

Buona giornata agli amanti dell'arduino! Mentre era appeso in Internet, mi sono imbattuto in un articolo piuttosto divertente su come creare un manipolatore manuale che ripete i movimenti della mano di una persona, ispirato dalla semplicità e dall'effetto fatto in casa fatto in casa ha deciso di raccoglierlo. Ho trovato i sensori di piegatura su Alliekspress per la mano del trasmettitore e sono morto un po ', una cosa si aggirava nella regione di $ 15-20, si scopre che 5 di questi sensori per una sola mano costeranno $ 75-100 e questo è solo per i sensori! Dopo qualche tempo, ho imparato come realizzare tali sensori fallo da soloRisulta essere molto semplice ed economico.
Quindi per il sensore di piega abbiamo bisogno di:
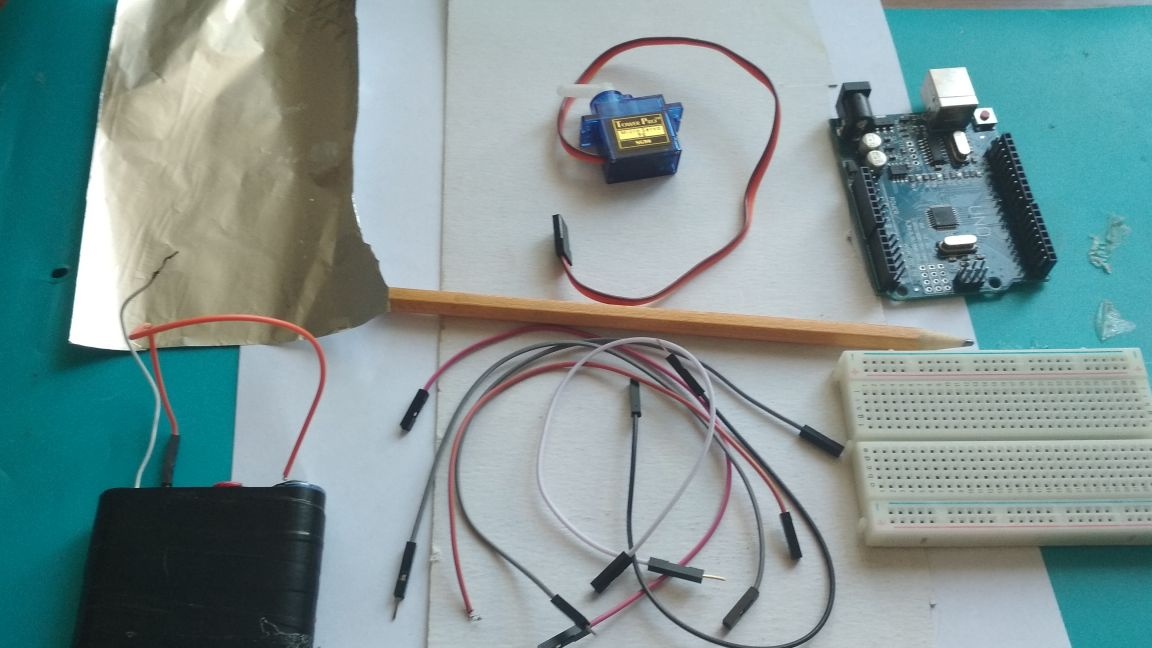
Dress-Up Arduino Uno ()
-breadboard
- cavi di collegamento come "padre-madre" o "padre-padre"
-servomotor
-karton
-bumaga
-folga
-karandash
- alimentazione da 6 a 12 volt (utilizzo 4 batterie collegate in serie a 1,5 V)
Dagli strumenti di cui abbiamo bisogno:
pistola per colla
-Scissors
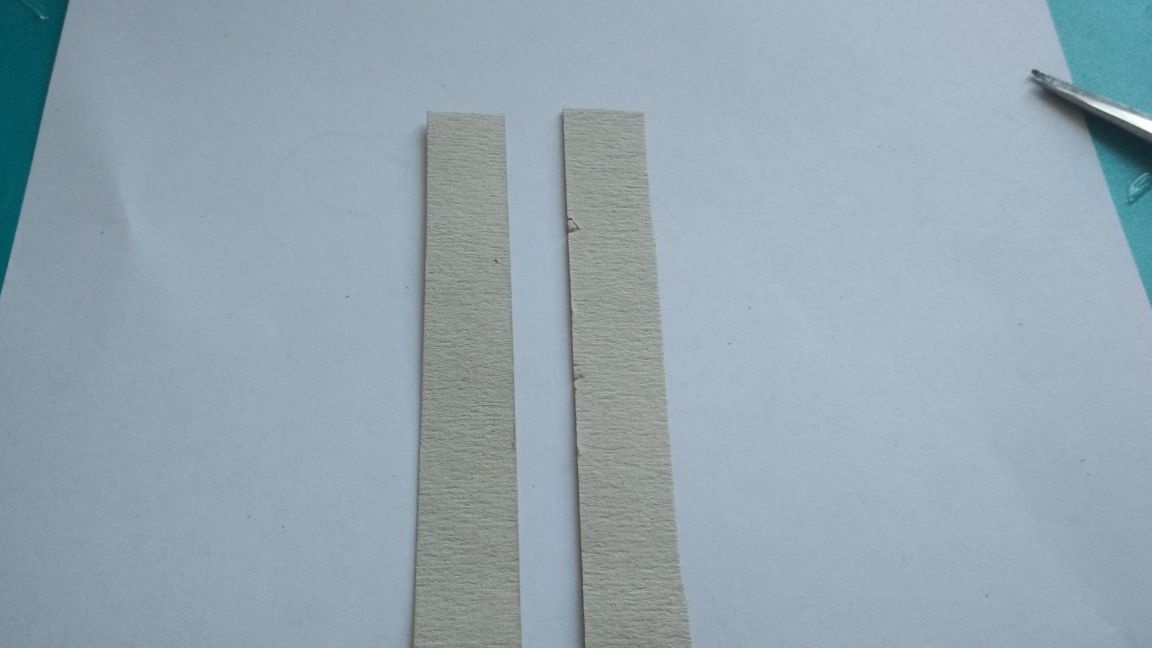
E quindi la prima cosa che ritagliamo dal cartone sono due strisce più lunghe di 2 cm rispetto all'indice e larghe circa 1 cm:

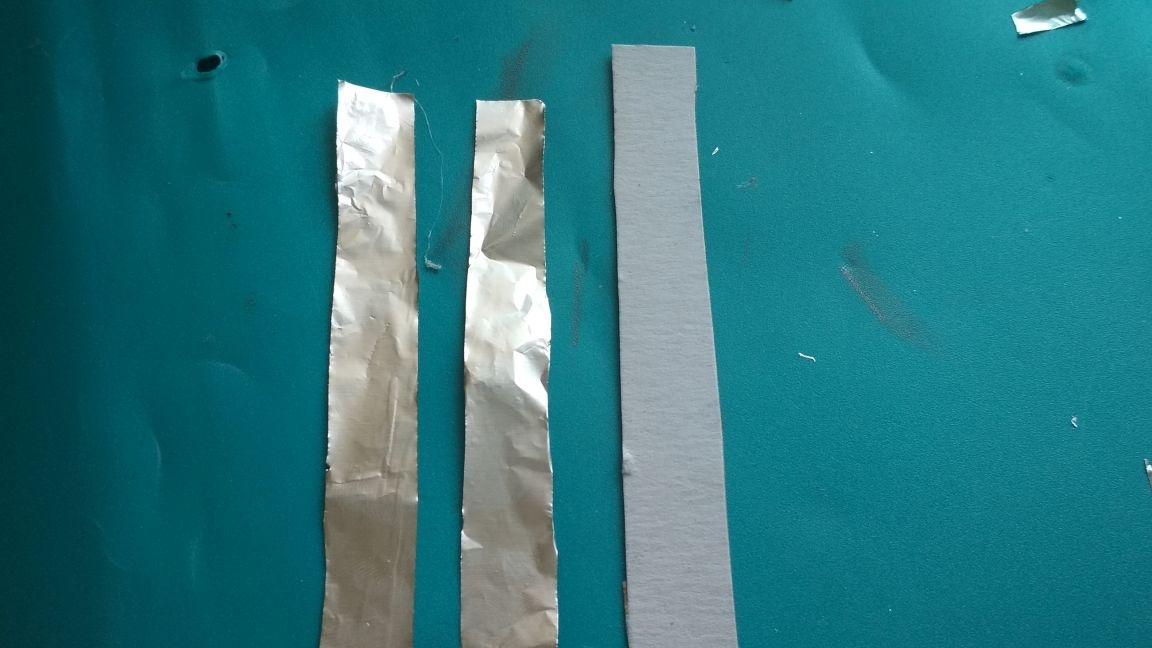
Taglia uno della stessa striscia di carta solo un po 'meno:

Disegna la matita su entrambi i lati della striscia di carta nel miglior modo possibile:


Taglia due strisce di pellicola più piccole della carta:
Incollali sulle strisce di cartone come mostrato nella foto:

Dai fili di collegamento "padre-madre" tagliamo l'uscita "madre" e puliamo le loro estremità dall'isolamento:
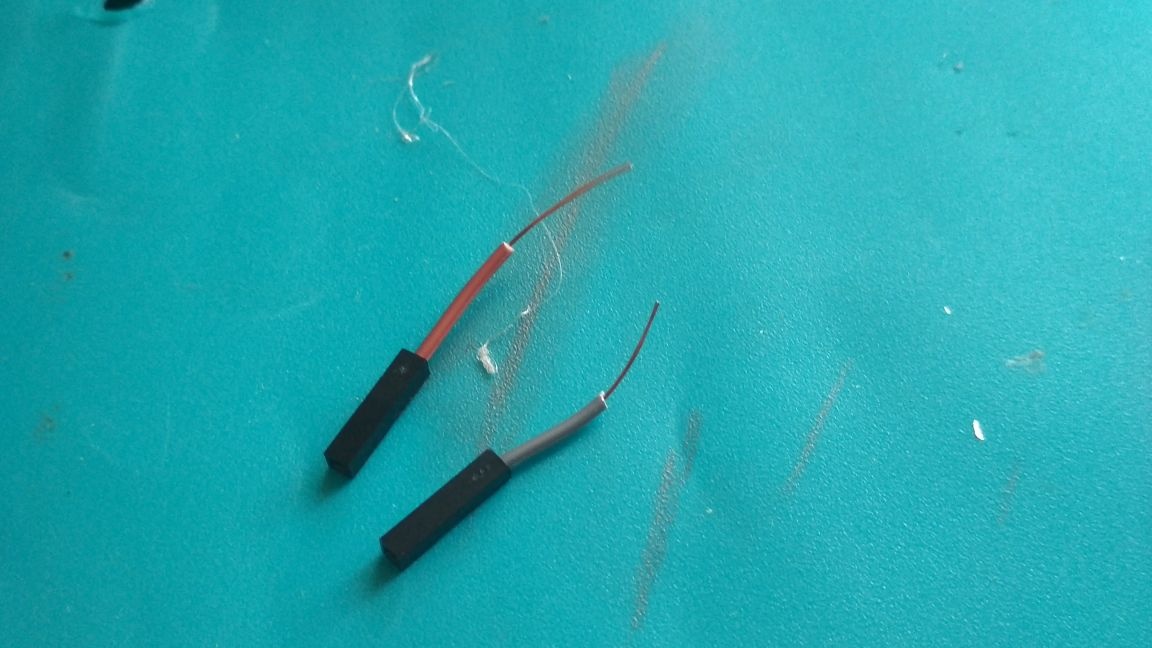
Alleghiamo da nastro o saldatura:

Attacciamo una striscia di carta a una delle metà, in modo che sia a contatto con la lamina, quindi copriamo con la seconda metà del lato con la lamina, premiamo e incolliamo sui lati:

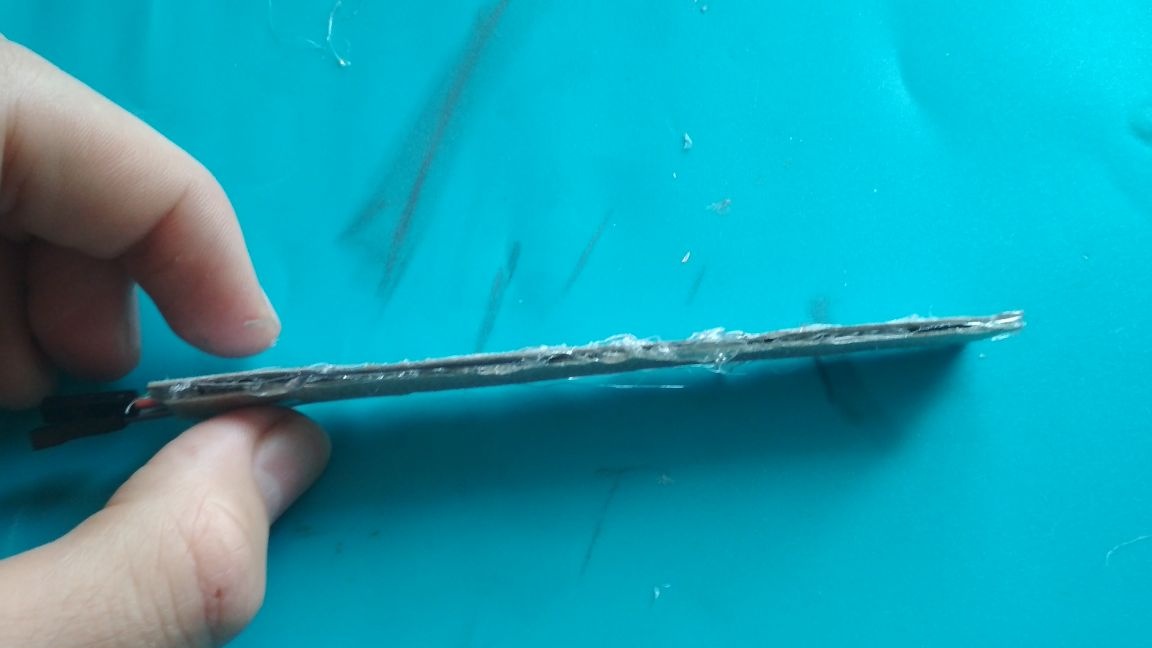

Realizziamo tali "serpenti" su ogni lato con l'aiuto di colla a caldo, sono necessari in modo che il design sia più flessibile

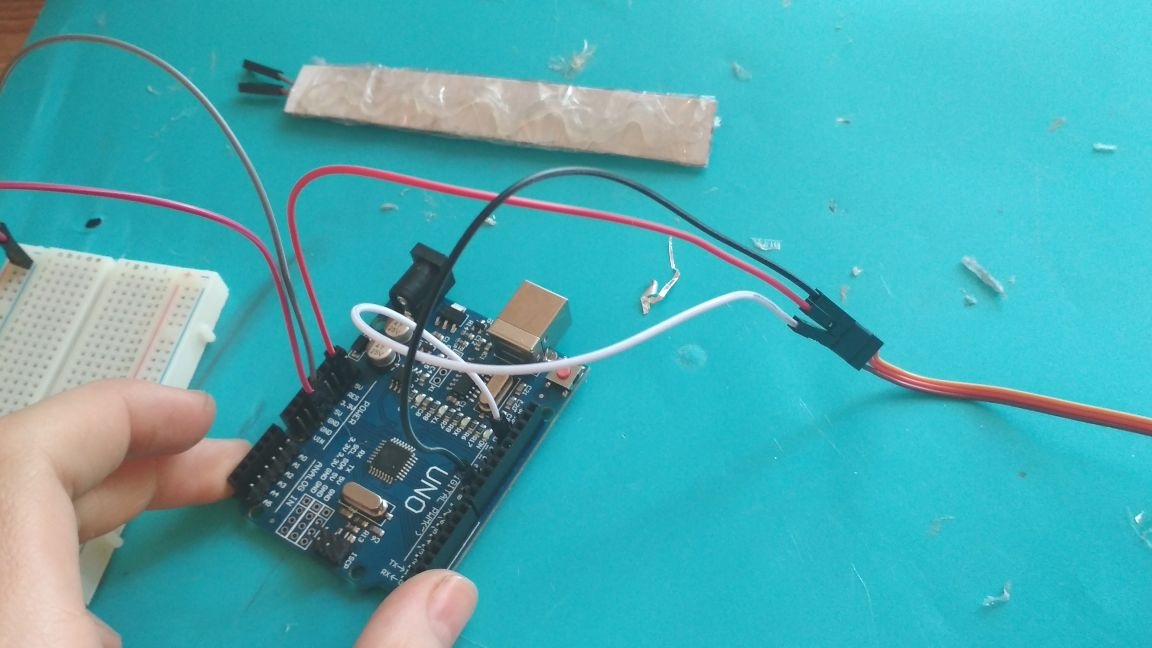
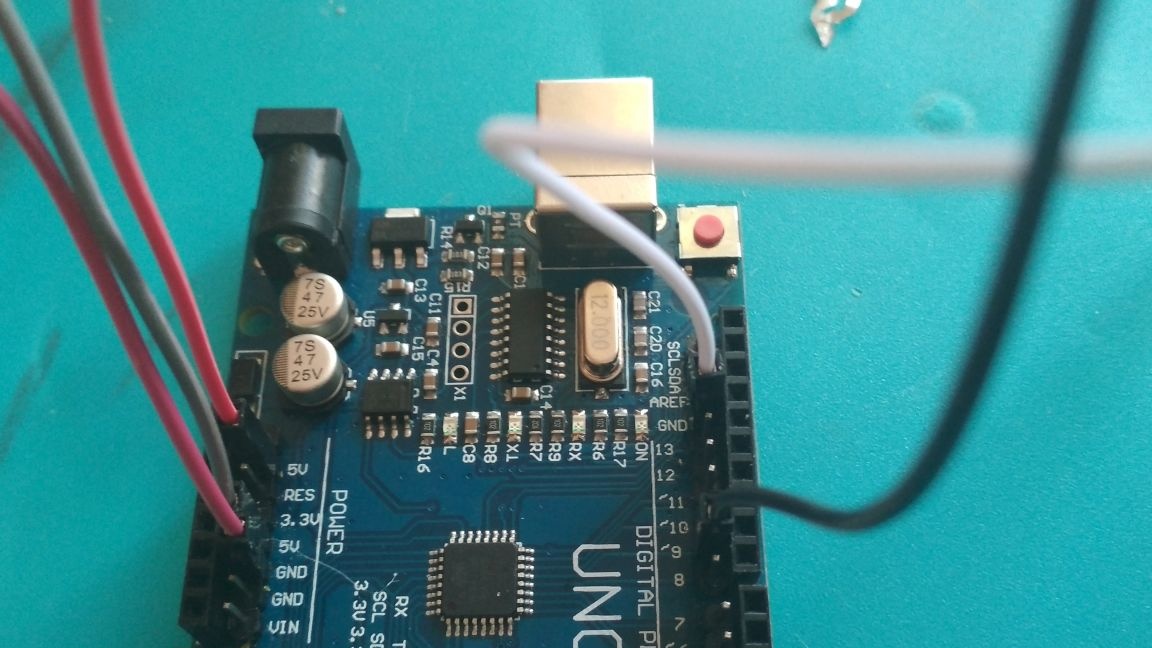
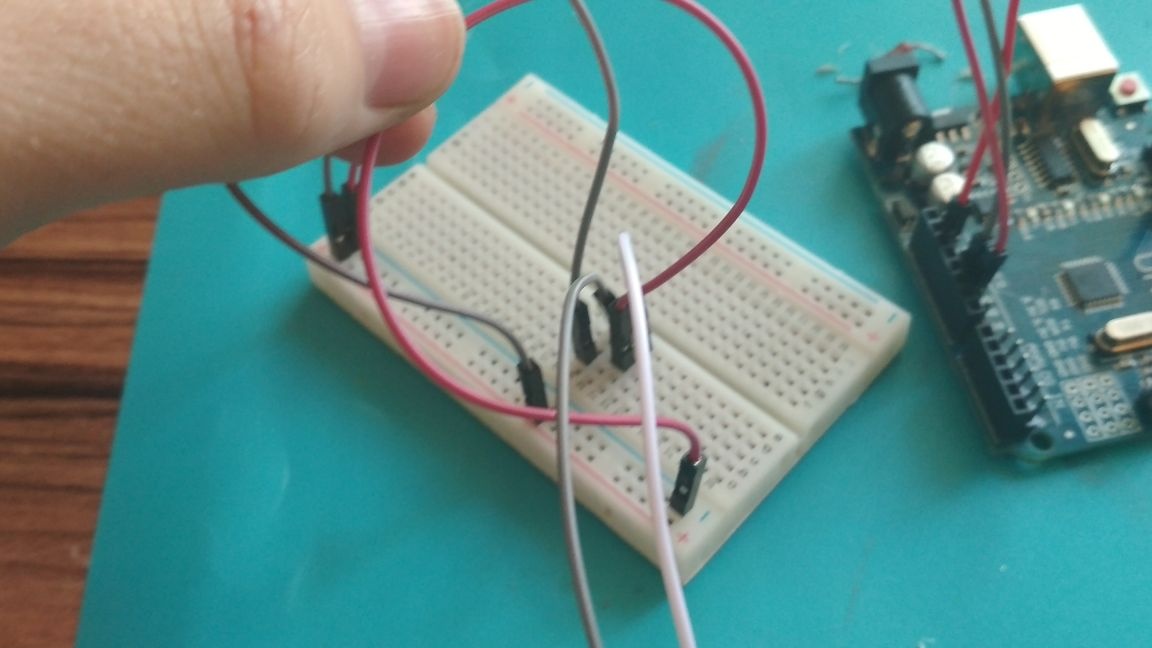
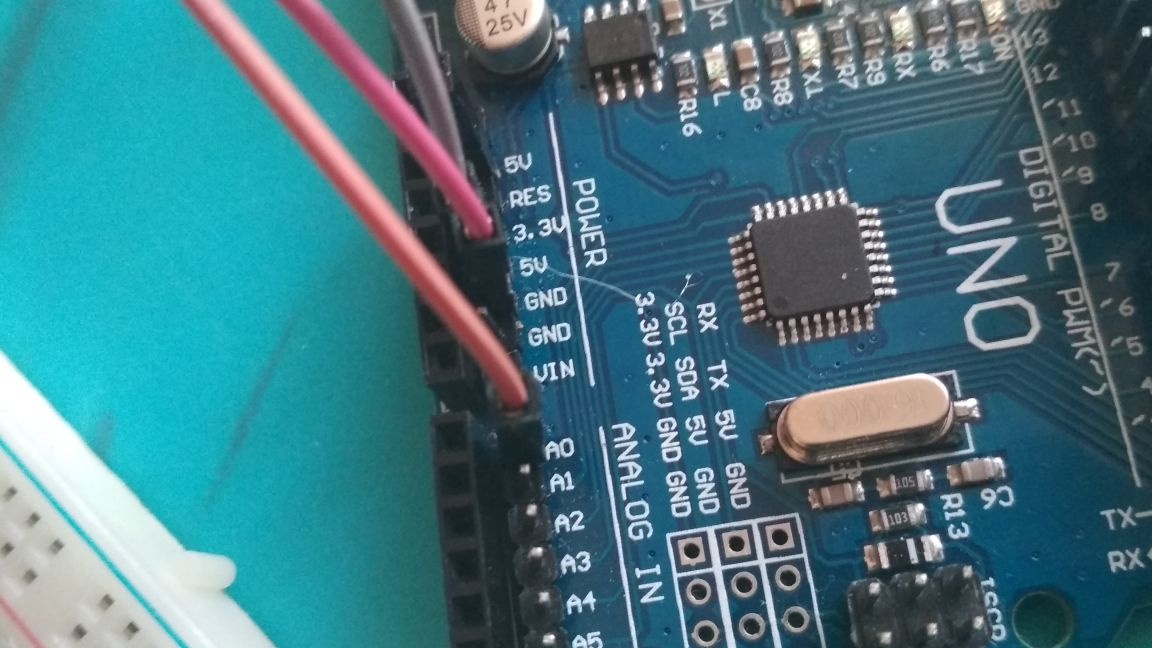
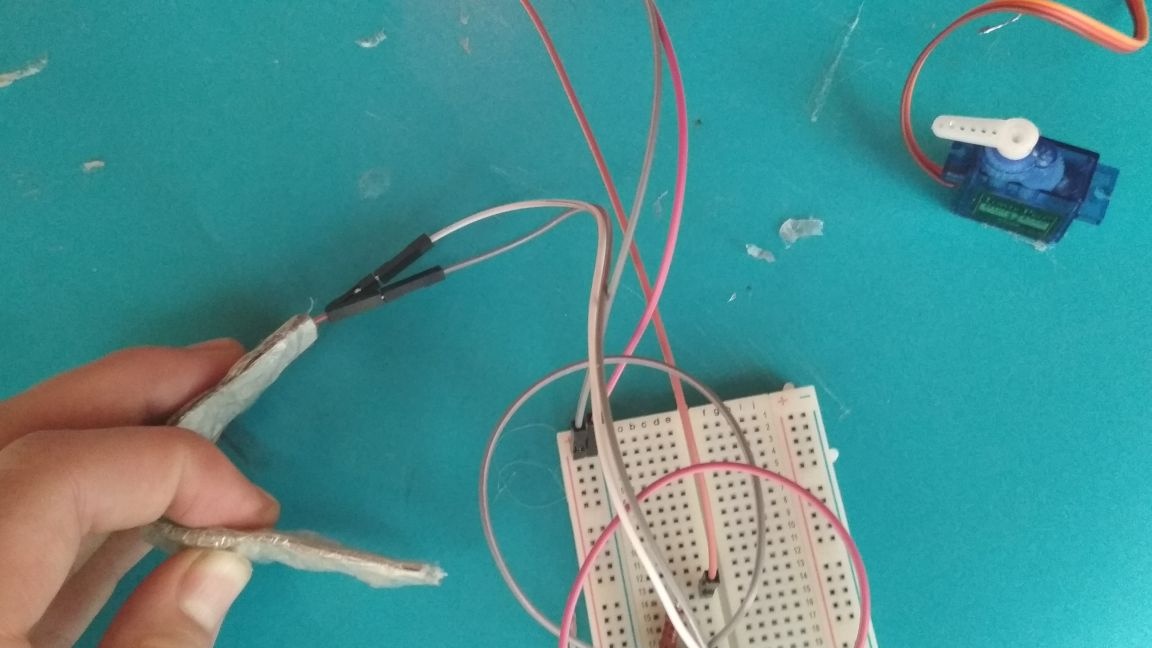
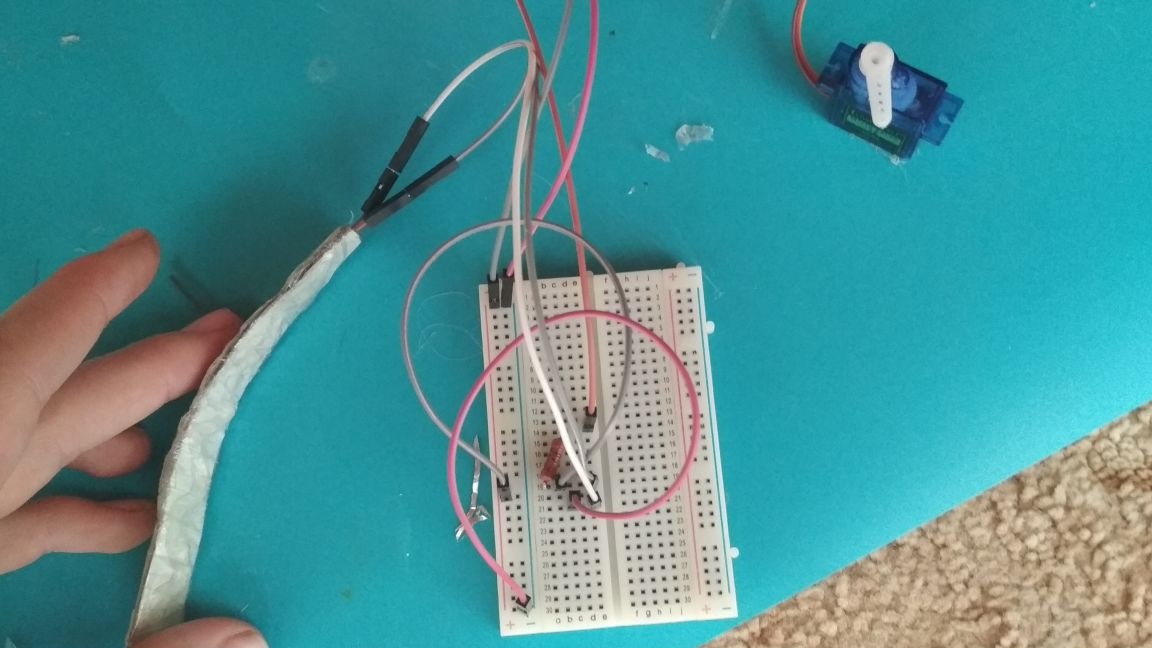
Prendiamo un arduino e colleghiamo l'uscita 5v al plus della breadboard e Gnd al meno:

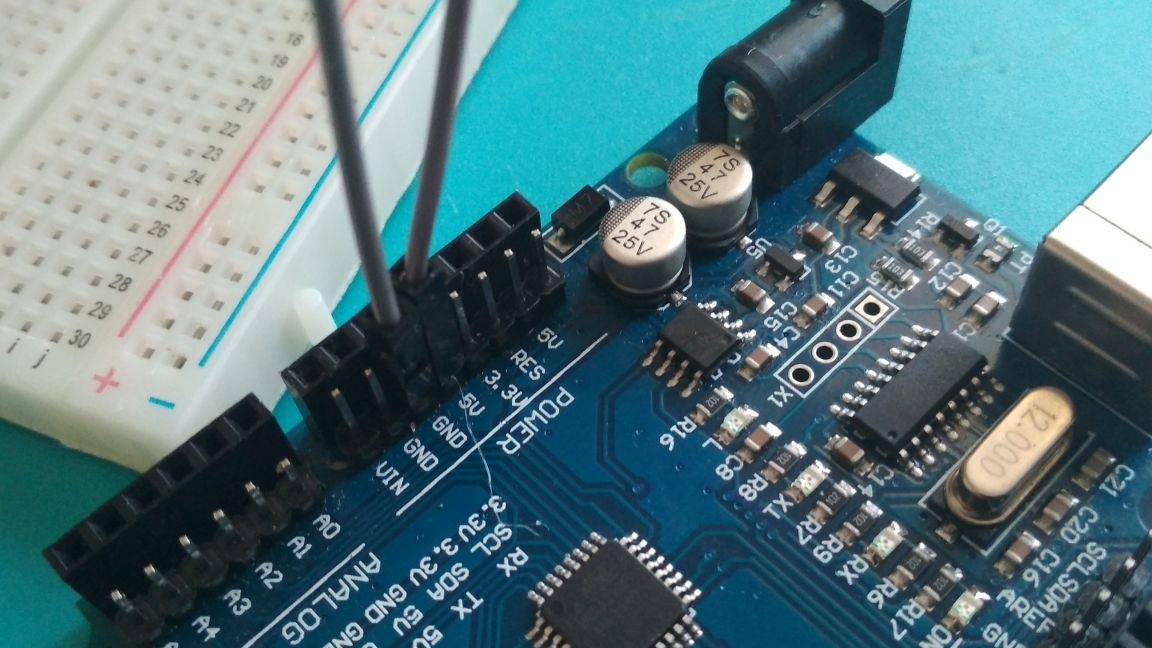
Aggiungi i fili di collegamento al servomotore e collegalo all'Arduino come segue:
Filo marrone a gnd
rosso a 5v
arancione a 9 pin
Al nostro sensore di piega, aggiungi due fili da papà a papà

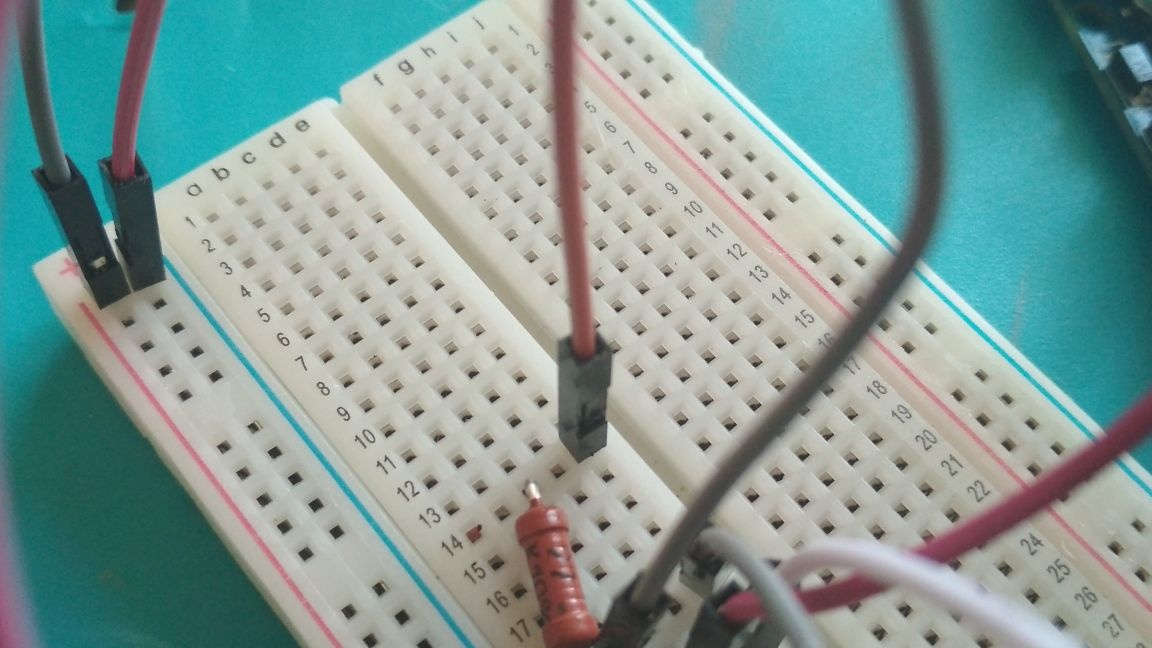
Collegali alla breadboard:
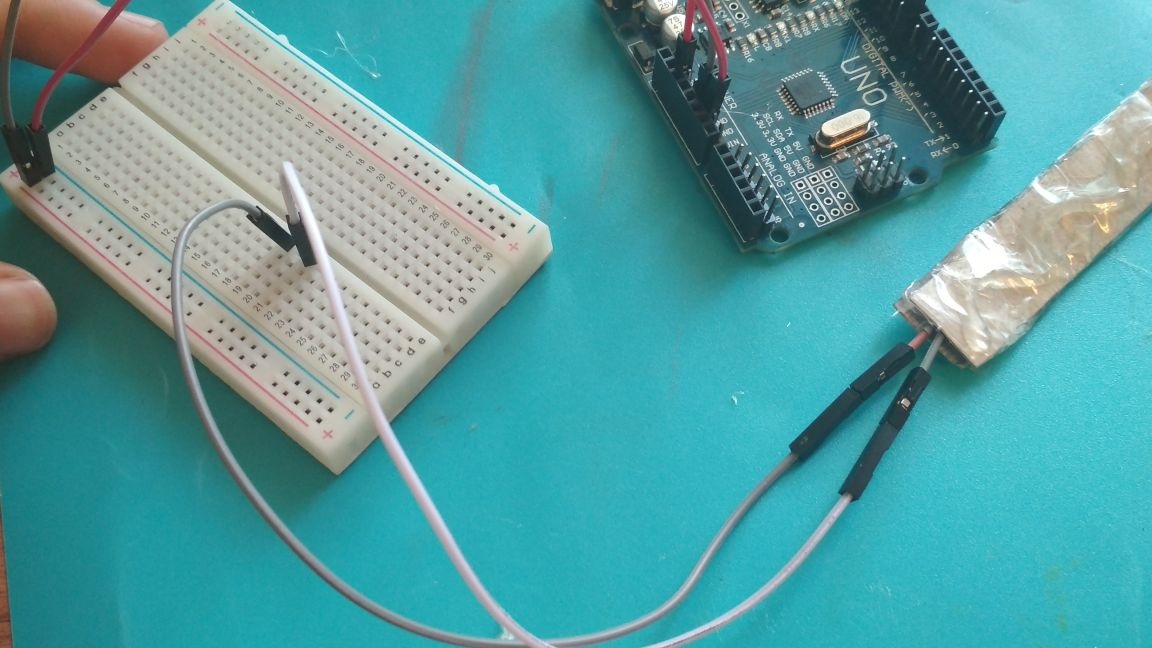
Una delle estremità del sensore è collegata al plus della breadboard tramite una resistenza da 22 kg ohm (purtroppo l'ho mescolata e collegata ad un'altra uscita, ma ciò non ha risposto all'operabilità), e l'altra alla meno:
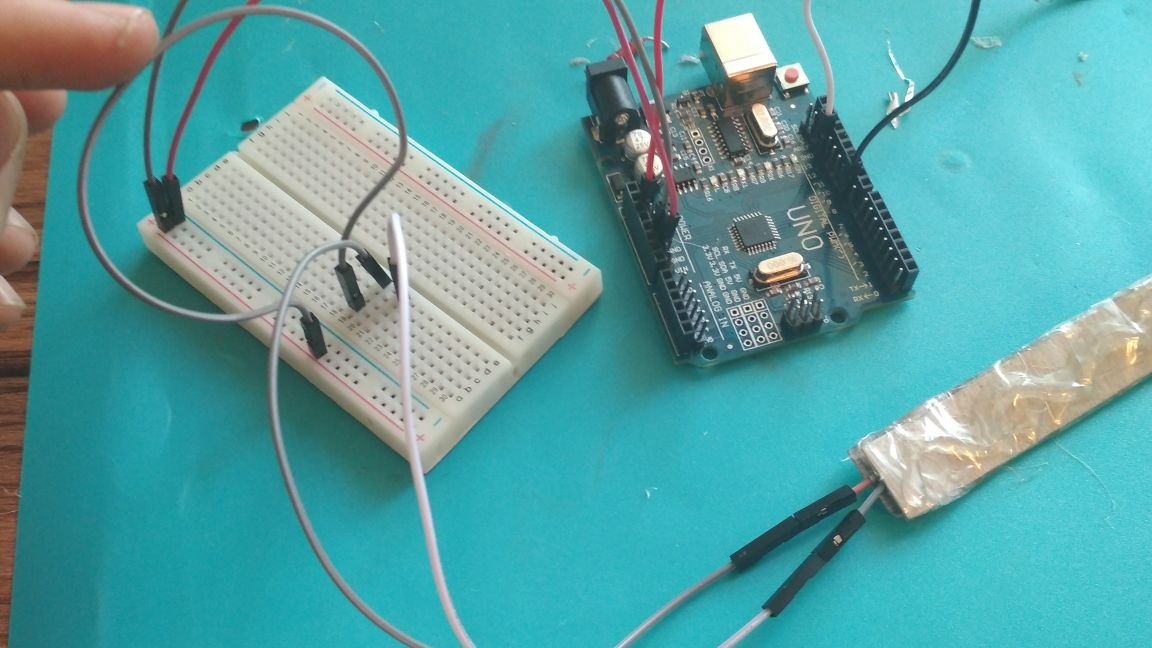
Su quella breadboarda una linea su cui si trova l'estremità del sensore collegata al plus, aggiungi un altro filo e lo emette all'uscita A0 su Arduino:
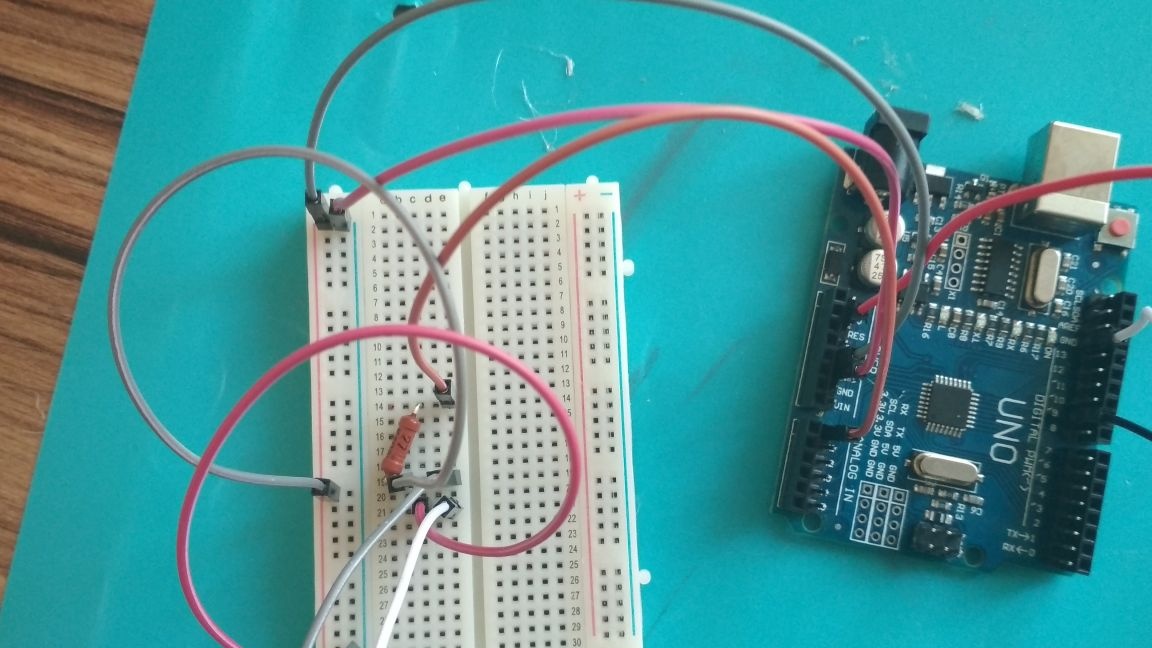
Ora connettiamo Arduino al computer, avviamo l'IDE Arduino e cariciamo il seguente schizzo:
#include
Servo servo1;
const int flexpin = 0;
void setup ()
{
Serial.begin (9600);
servo1.attach (9);
}
void loop ()
{
int flexposition;
int servoposition;
flexposition = analogRead (flexpin);
servoposizione = mappa (posizione flessibile, 1018, 1023, 0, 90);
servoposizione = vincolo (servoposizione, 0, 90);
servo1.write (servoposizione);
Serial.print ("sensor:");
Serial.print (flexposition);
Serial.print ("servo:");
Serial.println (servoposizione);
ritardo (1000);
}Attiva il monitor porta a cui è collegato Arduino e carica lo schizzo

Ora osserviamo i cambiamenti che si verificano nel monitor della porta quando il nostro sensore si piega, vediamo che 1023 è 90 gradi e 1020 e 1019 sono 0, quindi nel mio caso, cambio il numero 1018 nello schizzo su 1020, puoi averne uno diverso. Ora 1020 è 0 gradi e 1023 è 90 gradi. Dopo tutte le modifiche, carica il nuovo schizzo personalizzato sulla scheda Arduino


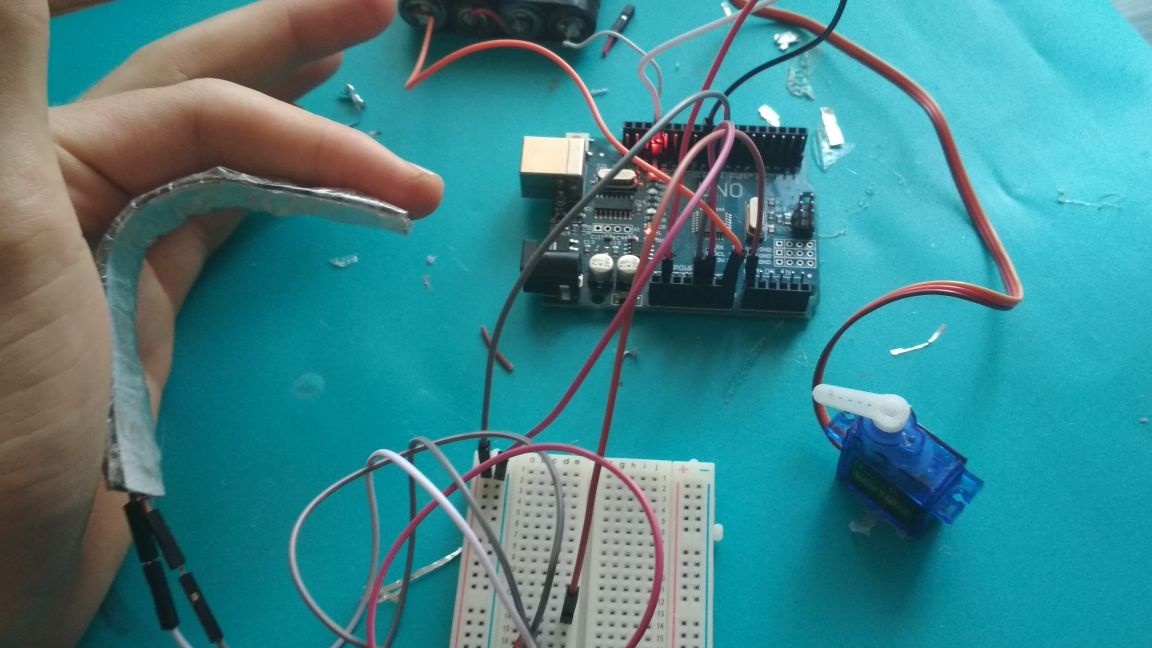
Bene, tutto qui! Il nostro sensore di piegatura più semplice e, soprattutto, economico è pronto!
Se tutto è fatto correttamente, quando il sensore è piegato, il servoazionamento farà una rotazione di 90 gradi e, quando esteso, tornerà nella sua posizione originale. Naturalmente, l'accuratezza di questo sensore è inferiore a quella acquistata, ma è adatta a progetti che non sono particolarmente confusi e, inoltre, se tutto viene fatto con cura e messa a punto, risulterà quasi come acquistato. Spero che questo articolo sia utile a qualcuno.
Grazie a tutti per l'attenzione!