


Per prima cosa, capiamo la differenza tra l'octocopter e il quadricottero. Oltre al nome, questo è anche il numero di motori sui binari. ie quadrocopter - quattro motori, octocopter - otto. Questo vale anche per l'esacottero - sei, tricotteri - tre, ecc. Se le guide, ad esempio, sono quattro (X) e otto motori, questo è ancora un octocopter, ma è designato come X8. ie su quattro binari, otto motori.
Fondamentalmente, i numeri con un prefisso per gli elicotteri sono velivoli che sono controllati dal segnale radio dell'operatore da terra. Uno studente indiano ha deciso di spingersi oltre e creare un octocopter in grado di sollevare una persona in aria. Questo non è un progetto economico. Il finanziamento è stato rilevato dall'istituzione scolastica.
Strumenti e materiali:
- Motori Turnigy CA170 Motori - 8 pezzi;
- Controller Turnigy Fatboy 300A - 4 pezzi;
- Controller Turnigy 200A HV - 4 pezzi;
- Trasmettitore Hitech XG11 Tx / Rx;
-Volo controller DJI A3 Pro;
-Controllore di volo DJI Naza M V2;
- Batteria Zippy 22.2V 5Ah 40C LiPo - 16 pezzi;
- Caricabatterie LiPo Caricabatterie 6s;
-XT150 connettori - 50 pezzi;
-Filo 8AWG Sillicone Wire - 10 metri;
-Servoprivody;
-Palletta per giocare a squash (Squash Balls) - 4 pezzi;
- Foglio MDF 25 cm x 50 cm x 2 mm;
-Drel;
- Smerigliatrice angolare;
- cacciaviti;
- Chiavi;
- Pinze;
-Laser cutter o sega a nastro;
-Assortimento di dadi 4mm, 6mm e 8mm, bulloni e rondelle;
-Gorelka;
-LED LED;
-Accessori per saldatura;
- filo d'acciaio da 2 e 3 mm;
-Vite di fissaggio 100mm-200mm - 40 pezzi;
- 40 ganci e golfari;
-Tachimetro Turnigy RPM;
-Analizzatore di potenza (Turnigy Wattmeter / Ampmeter);
-Battery controller;
- Tubi profilati in alluminio;
-Piastra in alluminio;
- Nastro biadesivo;
-Saldatrice;
-Ruletka;
-Computer con Fusion 360;
- Batteria 11,1 V 2200 mAh LiPo 30C;
-Tessuto denso 1,2 m x 1,2 m;
- Filo e ago forti;
- Sicurezza del seno;
Primo passo: progettare
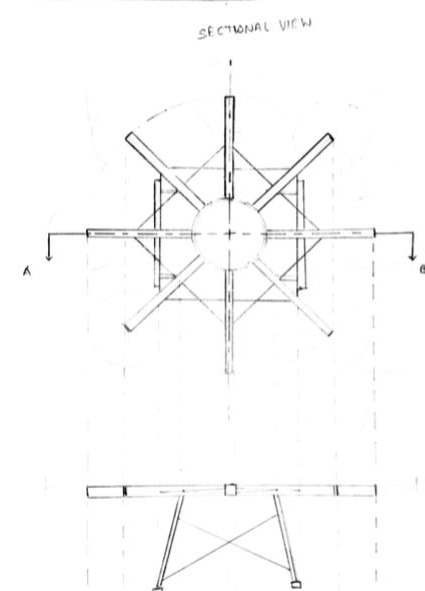
Durante lo sviluppo di un octocopter con equipaggio, il maestro prese in considerazione varie opzioni di configurazione, e X8, H e T, ma giunse alla conclusione che il più ottimale, per vari motivi, sarebbe stato il design dell'octocopter, secondo lo schema tradizionale.
Quindi è stato necessario scoprire quale dovrebbe essere la dimensione dell'octocopter. I calcoli sono stati effettuati utilizzando come esempio i modelli CAD su Fusion 360. Nei calcoli sono state prese in considerazione le viti esistenti. L'ottimale si è rivelato essere un diametro di tre metri, un'altezza di un metro. Cestino interno, per una persona 55x55 cm.

Fase due: carrello
Il telaio è stato saldato da un profilo quadrato in alluminio con una mensola di 50 mm e uno spessore della parete di 2 mm.
