
Questo articolo parlerà di come fallo da solo Puoi realizzare un dispositivo così interessante come Levitron. In effetti, un levitron è una trottola o un altro oggetto che si libra nello spazio a causa dell'azione di un campo magnetico. I levitroni sono diversi. Il modello classico utilizza un sistema di magneti permanenti e una trottola. Aleggia sopra i magneti durante la rotazione a causa della formazione di un cuscino magnetico sottostante.
L'autore ha deciso di migliorare un po 'il sistema costruendo un levitron basato su Arduino usando elettromagneti. Utilizzando questi metodi, la parte superiore non deve ruotare per librarsi in aria.
Tale dispositivo può essere utilizzato per vari altri fai da te. Ad esempio, può essere un cuscinetto eccellente, poiché praticamente non vi sono forze di attrito. Inoltre, su un prodotto così fatto in casa, puoi condurre vari esperimenti, beh, o giocare con gli amici.
Materiali e strumenti per la produzione:
- microcontrollore Arduino UNO;
- sensore Hall lineare (il modello UGN3503UA);
- vecchi trasformatori (per bobine di avvolgimento);
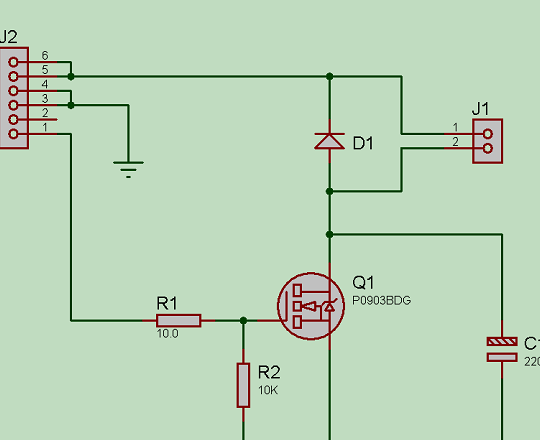
- transistor ad effetto di campo, resistori, condensatori e altri elementi (le classificazioni e le marche sono mostrate nel diagramma);
- fili;
- saldatore con saldatura;
- Alimentazione 12V;
- sughero;
- un piccolo magnete al neodimio;
- colla a caldo;
- La base per avvolgere bobine e materiali per creare un corpo fatto in casa.
Il processo di fabbricazione del levitron:
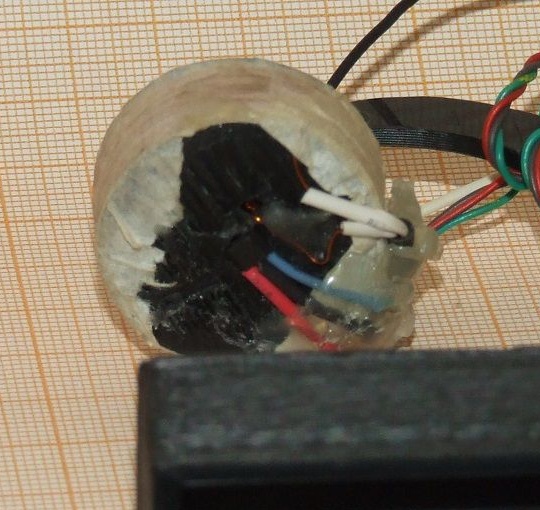
Primo passo. Crea una bobina
La bobina sarà un elettromagnete, creerà un campo magnetico che attirerà la parte superiore. Come cima ci sarà un tappo su cui è attaccato un magnete al neodimio. Invece del sughero, puoi usare altri materiali, ma non troppo pesanti.
Per quanto riguarda il numero di giri nella bobina, qui l'autore non ha menzionato una figura del genere, la bobina stava andando all'occhio. Di conseguenza, la sua resistenza era di circa 12 ohm, altezza 10 mm, diametro 30 mm e lo spessore del filo utilizzato dovrebbe essere 0,3 mm. Non vi è alcun nucleo nella bobina, se è necessario creare una parte superiore più pesante, la bobina può essere dotata di un nucleo.
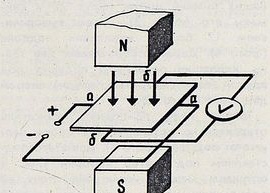
Secondo passo Il ruolo del sensore Hall
Affinché la cima possa librarsi in aria, piuttosto che attaccarsi saldamente al solenoide, il sistema ha bisogno di un sensore in grado di misurare la distanza dalla cima. Come tale elemento, viene utilizzato un sensore Hall. Questo sensore è in grado di rilevare il campo magnetico non solo di un magnete permanente, ma può anche determinare la distanza da qualsiasi oggetto metallico, poiché tali sensori stessi creano un campo magnetico elettrico.
Grazie a questo sensore, la parte superiore si mantiene sempre alla giusta distanza dal solenoide.

Quando la parte superiore inizia ad allontanarsi dalla bobina, il sistema aumenta la tensione. Al contrario, quando la parte superiore si avvicina a un solenoide, il sistema riduce la tensione nella bobina e il campo magnetico si indebolisce.
Ci sono tre uscite sul sensore, questa è una potenza di 5 V, oltre a un'uscita analogica. Quest'ultimo è collegato all'ADC Arduino.
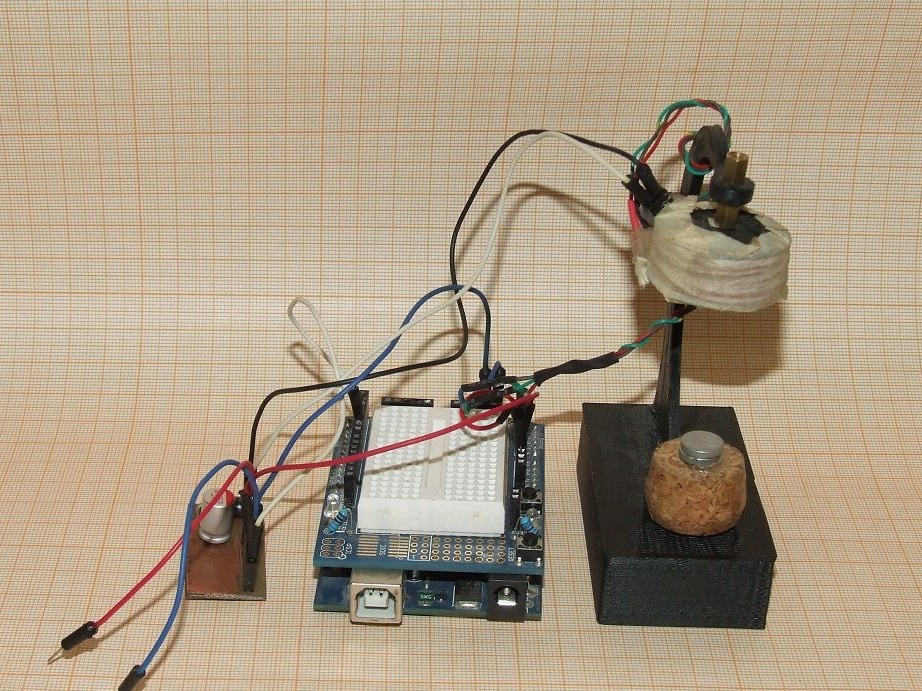
Terzo passo Montiamo il circuito e installiamo tutti gli elementi
Come corpo per il lavoro fatto in casa, puoi usare un pezzo di legno, a cui devi creare una semplice staffa per fissare la bobina. elettronico lo schema è abbastanza semplice, tutto può essere compreso dalla foto. L'elettronica funziona da una fonte a 12 V e, poiché il sensore necessita di 5 V, è collegato tramite uno stabilizzatore speciale, che è già integrato nel controller Arduino. Il dispositivo massimo consuma circa un ampere. Quando la cima sale, il consumo attuale è compreso tra 0,3-0,4 A.
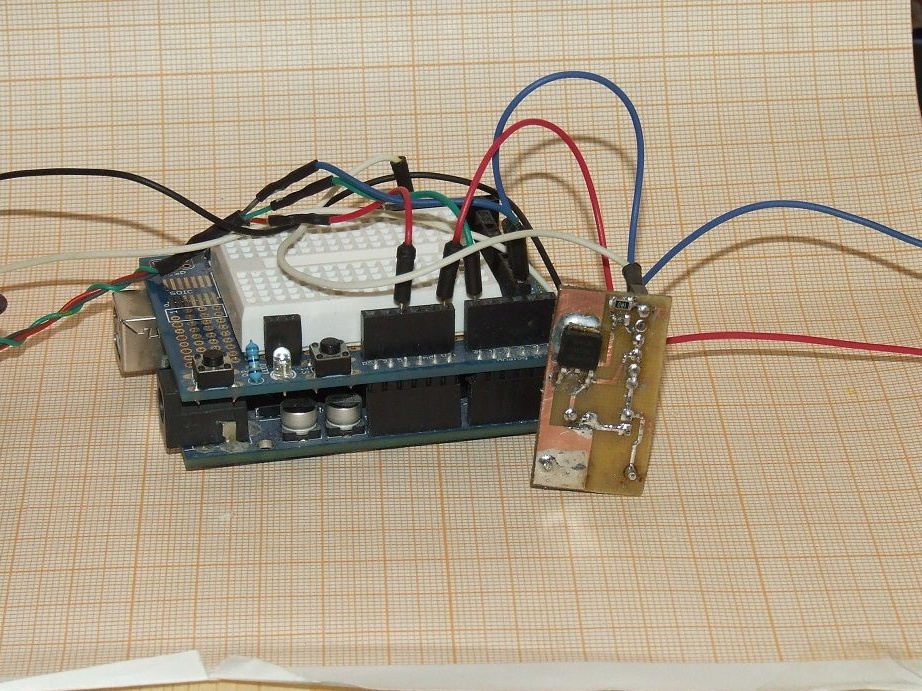
Un transistor ad effetto di campo viene utilizzato per controllare il solenoide. Il solenoide stesso è collegato alle uscite di J1 e il primo contatto del connettore J2 deve essere collegato al PWM Arduino. Il diagramma non mostra come collegare il sensore Hall all'ADC, ma non dovrebbero esserci problemi.
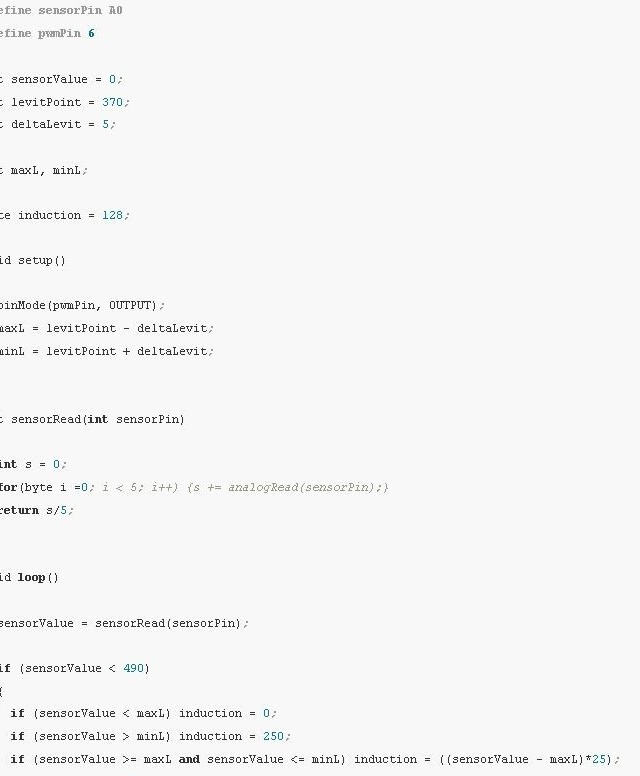
Fase quattro Firmware del controller
Per programmare il controller per le azioni necessarie, è necessario il firmware. Il programma funziona in modo molto semplice. Quando i valori iniziano a cadere al di fuori dell'intervallo consentito, il sistema aumenta la corrente al massimo o si spegne completamente. Nelle versioni successive del firmware, è stato possibile regolare senza problemi la tensione sulla bobina, quindi le brusche fluttuazioni della parte superiore si sono fermate.
Questo è tutto, il prodotto fatto in casa è pronto. Al primo avvio, il dispositivo ha funzionato, ma sono stati scoperti alcuni difetti. Quindi, ad esempio, quando si lavora per più di 1 minuto, la bobina e il transistor hanno iniziato a surriscaldarsi. A questo proposito, in futuro, è necessario installare un radiatore sul transistor o metterne uno più potente. La bobina dovrà anche essere rifatta, avendo escogitato un design più affidabile rispetto alle semplici bobine di filo con colla a caldo.
Per proteggere la fonte di alimentazione, è necessario fornire grandi condensatori ai circuiti di ingresso. Il primo alimentatore da 1,5 A dell'autore si è esaurito dopo 10 secondi a causa di forti sbalzi di corrente.
In futuro, è previsto il trasferimento dell'intero sistema a un alimentatore da 5 V.