
Voglio costruire qualcosa come un ATV leggero o simile basato su un motore ciclomotore.
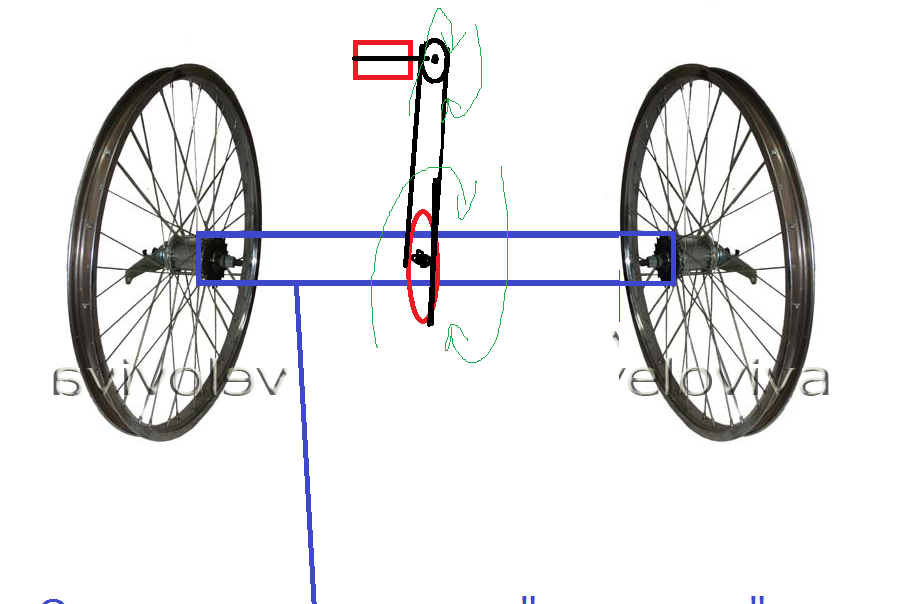
Sto pensando a come creare un analogo del differenziale. E se prendessi le due ruote posteriori della bici e saldassi l'asse ai "pignoni".
Teoricamente, quando si guida su un asse rettilineo, l'asse sarà bloccato da solo, e questo è fantastico, dato che ci sarà una buona abilità di fondo, solo una ruota non girerà in caso di inceppamento.
Quando si gira (diciamo a sinistra), la ruota destra si "disconnetterà" dall'asse, poiché compie un numero maggiore di giri e la ruota sinistra trasmetterà la coppia dal motore. MA! Si scopre il contrario, la coppia per una svolta migliore di cui abbiamo bisogno sulla ruota destra.
Anche se in questo caso non ci sarà un "blocco ponte" e l'ATV dovrebbe girare normalmente?
Sebbene se immagini la situazione in cui ci siamo fermati, abbiamo girato il volante e iniziato, prima del momento del movimento entrano immediatamente in azione due ruote e quando si guida una viene scollegata. In generale, come a mio avviso, l'idea è almeno unica))