Il profilo è stato tagliato e saldato. Le cuciture vengono pulite.



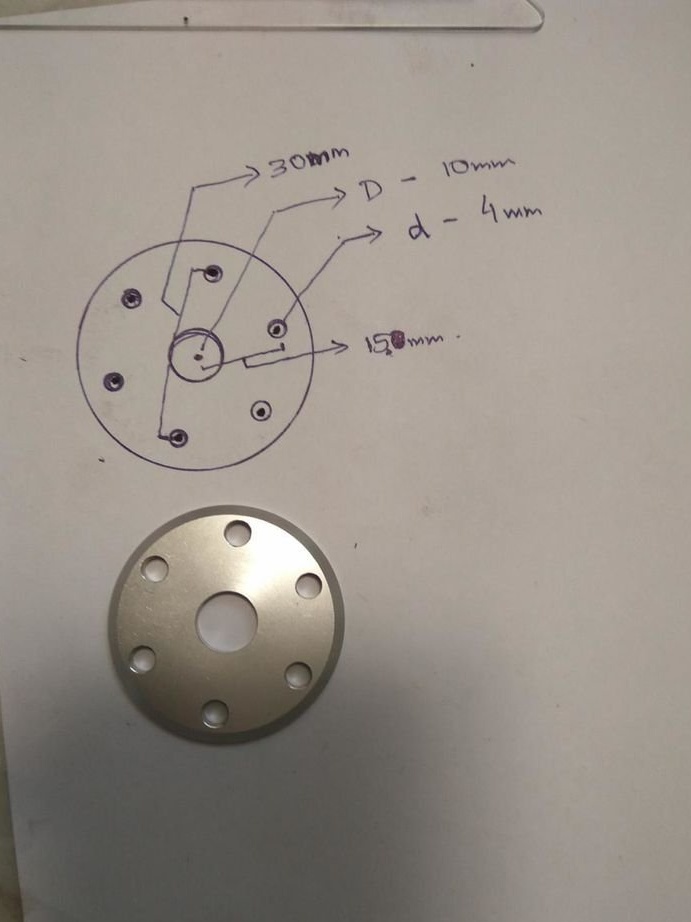
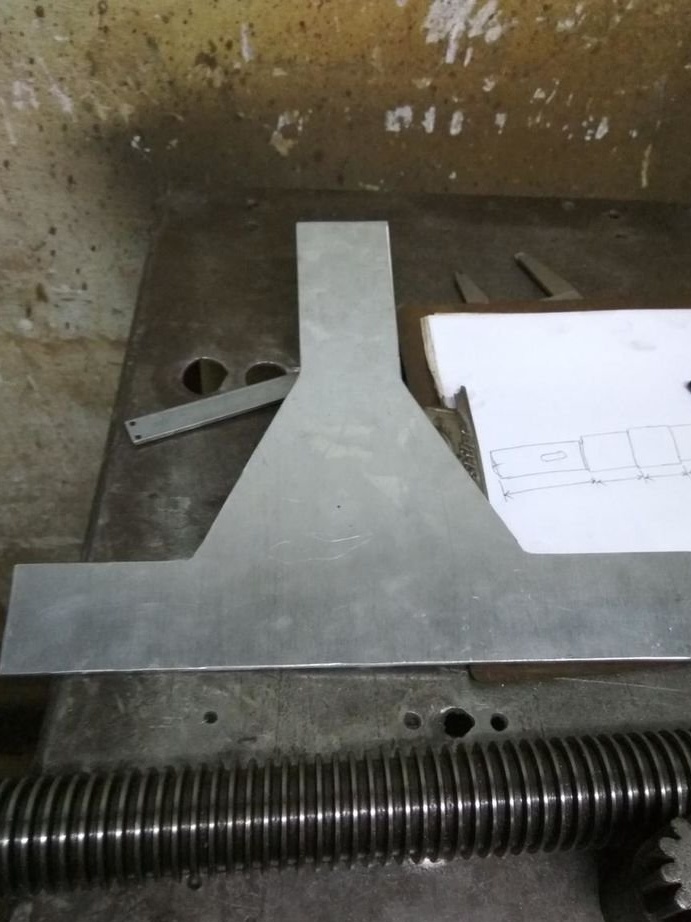
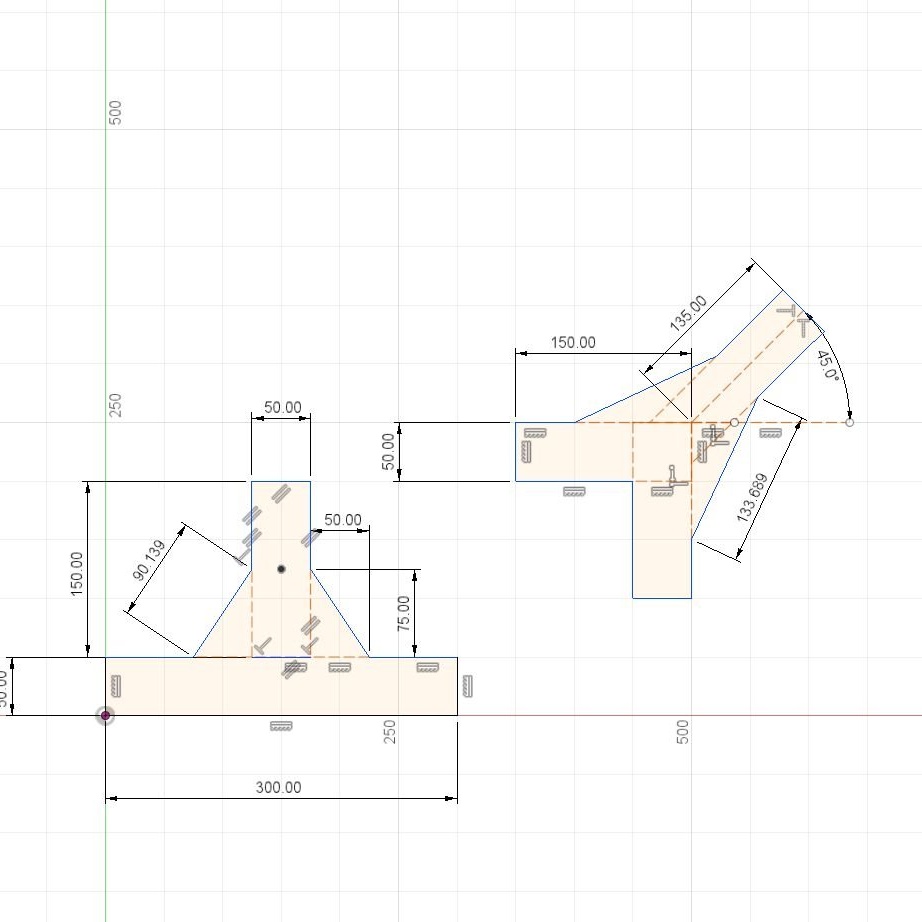
Fase tre: piastre di montaggio
Per le staffe, il maestro utilizzava piastre di alluminio da 1,5 mm. Ci sono otto parentesi in totale, quattro negli angoli e quattro al centro del riquadro. La lunghezza della spalla del braccio e la parte di supporto è di 15 cm ciascuna Le staffe sono state progettate in Fusion 360. Le piastre sono state tagliate con una fresa. In essi sono praticati fori di montaggio. Quindi le staffe sono state saldate al telaio.






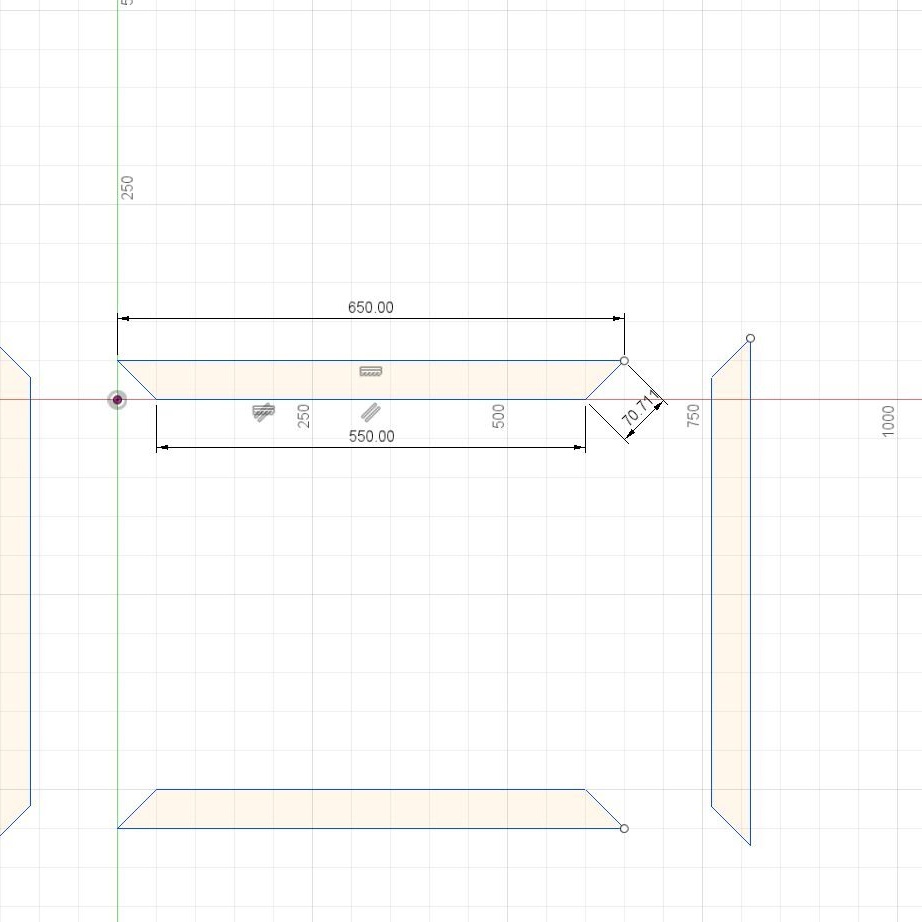
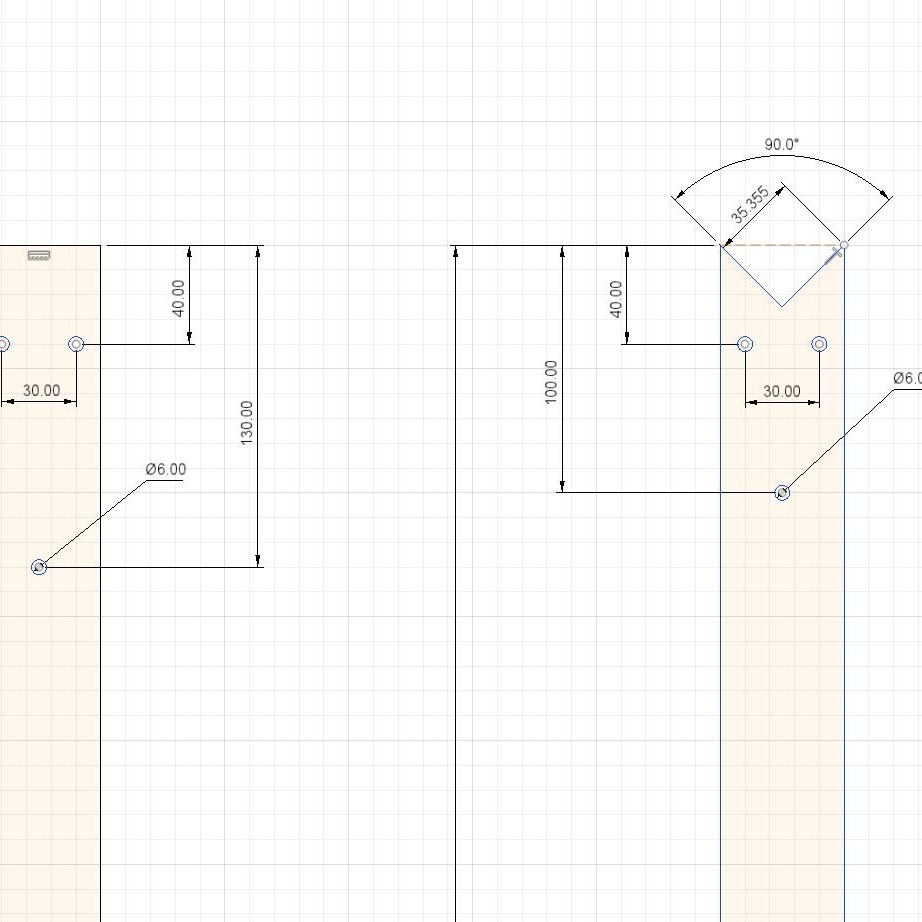
Fase quattro: profilo del vettore
Questi profili sono fissati alle staffe e i motori sono installati alle estremità. I profili sono quadrati, 50 X 50 cm e hanno lunghezze diverse. Profili di 112,5 cm di lunghezza sono fissati negli angoli, 125 cm di profilo sui lati e un ritaglio è realizzato su profili angolari con un angolo di 45 gradi. È necessario che la sua faccia terminale sia adiacente al piano dell'angolo.
