

Vuoi litigare tra robot ragno? Quindi studia attentamente questo articolo, in esso il Maestro ti dirà come realizzare un tale ragno. E per chiarezza del suo lavoro, vediamo il video.
Strumenti e materiali:
Per il ragno
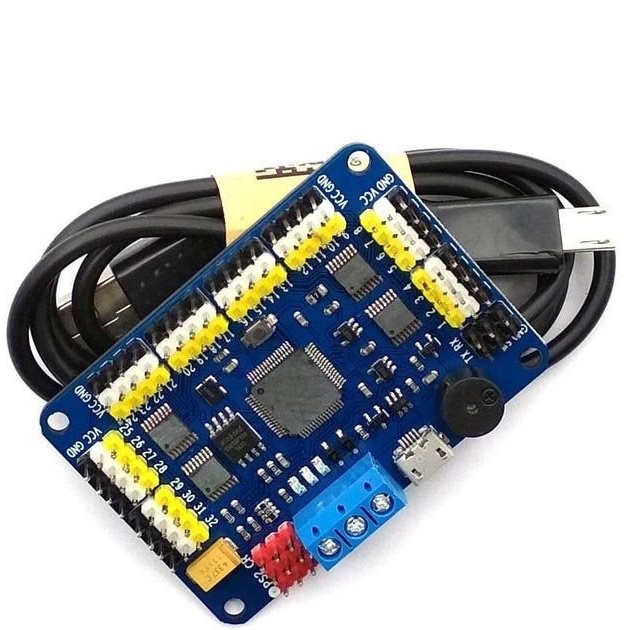
Servo controller a 32 canali;
-Wemos D1 Mini controller;
- Servoazionamenti MG90S - 18 pezzi;
-Ubec 6A 5V controller;
- Convertitore buck DC-DC;
- Maglioni;
-Akkumulyator;
Per la torre
-Due motori;
-Modulo di potenza;
- Abbassamento convertitore;
-Servoprivod;
-3D stampante;
- Pistola per colla;
-Kley;
- cacciavite;
-Krepezh;
- Nastro biadesivo;
-Kusachki;
-Nozh;
-Nadfili;
-Palle di plastica;
-Accessori per saldatura;






Fase 1: stampa di parti
Per prima cosa devi stampare i dettagli del corpo e delle gambe su una stampante 3D. È possibile scaricare file per la stampa su questo il link.


