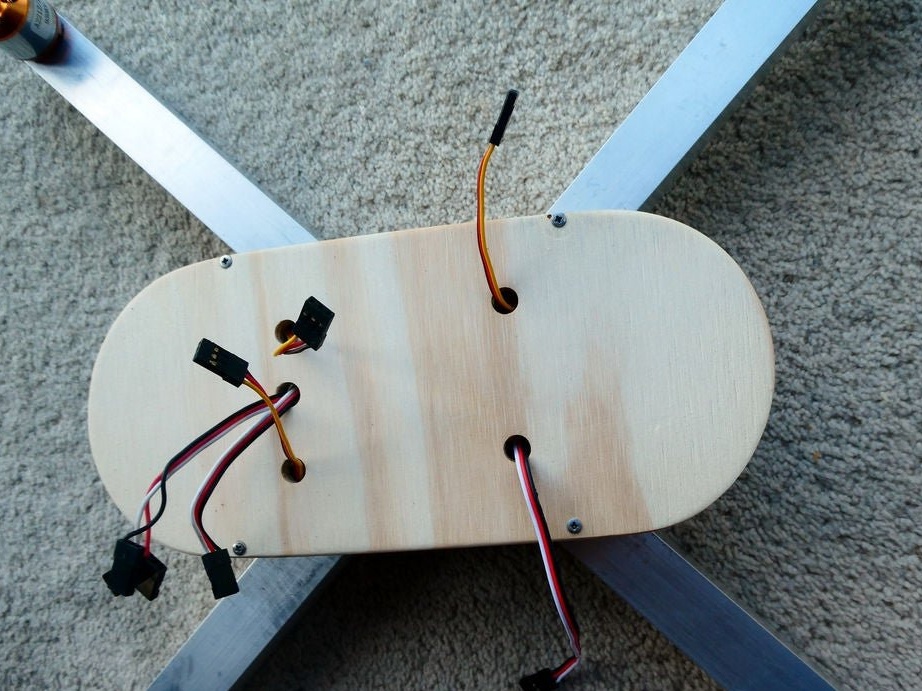
Tirare i fili attraverso il telaio e tirare nel foro, ESC è fissato all'interno dei tubi del telaio.

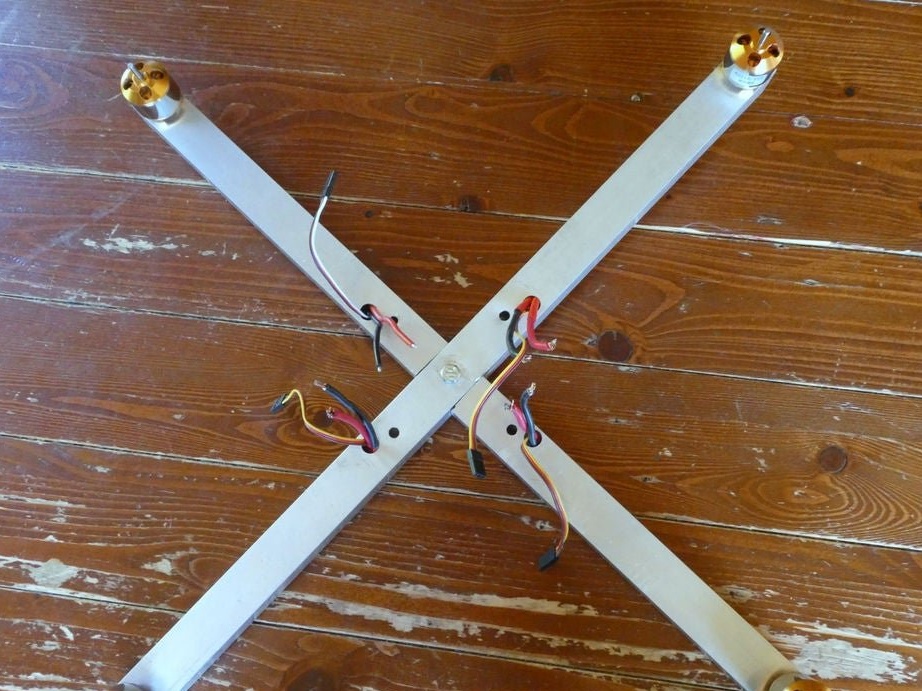
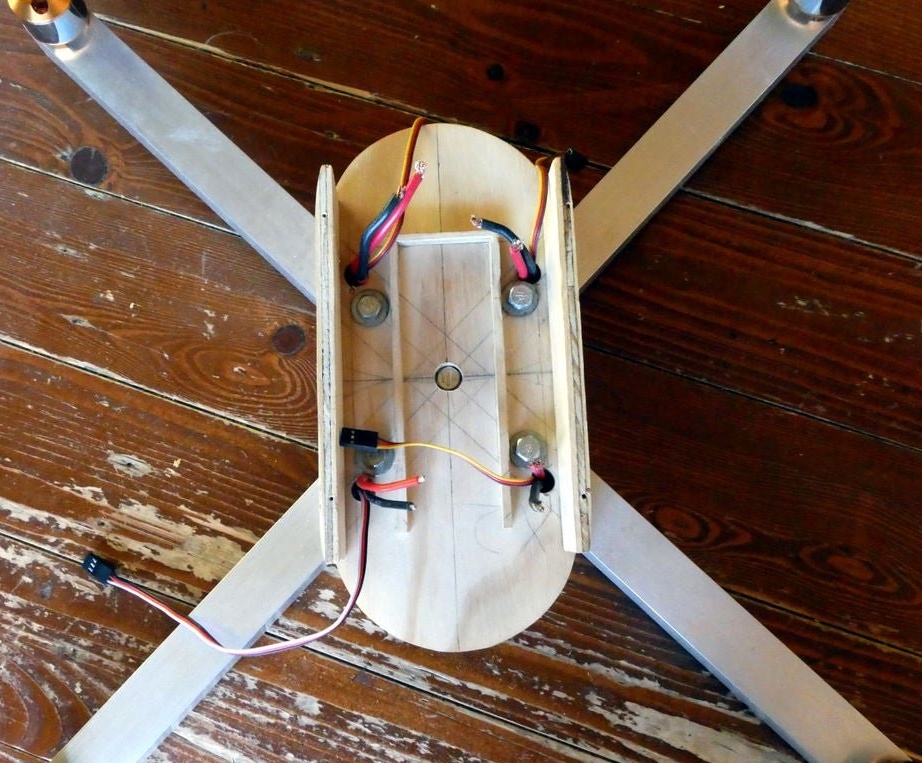
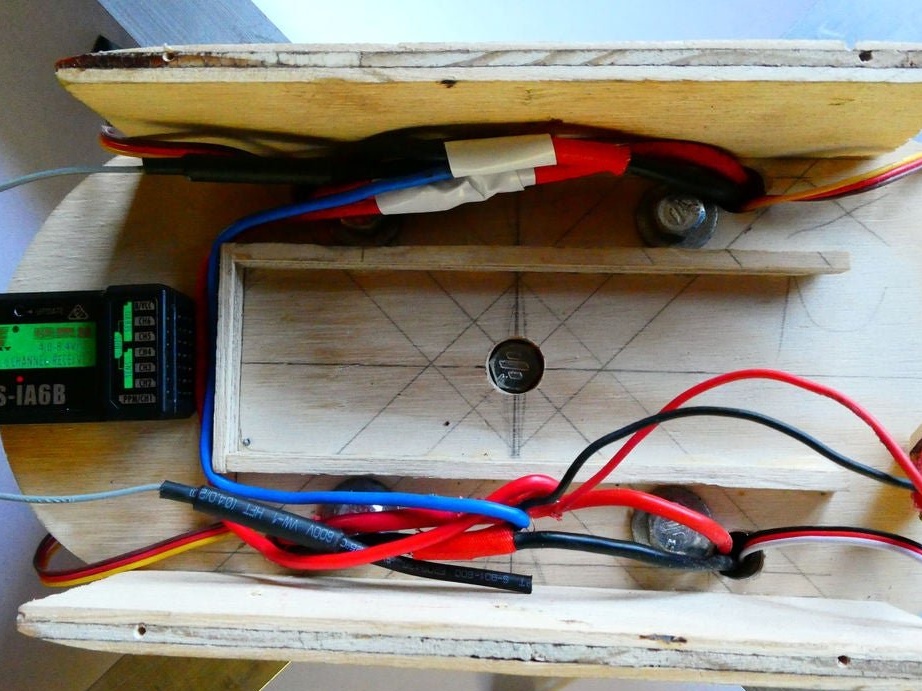