Per fissare i profili alle staffe, il master esegue i fori per i bulloni.




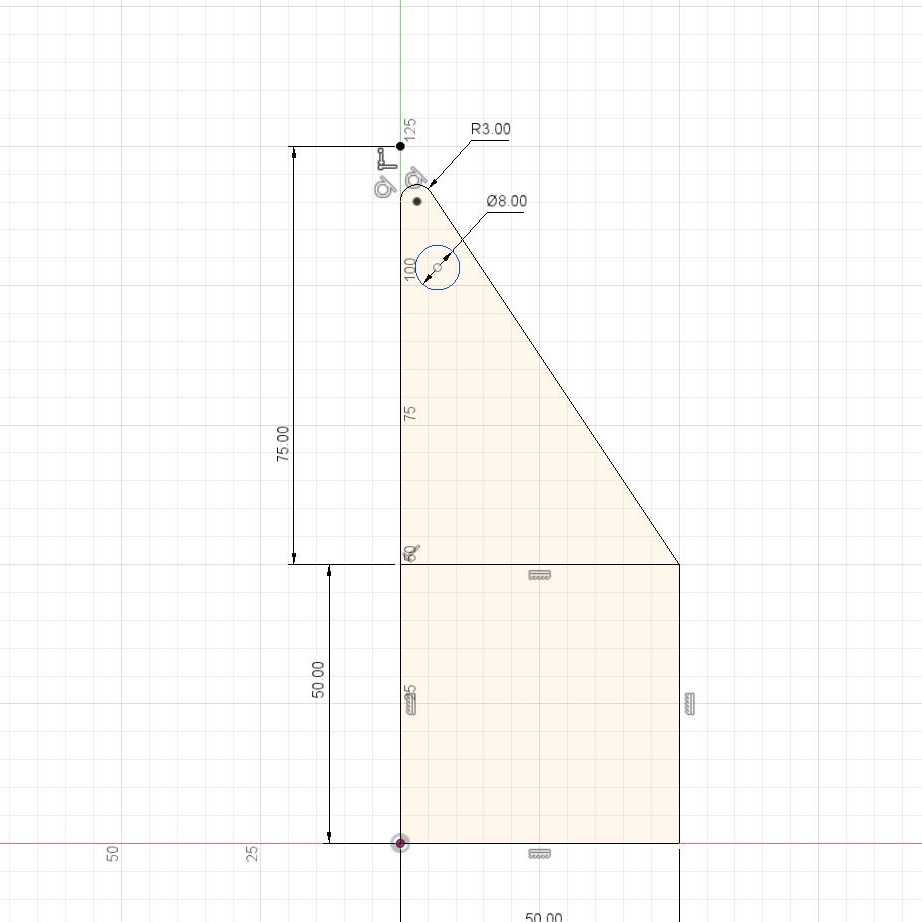
Fase cinque: supporto motore
I motori sono avvitati su una piastra quadrata in alluminio. Dal fondo della piastra, paralleli tra loro, vengono avvitati due angoli. La distanza tra loro è uguale alla larghezza del profilo. Inoltre, la piastra con il motore è montata sul profilo, i fori di montaggio sono praticati e tutto è attorcigliato con bulloni.