Secondo passo: costruire
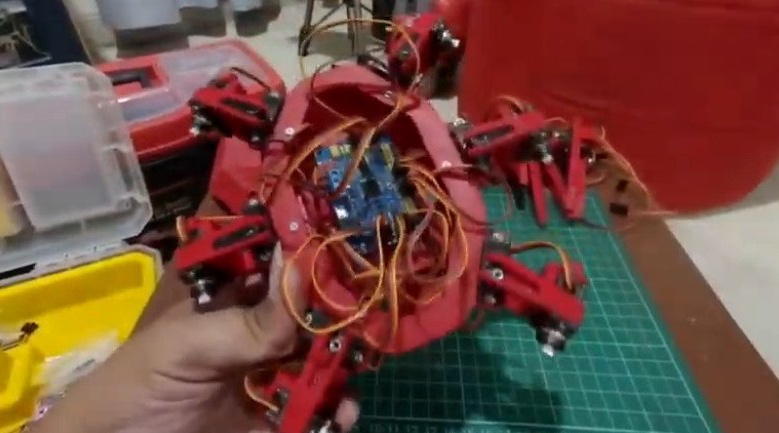
Ora devi raccogliere robopauk.
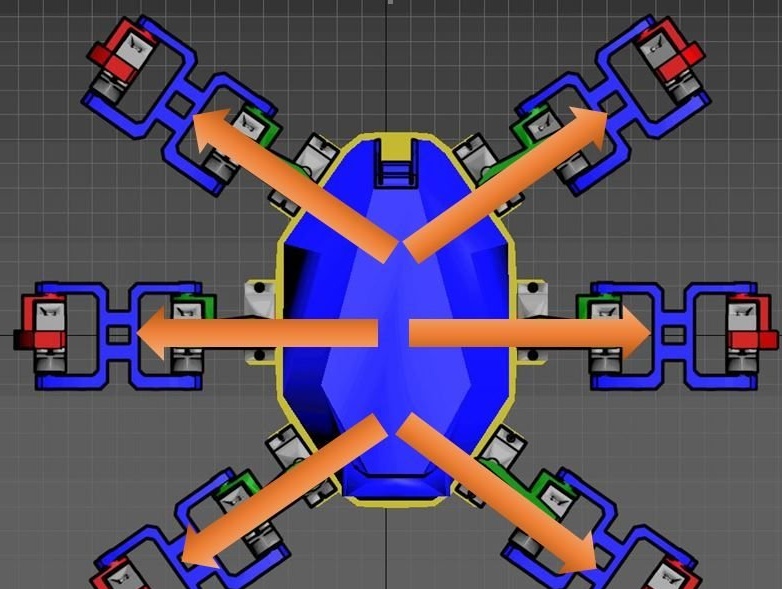
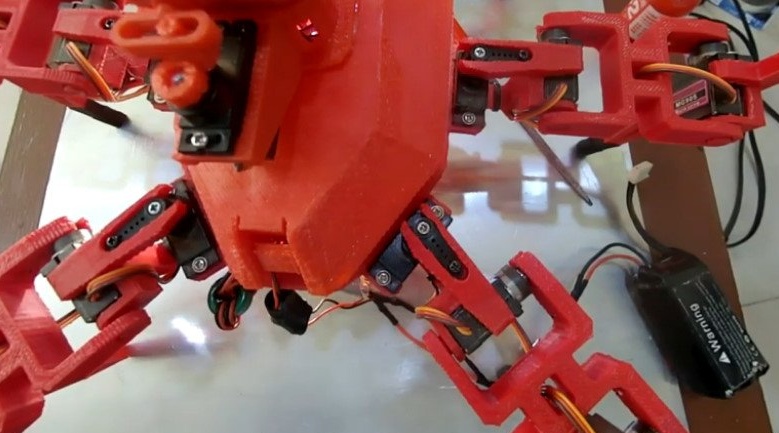
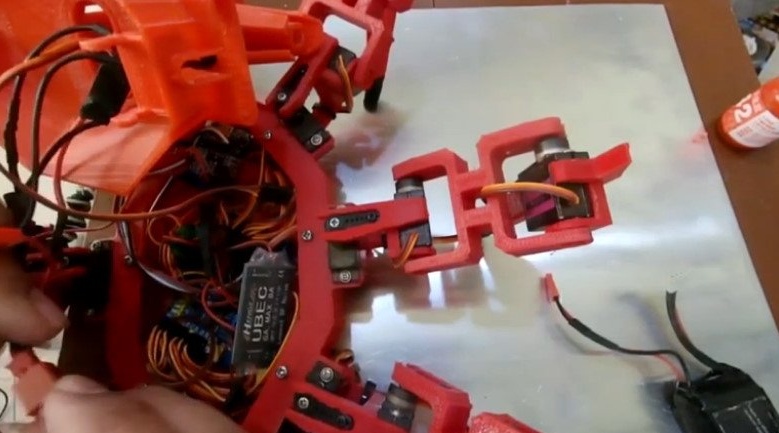
Il maestro installa servi sulle articolazioni delle gambe del ragno. In totale, il robot ha sei gambe e tre servi su ciascuna gamba.








Installa i servi sulla piattaforma del telaio.




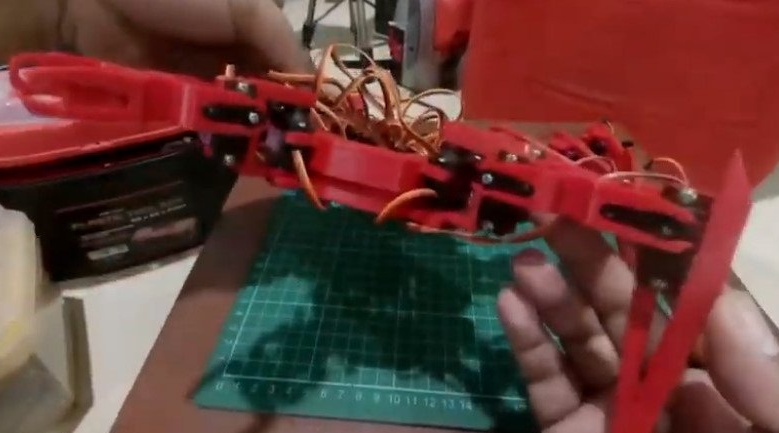
Fissa i primi giunti delle gambe ai servi della piattaforma.




I fili vengono tirati nei fori tecnologici e collegati al controller.





Installa gli stub.


Stabilisce le seconde articolazioni delle gambe. Collega i fili dai servi al controller.






Installa il terzo giunto. Con questa articolazione, il ragno si appoggerà alla superficie durante lo spostamento.



Collega e controlla il funzionamento di ciascun servoazionamento.



Se tutto normalmente fissa i fili con le fascette, installa la batteria e chiude il coperchio.



