

L'autore ha basato questo progetto su una versione più semplice. fatto in casa barche, e lo perfezionò. I sensori sono posizionati nella barca per evitare ostacoli e per spostarsi nella luce. Come viene utilizzato il controller nella barca Arduino, un sensore a ultrasuoni è installato nella parte anteriore e i sensori di luce si trovano sui lati. Questa semplice barca non si schianta contro le pareti ed è controllata da una torcia.
Materiali e strumenti:
- Nastro isolante / nastro adesivo
- Thermoglue con colla a caldo
- Motori DC 2 pezzi
- Bottiglie di plastica 2 pezzi
- fili
- Piccole eliche 2 pezzi
- Arduino, computer e cavo USB
- Scatola di plastica
- Batteria e connettore 9V
- Diodi di potenza (tipo 1N4004)
- Resistori
- MOSFET a transistor o TIP 120
- Due fotocellule e due pulsanti
- forbici
- Saldare con un saldatore

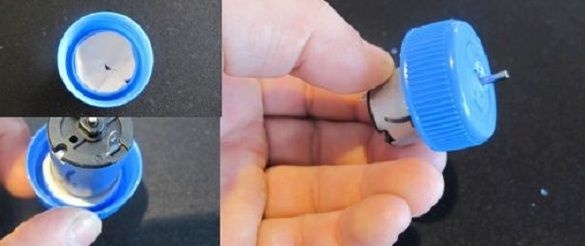
Passaggio 1. Installazione dei motori.
I coperchi vengono rimossi dalle bottiglie e viene praticato un foro in ciascuna di esse. All'interno della copertina, l'autore spreme la colla a caldo senza chiudere i fori. Mise l'albero del motore nel foro e lo mise sulla colla. Dopo che la colla si asciuga, l'albero ruota liberamente. La stessa procedura si verifica con la seconda copertina.
Passaggio 2. Collegamento delle bottiglie.
Le bottiglie sono state fissate insieme dal principio di una zattera con l'aiuto di tre strisce di nastro adesivo.

Passaggio 3. Saldatura ai motori.
Poiché i motori montati nelle spine non avevano fili, era necessario saldarli, la lunghezza dei fili era di circa 25-30 cm.

Passaggio 4. Il taglio nelle bottiglie.
Affinché i fili cadano nello scafo della barca, una piccola fessura viene realizzata dal loro lato superiore.

Passaggio 5. Fissaggio dei motori.
Inoltre, l'autore torce i coperchi sulle bottiglie, dal momento che non si attorcigliano bene; ho dovuto usare la colla a caldo. I fili vengono spinti attraverso i fori predisposti sulle bottiglie.

Passaggio 6. Caso.
Una scatola di plastica si attacca a due bottiglie. In questa capacità per l'elettronica, è possibile praticare fori per i fili o trattenerli attraverso il retro della scatola. I fori per i fili sulle bottiglie sono isolati con adesivo hot melt.

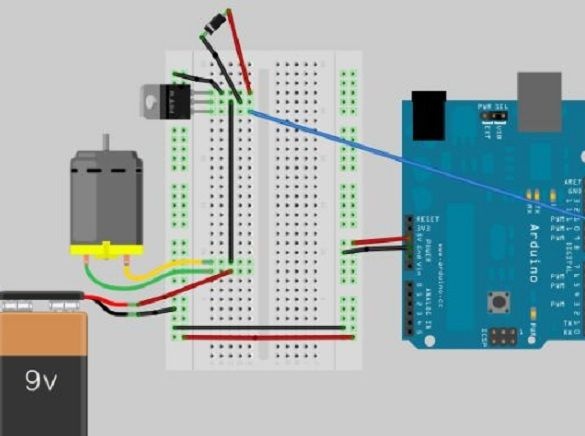
Passaggio 7. Schema elettrico.
Il circuito utilizza un transistor TIP 120 come interruttore (è possibile utilizzare transistor MOSFET o Darlington simili). È usato per cambiare il carico quando consuma una grande quantità di corrente, poiché Arduino non ha abbastanza potenza per i motori. Questo circuito è assemblato per il primo e poi per il secondo motore (non è necessaria un'altra batteria per il secondo motore).
Passaggio 8. Sensori.
Il sensore a ultrasuoni è ottimo per la parte anteriore della barca, avverte di ostacoli sulla strada. Le fotocellule si comportano come antenne e vengono utilizzate per far galleggiare la barca alla luce.I pulsanti sui lati sono utilizzati come sensori di ostacoli. È inoltre possibile modificare il codice e utilizzare altri sensori, come l'infrarosso.