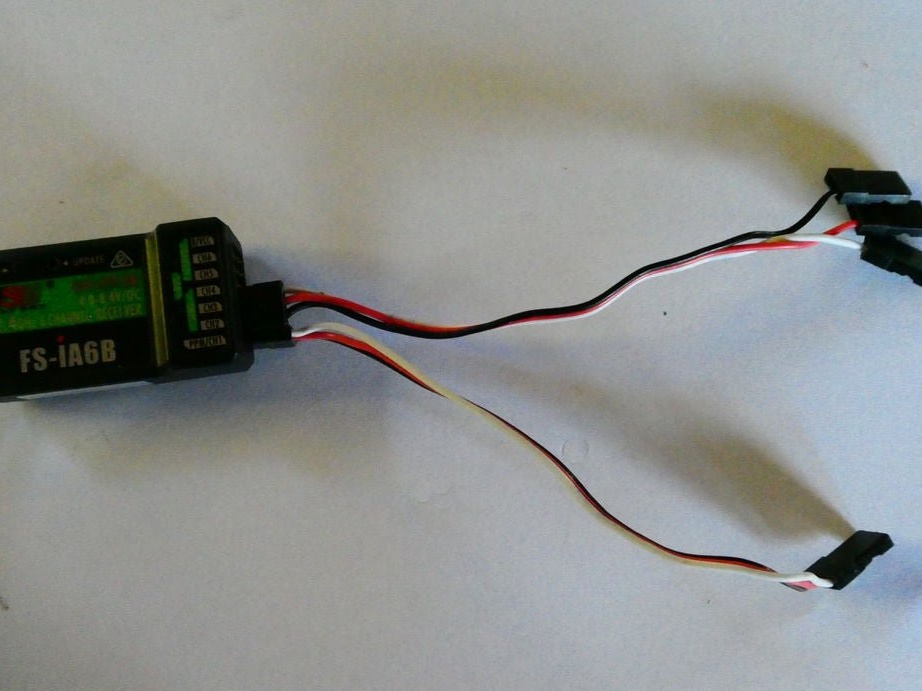
Collegare tutti i fili neri (meno) e tutti rossi (più) insieme. Saldare i due fili al connettore XT60 (rosso e nero). Fissare il ricevitore allo chassis utilizzando nastro biadesivo.
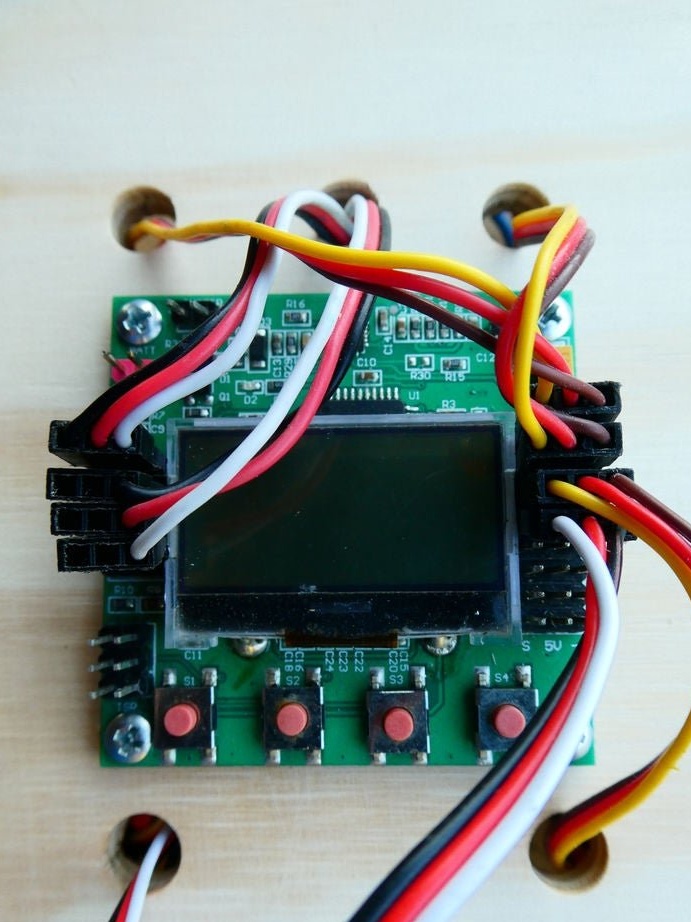
Tirare i fili dal controller e dal ricevitore attraverso i fori nel coperchio del vano, quindi avvitare il coperchio. Avvitare il controller sul coperchio. Collegare i cavi alla scheda di controllo di volo.
Quarto passaggio: installazione
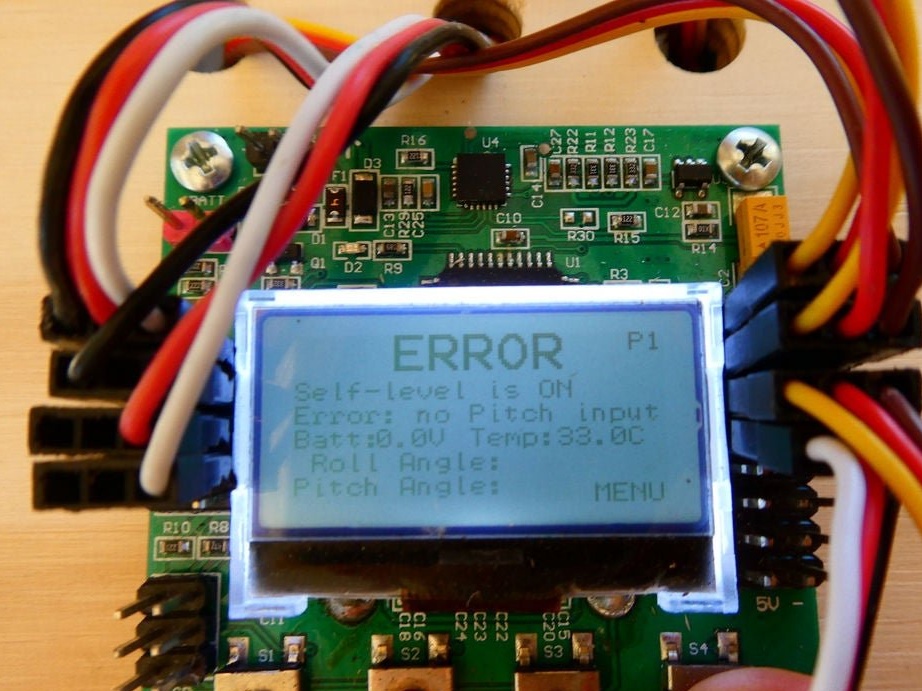
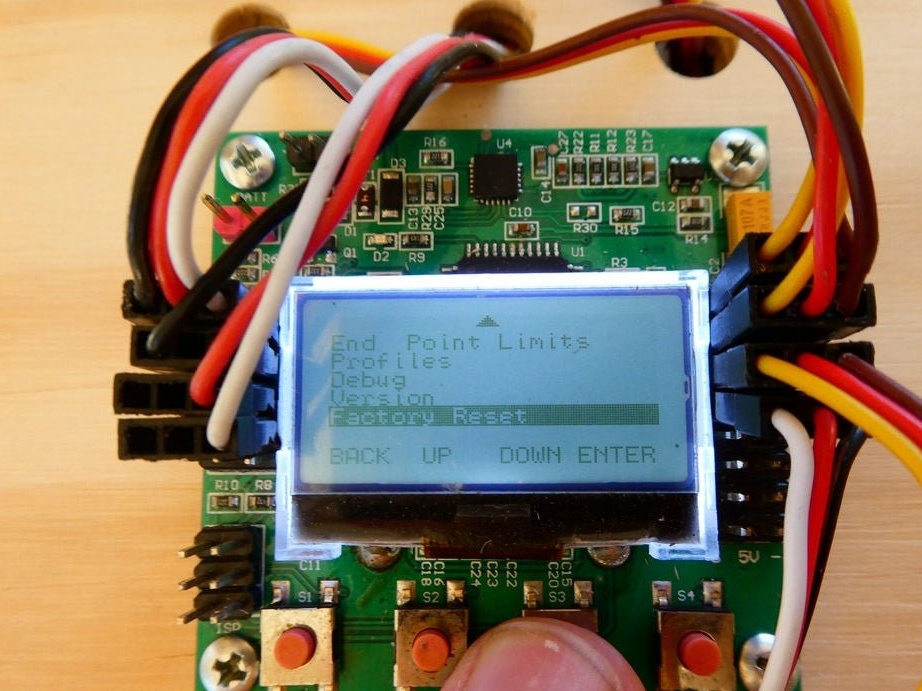
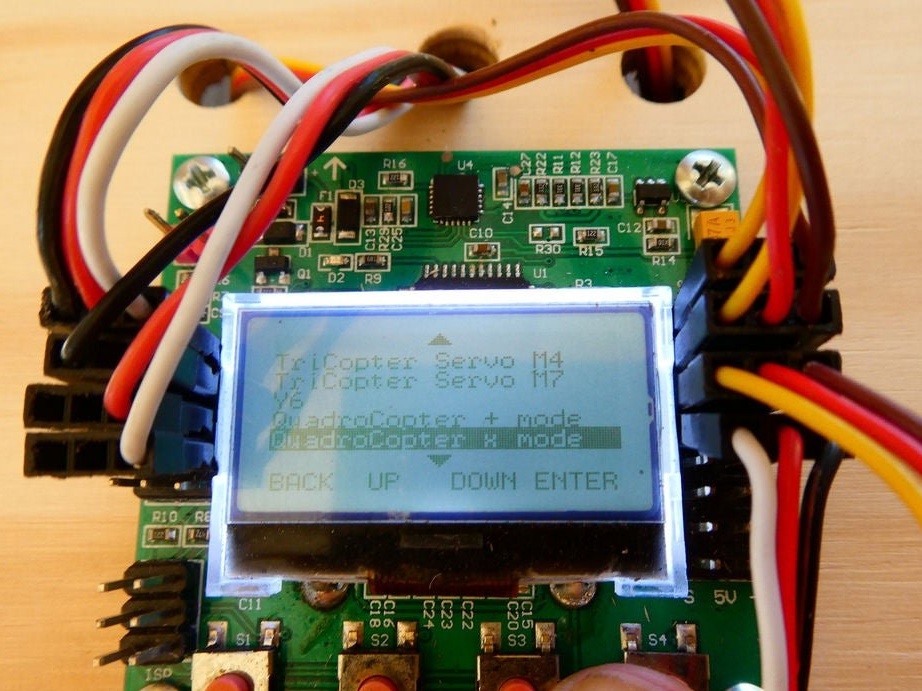
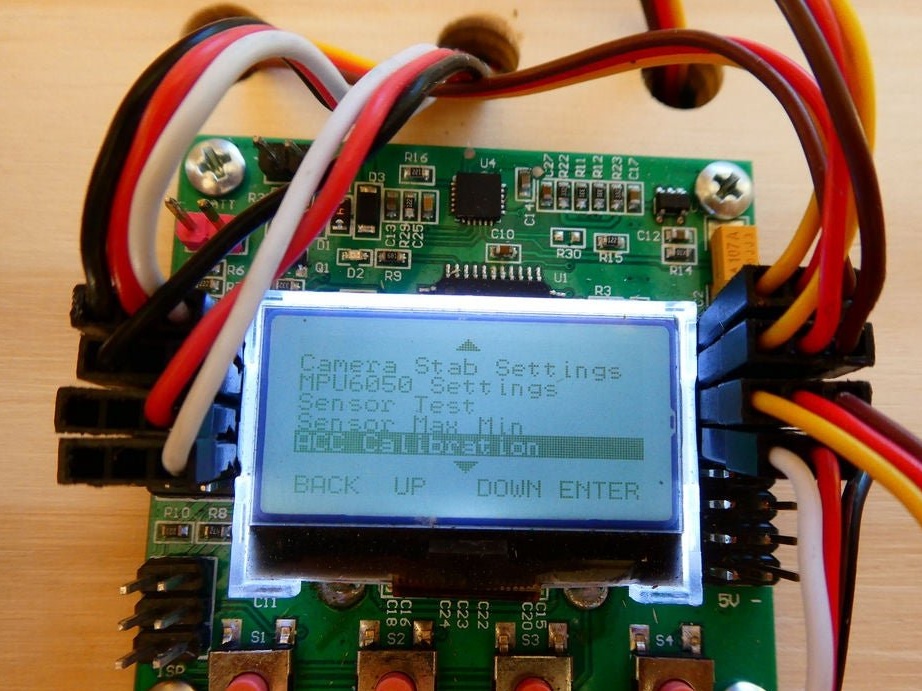
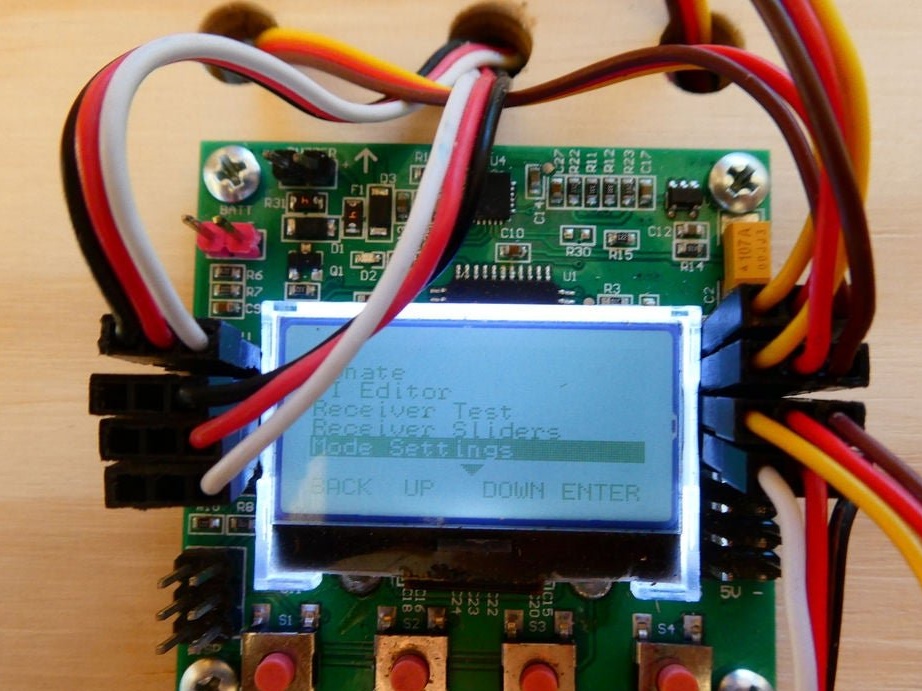
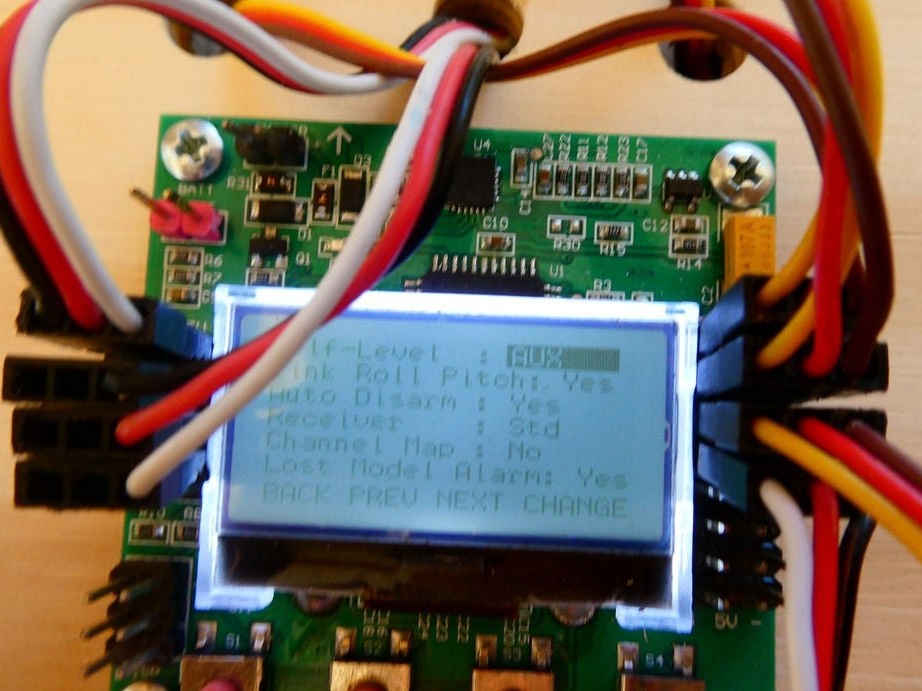
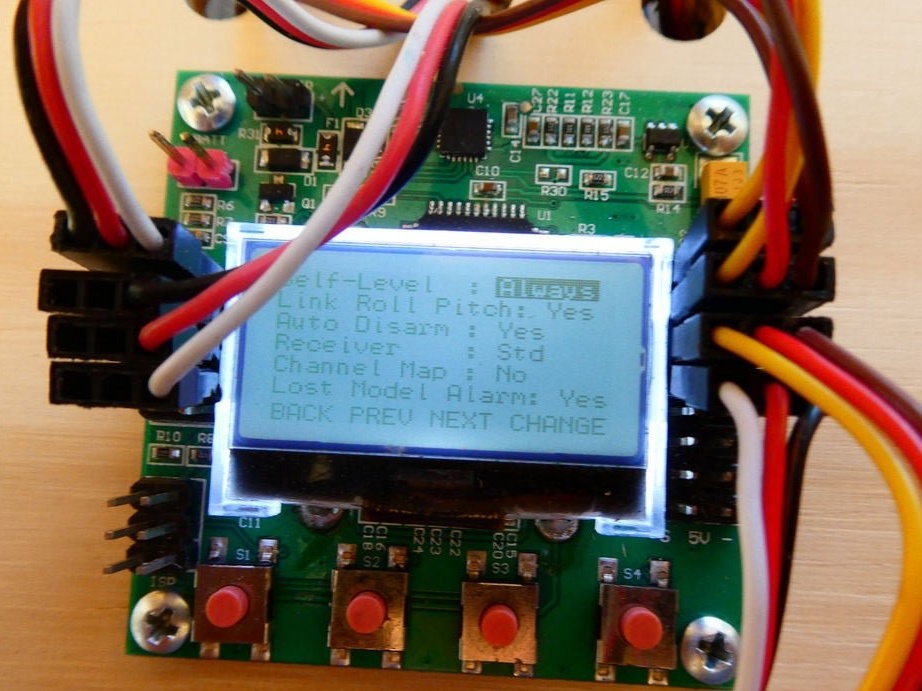
Collegare la batteria e il controller dovrebbe avviarsi. Sul display dovrebbe apparire un messaggio di errore. Ignoralo e premi il pulsante menu. Scorri verso il basso e fai clic su "Ripristina". Quindi dovrebbe apparire un menu per selezionare il frame desiderato dei droni. Scorri verso il basso fino a raggiungere la modalità Quadcopter-X e premi "accetta". Premi indietro e seleziona “Calibrazione AUX”. Posiziona il drone su una superficie piana e premi “calibrare”. Al termine, scorri verso l'alto fino alle impostazioni della modalità e cambia il livello automatico da “AUX” a “Sempre”.
Spegnere la batteria, accendere il controller, quindi ricollegare la batteria. Il controllore di volo dovrebbe accendersi e visualizzare SICURO. Spostati da sinistra a sinistra e il display dovrebbe cambiare da SICURO ad ARMATO,
Fase cinque: eliche
Fissare le viti agli alberi del motore.


È tutto pronto. E infine, alcuni consigli dal maestro.
Inizialmente, il quadricottero può sembrare difficile da controllare. Il modo migliore per iniziare un volo è salire a circa 1 metro da terra e volare avanti e indietro, a sinistra ea destra, quindi avviare un quadricottero in un cerchio. Al quadricoptero non piace un volo "imbardata", quindi impara a operare senza problemi.
Iniziando a volare, tieni la parte posteriore del drone rivolta verso di te in modo da sapere sempre.
Le viti in fibra di carbonio sono più forti delle viti in plastica e non si rompono così.