Il processo di compilazione può essere visto nel video.
Fase tre: informazioni elettronica
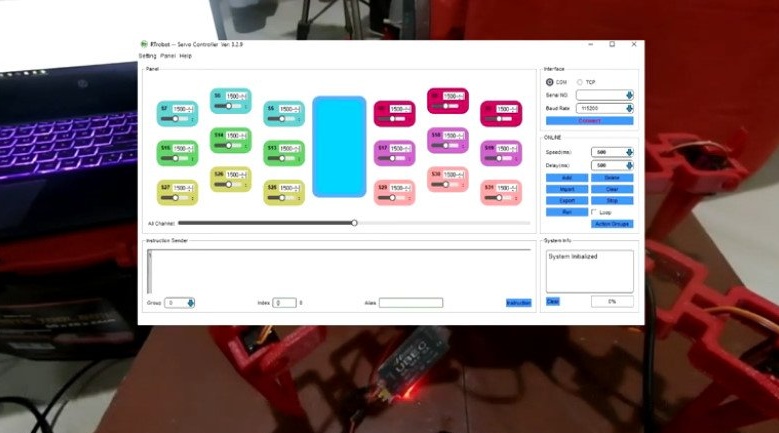
La procedura guidata utilizzava il servocomando RTrobot per controllare i movimenti. Il programma di gestione può essere scaricato qui o qui.
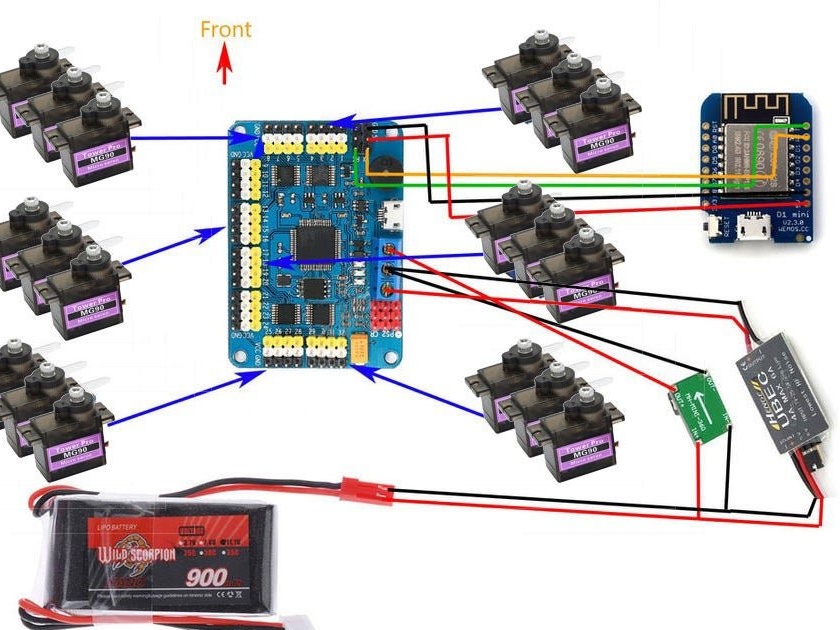
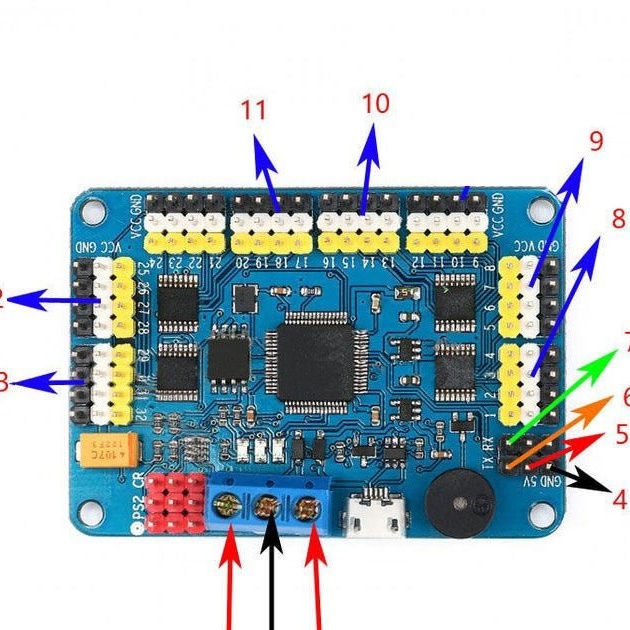
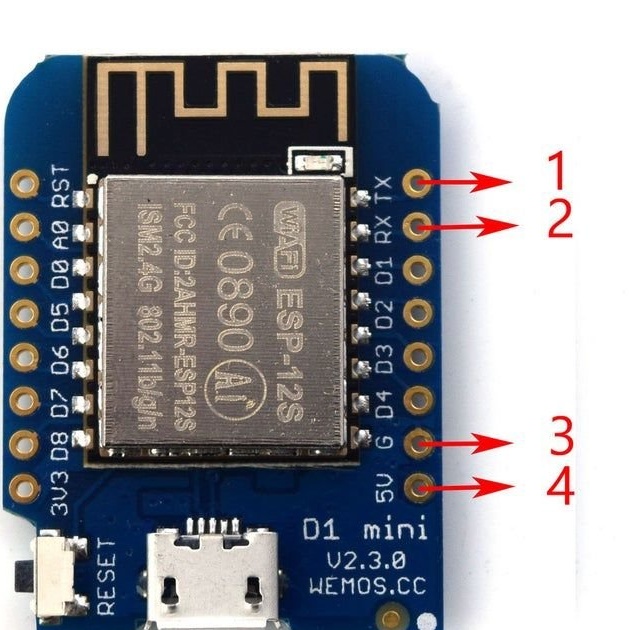
Tutto è collegato come segue:
1. Uscita UBEC 5V (+)
2. Terra da UBEC e convertitore buck
3. Alimentazione 5 V (+) dal convertitore
4. sul pin mini G Wemos D1
5. a Wemos 5v
6. a Wemos D1 RX
7. Wemos TX
I servoazionamenti sono collegati ai pin da 8 a 13.
Installa il codice su NodeMCU. Puoi scaricarlo qui.
WeMos D1 mini è la scheda Wi-Fi minima ESP8266.
Utilizzando wemos D1 mini come punto di accesso WIFI, è possibile inviare un comando seriale al servo controller. Tutto ciò che serve è solo il flashing della scheda nodeMCU con il codice e puoi connettere lo smartphone all'AP nodeMCU. Quindi, utilizzando un browser Web, andare su http://192.168.4.1.
È importante.
quando si accende il servo, tutti i servi si sposteranno nella posizione originale / standard
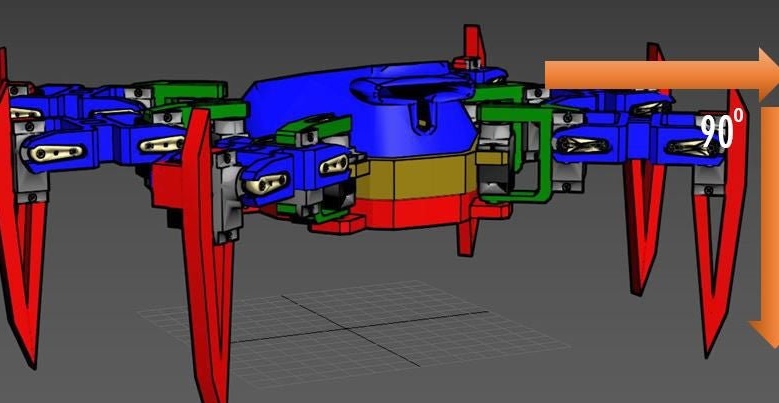
installa i servi nel modo più preciso possibile, come mostrato nella figura sopra o nel video
regolare la posizione delle articolazioni, spegnere e riaccendere il dispositivo per assicurarsi che tutte le gambe siano nella posizione corretta
se le articolazioni aderiscono, strofinare, regolare la posizione.
Quarto passo: la torre
Ora passiamo all'assemblea della torre.
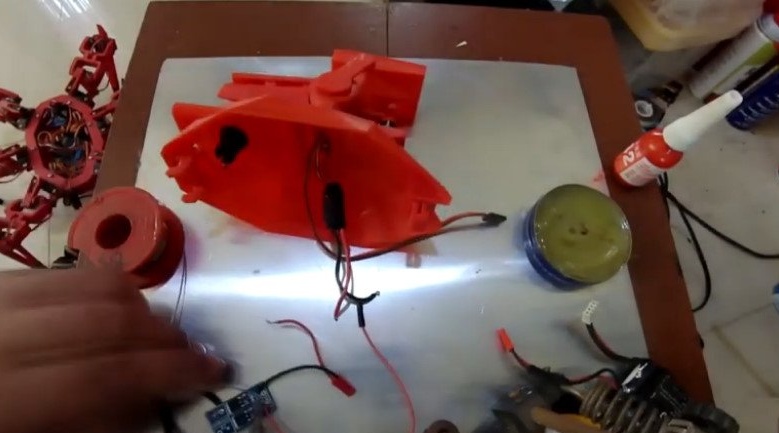
Innanzitutto, i dettagli della torre devono essere stampati. Puoi scaricare file su questo il link.
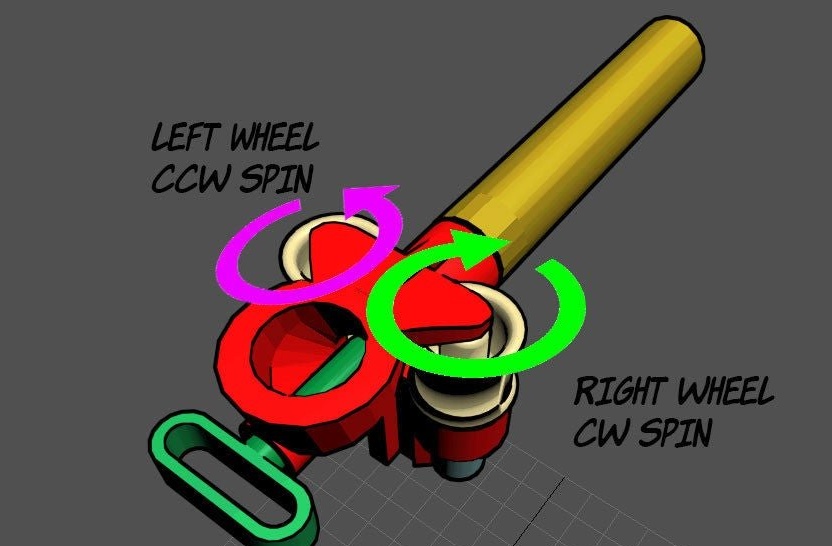
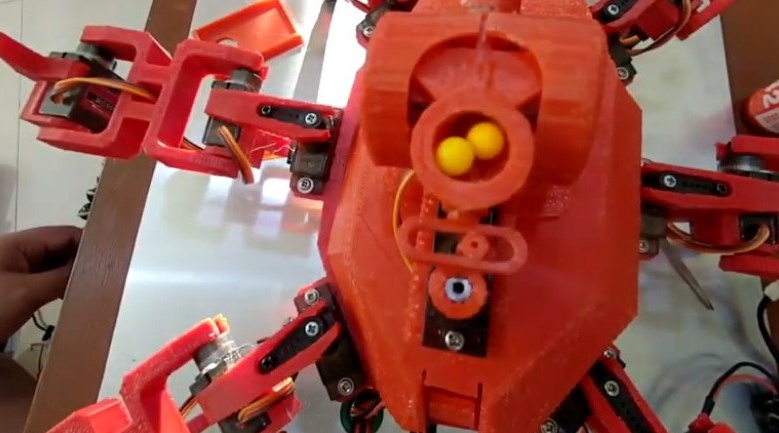
Quindi il maestro procede al montaggio della torre. Il circuito per girare la torre e collegare le parti elettriche è sotto.
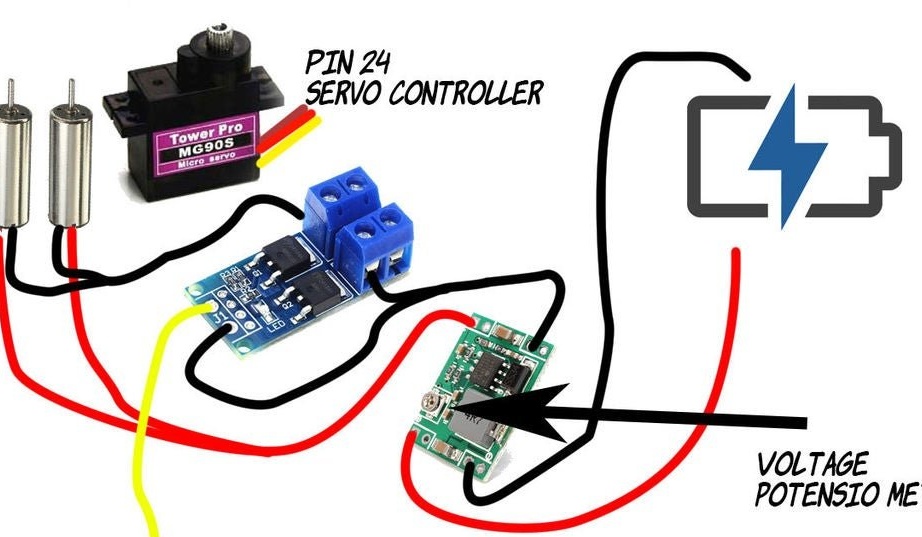
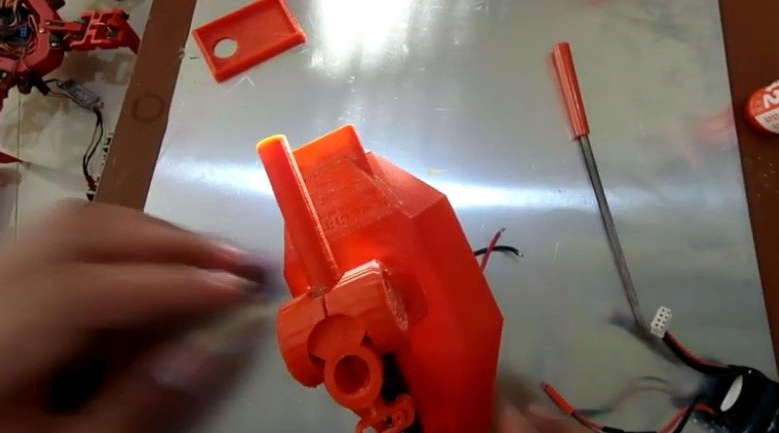
Installa un servo sulla torre.







Il nastro biadesivo si attacca ai rulli.


Colleziona una pistola. Installa i motori in un supporto. Installa rulli sugli alberi motore.







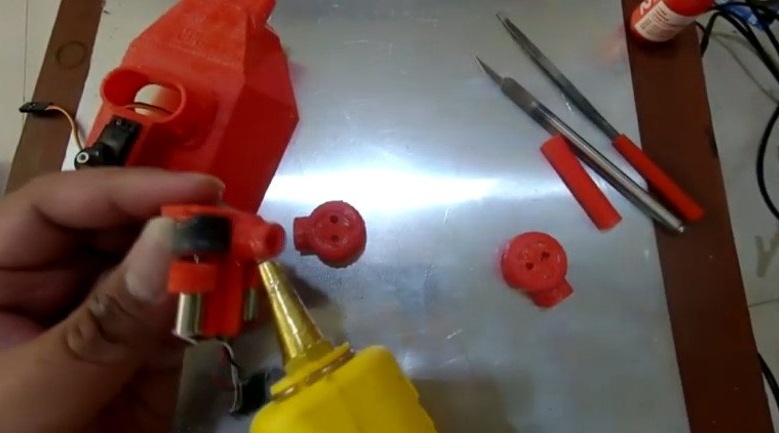

Collega i fili e raccoglie la torre.




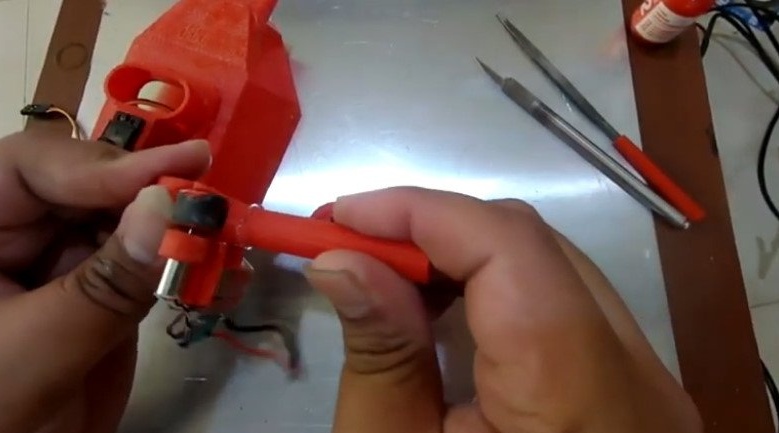
Carica proiettili e controlla il funzionamento della pistola. Il meccanismo può essere regolato spostando il supporto sull'albero servo.


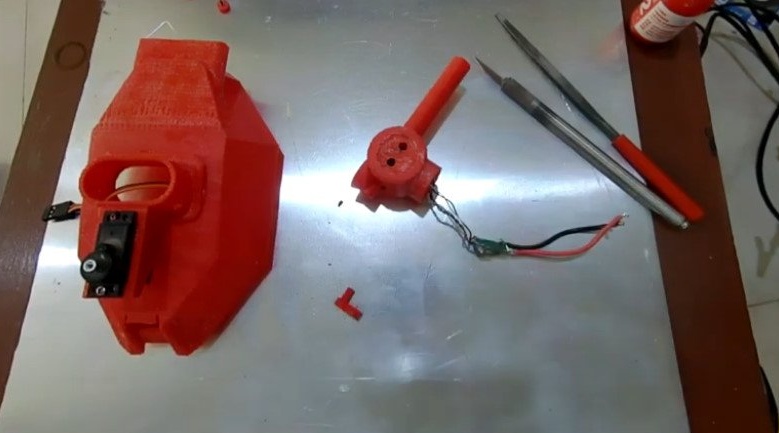
Effettua il collegamento finale, l'assemblaggio e l'ispezione.




Di seguito è possibile vedere il video con l'assemblaggio della torre.
È tutto pronto. Raccogli ancora uno di questi robopauk e puoi organizzare combattimenti.