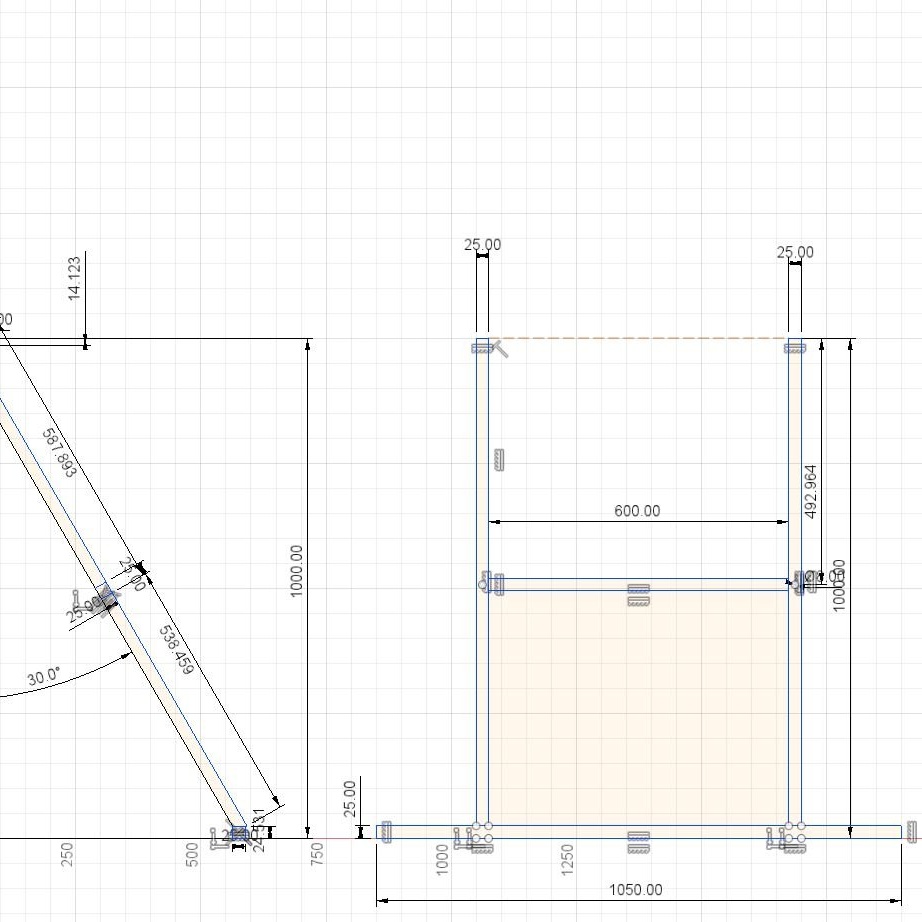
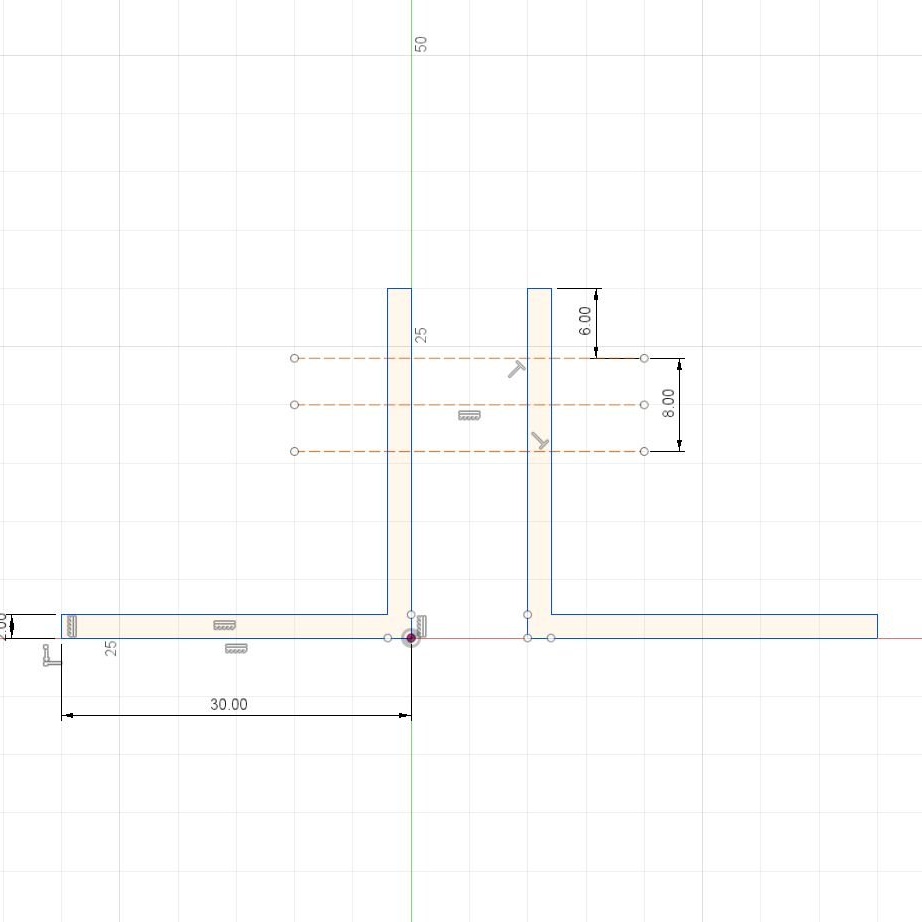
Passaggio 6: telaio
Il telaio era realizzato con profili in alluminio 25 x 25 mm e uno spessore di 3 mm. Tutte le parti sono state saldate e le loro dimensioni sono visibili nella foto. L'idea era di montare il telaio fuori dal cestello con un angolo di 30 gradi. Per evitare danni allo chassis, i cavi di supporto vengono tirati tra di loro.


Passaggio 7: supporto dei profili di supporto
Dopo aver installato i motori, i profili di supporto hanno iniziato a piegarsi. Quindi il maestro ha provato ad avviare il motore e ha scoperto che i profili "camminano". È stato necessario rafforzare il design.
L'aggiunta di piastre aggiungerebbe troppo peso alla struttura. Quindi il maestro ha deciso di realizzare un disegno a forma di V dal cestino in giù. Le corde sono attaccate alla sua parte inferiore. Le altre estremità dei cavi sono fissate alle staffe al centro dei profili di supporto. I cavi vengono tirati con un paranco. Pertanto, la struttura diventa rigida.















Passo otto: connettiti
Innanzitutto, il master salda i connettori alle estremità dei fili.


Quindi inizia l'installazione. Ogni motore doveva essere controllato per la direzione di rotazione. Se necessario, è facile cambiare il senso di rotazione del motore e, di conseguenza, la vite, scambiando due dei tre fili provenienti dall'ESC al motore. Dopo che tutti i motori sono stati collegati correttamente, la procedura guidata ha eseguito l'installazione secondo lo schema di collegamento del produttore.
I controller di volo IMU DJI A3 sono molto sensibili alle interferenze dei metalli e il master non è stato in grado di configurare il sistema a causa di interferenze. Di conseguenza, il master ha sostituito A3 con Naza M V2, che aveva uno schema di connessione simile. Naza M V2 ha funzionato in modo molto affidabile.
Quindi la procedura guidata collega le batterie. Su ciascun profilo di supporto, due batterie da 22,2 V sono collegate in serie.



Step Nine: sedile pilota
Il sedile è stato cucito con tessuto resistente. Inoltre, una cintura di sicurezza è attaccata al pilota, che è attaccato al telaio, e un casco.






Passo dieci: primo volo
Prima del volo del pilota sull'octocopter, sono stati condotti diversi test con un sacco di sabbia e poi con un modello di una persona. Durante il volo, sono state simulate varie situazioni dalla perdita di controllo a una folata di vento.
Dopo tutti i test, il pilota ha finalmente volato in aria.






Prima di volare, è necessario eseguire le seguenti azioni.
Controllare la tenuta di bulloni, cavi, montaggio del motore.
Controllare il cablaggio.
Verificare che le viti ruotino facilmente.
Assicurarsi che tutti gli ESC siano disattivati.
Assicurarsi che tutte le batterie siano saldamente collegate e caricate.
Collegare l'alimentazione al controller di volo per l'inizializzazione e la calibrazione.
Dopo il collegamento al GPS, passerà alla modalità completamente automatica (Alt. + Att. Attesa).
Siediti al posto del pilota e allaccia la cintura.
Collegare tutte le batterie all'ESC.
Collegare le due batterie in serie (ESC-RB-RB-ESC) usando una resistenza per eliminare la scintilla.
Accendere i motori portando l'interruttore in posizione ON.
Utilizzare il controller per controllare l'octocopter.