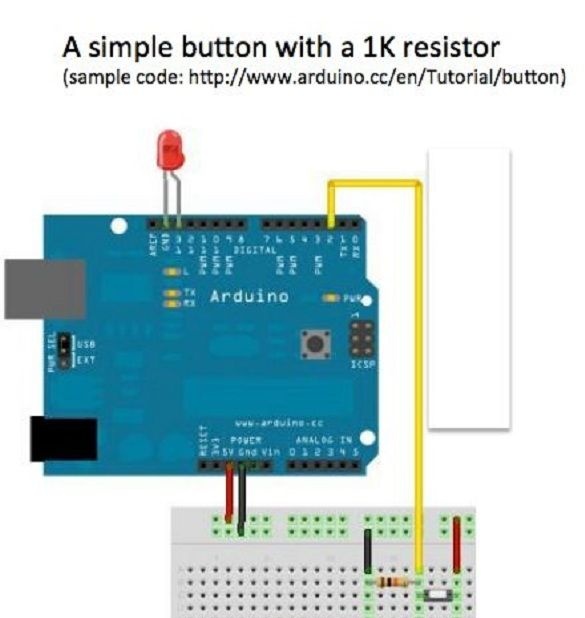
Passaggio 9. Schemi per sensori.
Il diagramma mostra la connessione di un semplice pulsante e una resistenza 1K. Lo schema per entrambi i pulsanti viene ripetuto, i pulsanti vengono posizionati su entrambi i lati della barca. Saranno responsabili di modificare il movimento della barca in caso di collisione.
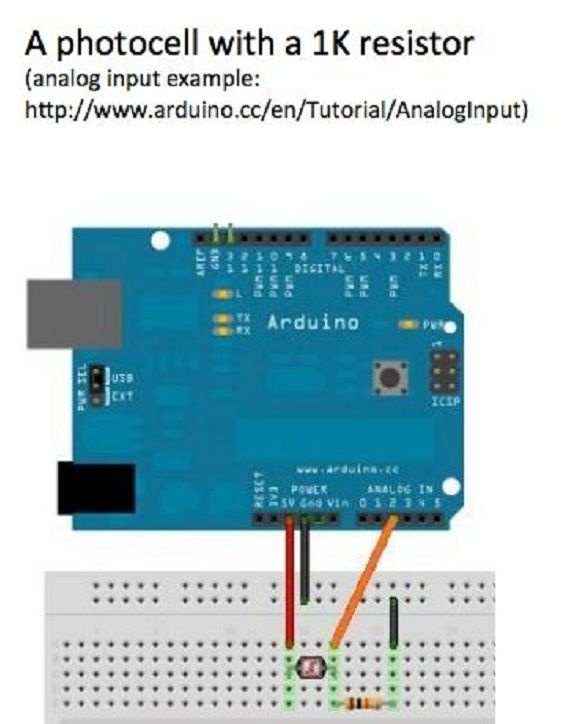
La figura seguente mostra un circuito con una resistenza 1K e una fotocellula. L'autore l'ha eseguita 2 volte e ha posizionato le fotocellule sui lati opposti della barca.
Passaggio 10. Codice del programma.
L'autore ha fornito l'opportunità di scaricare il suo codice per l'uso, fornendo così le funzionalità di base per coloro che assembleranno tale barca. Il codice include il supporto per fotocellule, telemetro e pulsanti. La barca cercherà di evitare gli ostacoli davanti a sé e si gira nella direzione opposta quando incontra ostacoli dal lato. Se non si desidera utilizzare l'intero set di sensori, ma solo alcuni di essi hanno un codice per ciascuno separatamente. Puoi scaricare tutti i codici sotto l'articolo.
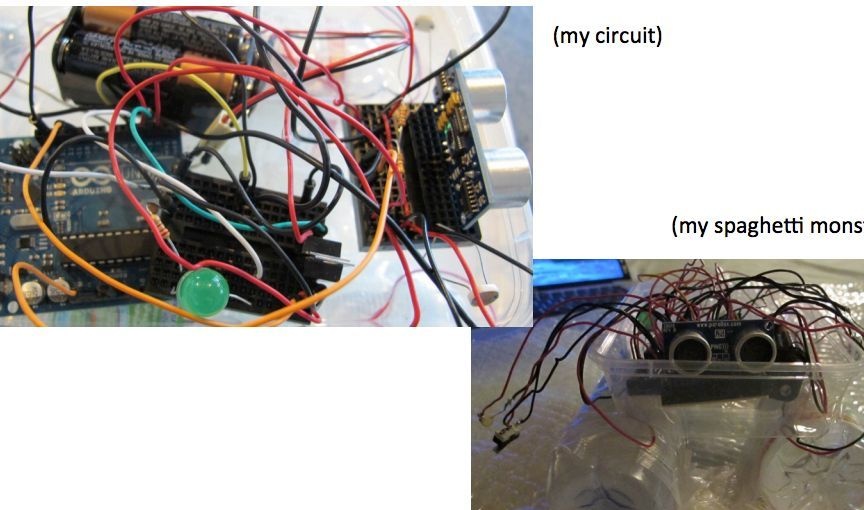
Passaggio 11. Assemblaggio della barca.
Circuito assemblato, Arduino e batterie sono confezionati.
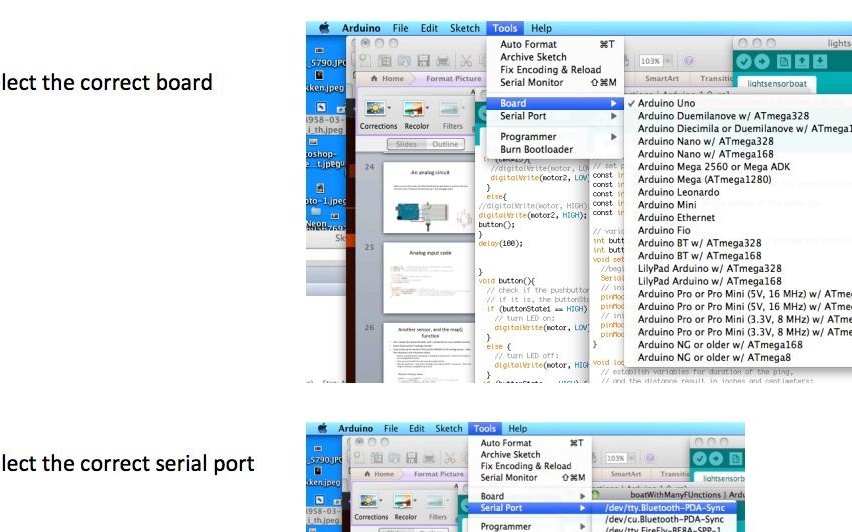
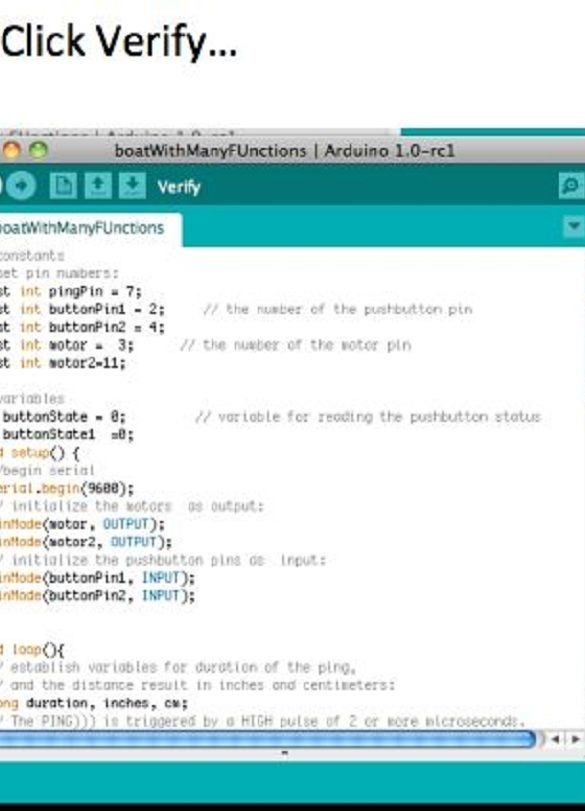
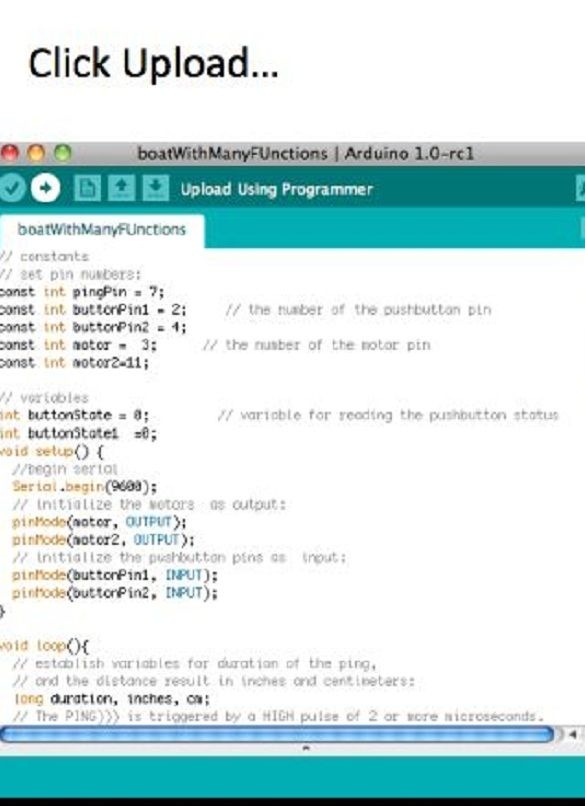
Passaggio 12. Scarica lo schizzo.
Successivamente, si apre l'IDE di Arduino, scegliendo il file e la porta corretti, dopodiché l'autore ha compilato e caricato il codice sul controller.
Passo 13. Resistente all'acqua e prova.
L'autore ha inoltre isolato tutti i potenziali luoghi di ingresso dell'acqua con colla a caldo. Isolati anche tutti i fili da corto circuito. Il contenitore con Arduino è coperto con la stessa scatola e sigillato con nastro isolante. Le eliche sono collegate ai motori. Qui la barca è pronta, ora puoi iniziare i test in acqua.



Video con una prova preliminare della barca: