

Questo progetto è ideale per coloro che spesso dimenticano di nutrire i loro pesci. O semplicemente non sempre in grado di farlo in tempo. Avendo creato un tale alimentatore, non puoi preoccuparti dei tuoi piccoli animali domestici e persino sentirti libero di andartene per un po '.
materiali:
- Arduino UNO o un altro microcomputer compatibile.
- Adattatore di alimentazione 9V o 12V.
- Un motore passo-passo 5V da un vecchio floppy drive.
- Partizione liscia (utilizzata dalla cassetta degli attrezzi).
- Interruttore a leva da un telefono fisso.
- Il caso dal disco rigido (funge da contenitore per l'alimentazione).
- Piastra liscia (ad es. Righello di plastica).
- Treppiede da una telecamera TVCC.
- Resistenza 10 kOhm.
- Timer meccanico CA.
Primo passo. Assemblaggio del caso:
Il disegno dell'assieme è mostrato nella prima figura. Viene praticato un foro su un lato del contenitore del disco rigido. Per questa parte dell'alimentatore, puoi persino usare una bottiglia di plastica, tuttavia dovrai trovare un supporto per tenerlo sottosopra.
L'autore utilizza un treppiede da una telecamera TVCC, poiché ha un'altezza ideale per l'installazione di un motore passo-passo sotto di esso. Non restava che praticare un foro nell'involucro.
Per spostare il coperchio è stato utilizzato un motore passo-passo 5V con un meccanismo di azionamento utilizzato per spostare gli obiettivi di azionamento. Una partizione liscia dalla scatola è stata posizionata sopra il supporto dell'obiettivo, sotto il foro in cui i pellet di alimentazione dovrebbero uscire. Per fare ciò, si consiglia anche di usare un righello rotto. Lasciare un millimetro dal fondo dello scafo in modo che i pellet di alimentazione possano passare attraverso il coperchio chiuso.


Secondo passo Modifica del corpo:
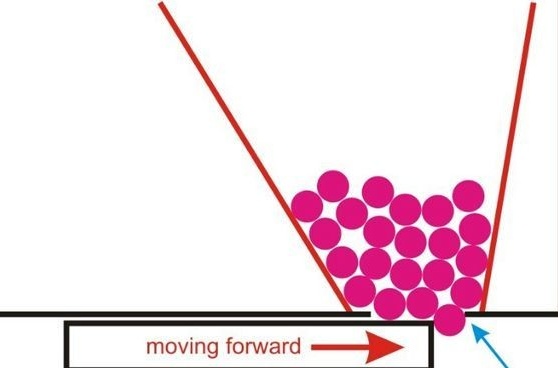
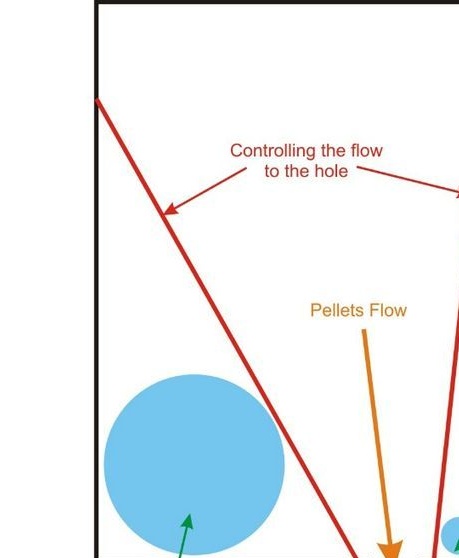
Il diagramma seguente mostra come l'alimentazione deve passare correttamente attraverso il foro in modo che i pellet non indugino negli angoli di uscita dell'alimentazione.
Dopo due giorni di utilizzo, l'autore si è reso conto che parte del feed era bloccato, ma non è uscito come previsto. Questo è il motivo per cui avevamo bisogno di un righello o di una piastra liscia che si adattasse al contenitore e nella forma della lettera V.

Terzo passo elettronico parte dell'alimentatore:
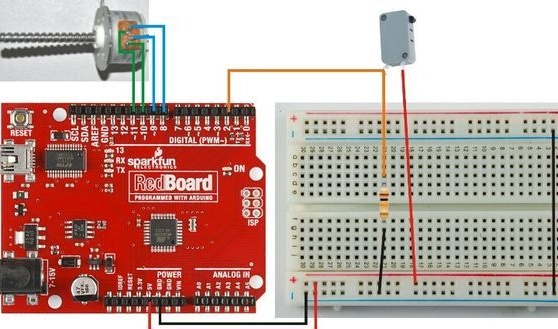
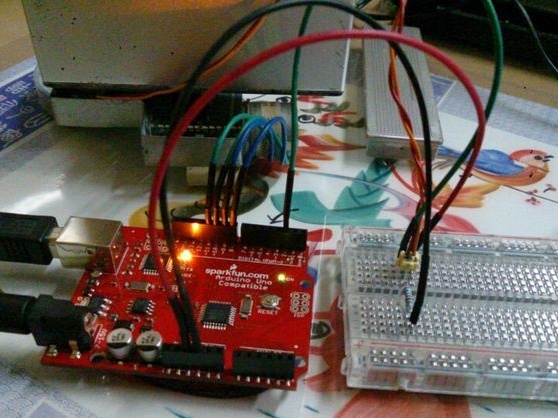
Un motore passo-passo, una resistenza da 10 kΩ e un interruttore sono installati come mostrato nello schema seguente. Per facilitare la comprensione del funzionamento del circuito e dei test, viene utilizzata una breadboard, mancante nell'assemblaggio finale (esempio nell'ultima foto).
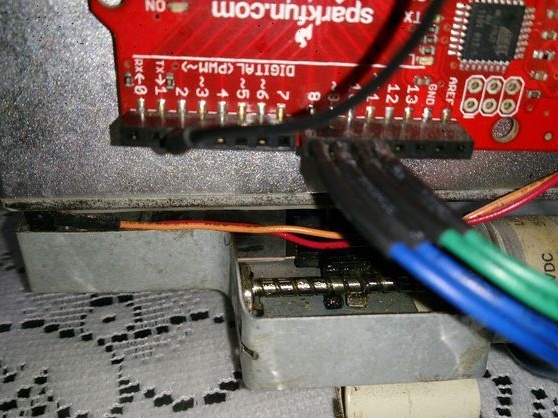
Quattro cavi motore si collegano ai pin digitali 8-11. Un piede dell'interruttore sull'uscita di potenza 5V. La seconda gamba, a sua volta, è collegata a terra mediante un resistore da 10 kΩ ed è anche collegata al pin digitale 2.
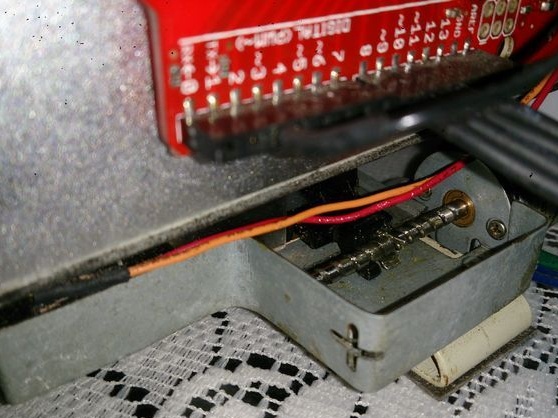
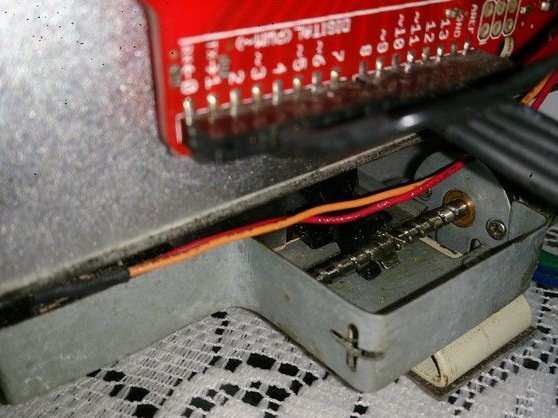
L'interruttore è posizionato di fronte al coperchio mobile e la parte metallica è piegata, formando così un tappo (filo rosso e arancione nella terza foto). Quando l'interruttore viene spostato in avanti e preme l'arresto, Arduino registra un valore ALTO e arresta il motore.
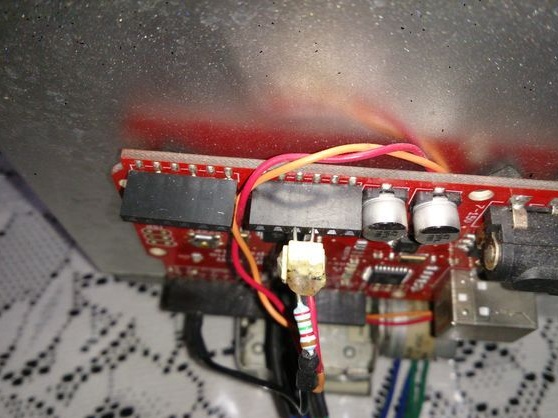
La scheda è fissata sul retro della custodia con del nastro isolante e la spina con un timer sul lato. Sono utilizzati per bilanciare la custodia in modo che rimanga nella posizione corretta.
Prova di lavoro fatto in casa senza contenitore per alimenti:
Il video seguente mostra il funzionamento di un dispositivo completamente assemblato. Come puoi vedere, la prima uscita del feed è corretta. Alla seconda uscita dell'alimentazione, si può vedere che se i granuli sono bloccati e il coperchio non si chiude correttamente, si sposterà avanti e indietro fino a quando non si chiude correttamente.
Codice programma: