Una caratteristica interessante di questo robot è che a causa del movimento pulsato, consuma energia piuttosto economicamente.

Materiali e strumenti per il montaggio:
- un foglio di PCB con uno spessore di 1-1,5 mm (foglio su un lato);
- saldatore con saldatura;
- fili;
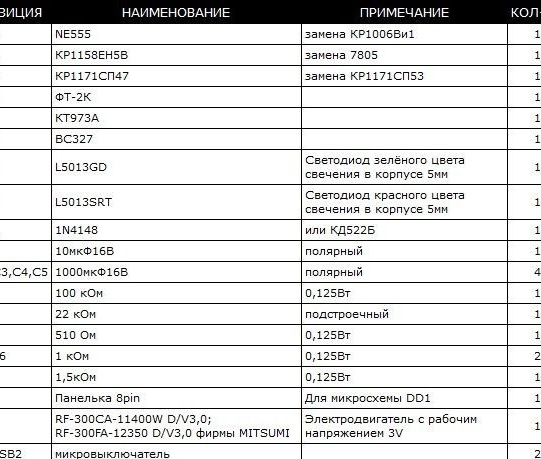
Tutti gli elementi radio possono essere visualizzati nella tabella.
Come funziona il robot e cosa può fare
Immediatamente dopo aver acceso l'alimentazione, il robot inizia a funzionare, insieme a questo, un LED lampeggia su di esso, indicando che il generatore di impulsi funziona correttamente. Il robot risponde alla luce, ciò è dovuto al fatto che una fotocellula è installata su di essa. Se accendi una torcia su un robot, funzionerà molto velocemente.
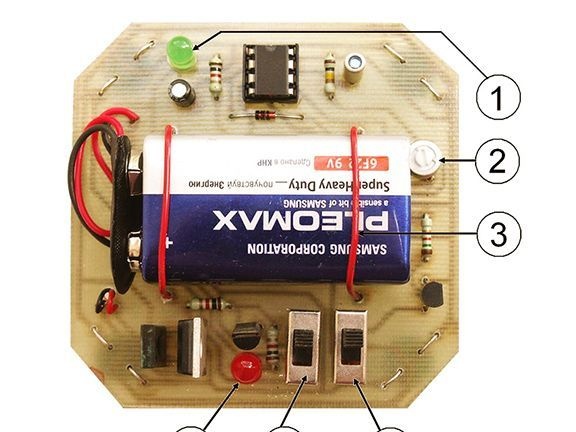
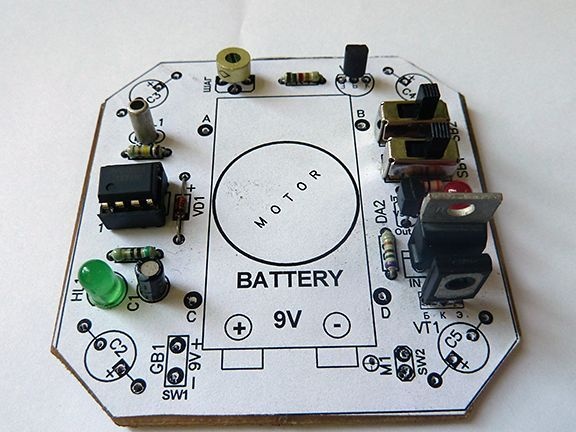
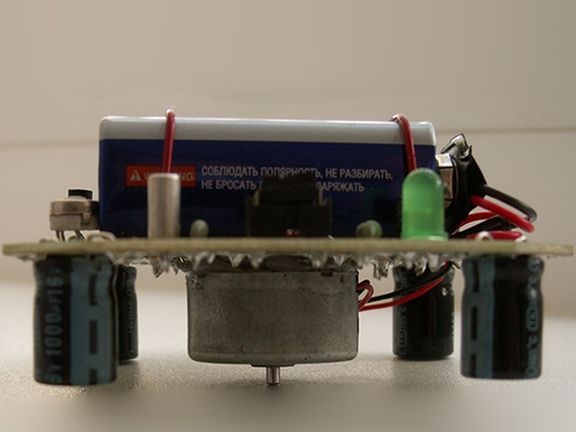
Nell'immagine, i numeri indicano gli elementi del robot e le loro funzioni sono descritte:
1. LED HL1. Segnala il funzionamento del generatore di impulsi.
2. Resistenza di trimmer R2, possono regolare la larghezza degli impulsi.
3. Elemento di montaggio della batteria.
4. Selettore modalità robot Smart-Sumo.
5. Interruttore per spegnere il robot.
6. Il LED HL2 si accende quando la batteria è scarica.
Ora qualche parola sulle modalità robot.
La modalità SMART attiva la fotoresistenza del robot, ovvero inizia a rispondere alla luce. Più luminosa è l'illuminazione, più attivamente si muove il robot. Al buio, il robot viaggia molto lentamente o si spegne completamente.
Per quanto riguarda la modalità SUMO, quando viene attivata, il robot inizia a catturare vari piccoli oggetti e spostarli, ad esempio può essere una scatola di fiammiferi. Questa funzione può essere abilitata nelle competizioni tra robot simili. Per abilitare la funzione, utilizzare l'interruttore SB2.
Il robot può muoversi in due opzioni: guidare o camminare. Puoi creare qualsiasi combinazione di movimento che si alternerà.Durante la guida, il motore ruota in modo uniforme e il robot si muove in modo molto fluido. Quando si cammina, gli impulsi vengono comunicati al motore e si muove a scatti.
Un altro fatto interessante è che il robot è dotato di un sistema di alimentazione di backup. Ad esempio, quando la batteria inizia a scaricarsi, il robot attiva un circuito di alimentazione in cui la tensione arriva direttamente al motore. Ciò consente di aumentare le prestazioni complessive del robot di circa due volte.
Processo di assemblaggio del robot:
Primo passo. Il principio del robot
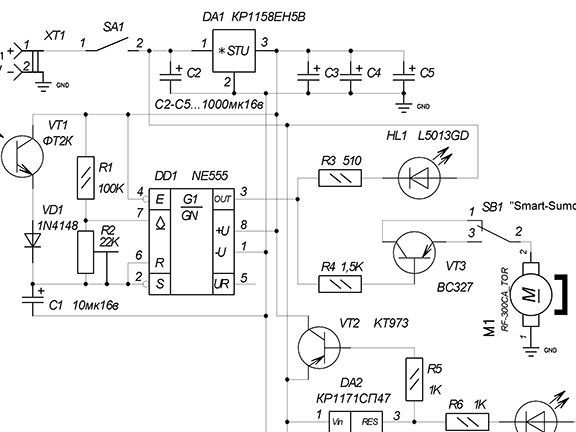
Il generatore di impulsi viene creato su un chip timer NE555. Quando la luce entra nel fototransistor VT1, la sua resistenza e frequenza diminuiscono e, a questo proposito, cambia anche la durata dell'impulso sul chip DD1. Per quanto riguarda il segnale di uscita DD1, gli impulsi di corrente rettangolari vengono emessi da esso, vengono alimentati al motore M1 e al LED HL1 in antifase. Pertanto, il LED si accende quando si formano delle pause tra gli impulsi e il motore M1 viene acceso con un impulso negativo. Ulteriori dettagli su come funziona il robot possono essere visti nel diagramma.
Secondo passo Montiamo componenti radio
Per creare una lavagna, è necessario stampare il disegno su un foglio A4. Per la traduzione del bottino, è necessario stampare un foglio termico, per questo viene utilizzata una stampante laser. Dopo aver creato la scheda, è necessario controllare le tracce per un corto circuito. Quindi, un circuito stampato su carta viene preso e incollato alla scheda in modo che tutti i fori coincidano. Bene, allora puoi procedere con l'installazione di elementi radio. Dopo aver montato il socket, è possibile installare il chip DD1 al suo interno. Il fotoresistore VT1 deve essere installato su tutta la lunghezza delle gambe. Dopo aver installato il fotodiodo, deve essere piegato in modo che il lato anteriore sia rivolto verso l'alto.

Terzo passo Installare condensatori e motore di riferimento
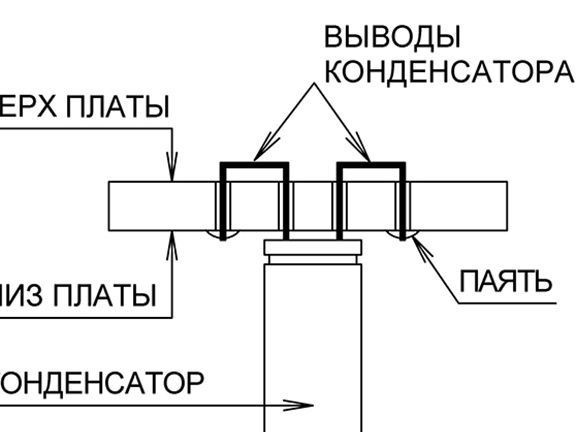
I condensatori chiamati C2, C3, C4, C5 sono installati sul lato delle tracce live. Le gambe dei condensatori sono inserite nei fori, quindi dall'altro lato sono piegate e saldate.
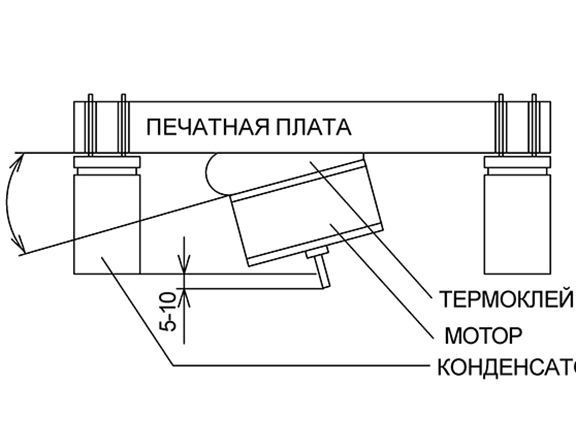

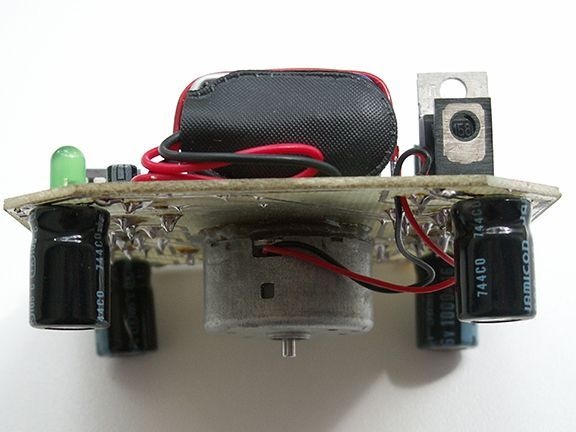
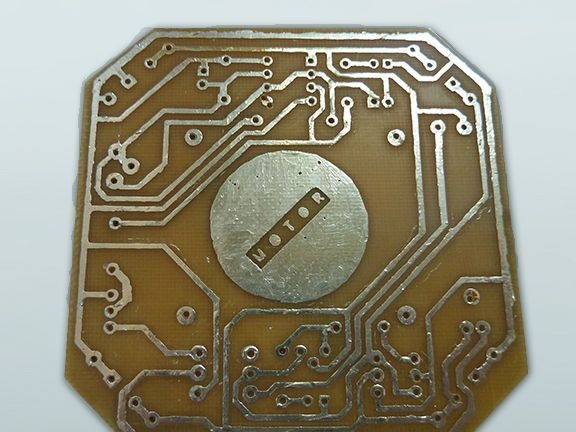
L'autore installa il motore usando la colla a caldo. Viene applicato dal lato dei binari che trasportano corrente, il luogo di installazione del motore è indicato da un cerchio. Puoi riscaldare la colla con un saldatore. Bene, dopo che il motore è stato incollato, puoi saldare le sue uscite alla scheda.
Fase quattro Ruota del robot
Affinché il robot possa interagire meglio con la superficie durante lo spostamento, si consiglia di mettere un pezzo di cambrico sul suo albero. Con tale raffinatezza, il robot si muoverà sulla superficie molto più velocemente, man mano che la presa migliora.
Fase cinque Installazione della batteria
Affinché la batteria non scivoli sul robot durante il suo funzionamento, deve essere ben riparata. A tal fine, utilizzare graffette lunghe isolatamente. I morsetti a forma di U che si adattano alle dimensioni della batteria devono essere piegati dai fermagli e quindi saldati alla scheda.

Step Six Accensione e controllo del robot
Il robot viene acceso dall'interruttore SB1, mentre dovrebbe iniziare a muoversi e anche il LED HL1 lampeggerà su di esso. Successivamente, è necessario controllare le modalità del robot, compresi gli interruttori corrispondenti.
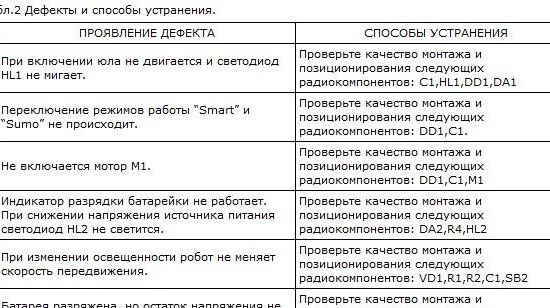
Se il robot non funziona come dovrebbe, a volte il problema è molto semplice da trovare. Soprattutto per questi scopi, l'autore racchiude una piastra speciale per la risoluzione dei problemi.