


Ho preso parte del mio progetto dalle istruzioni di assemblaggio di Lego Technic 42049 e Lego Technic 42041. Il resto è la mia improvvisazione. Per il controllo, userò il modulo Bluetooth associato al dispositivo o al computer Android. Quindi abbiamo bisogno di:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- Driver del motore L9110S
- 1 servoazionamento SG-90
- Modulo Bluetooth HC-05 o equivalente
- USB-UART per firmware arduino
- Cambio motore 6v 1: 150 100 giri / min
- 2 LED
- 2 resistori 150 ohm
- Condensatore 10v 1000uF
- 2 pettini a fila singola PLS-40
- Induttore 68mkGn
- 6 batterie NI-Mn 1.2v 1000mA
- Connettore papà-mamma a due pin da cablare
- Homutik
- Fili di diversi colori
- saldatura
- Colofonia
- saldatore
- Bulloni 3x20, dadi e rondelle per loro
- Bulloni 3x40
- Bulloni 3x60
Passaggio 1 Assemblaggio dell'assale posteriore
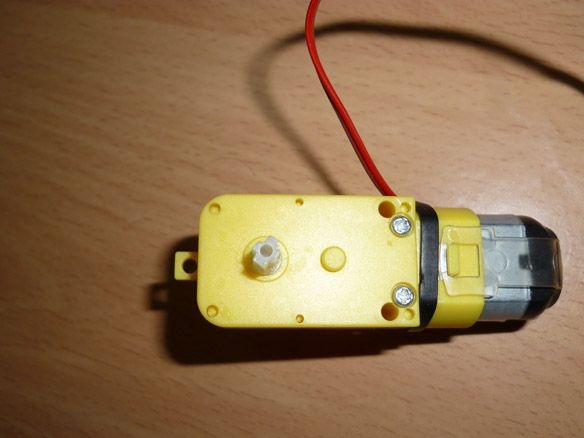
Andando avanti - all'indietro verrà eseguito un motoriduttore con un motore a 6 V, un rapporto di trasmissione di 1: 150 e una velocità minima di 100 giri / min. Puoi provare un altro rapporto di trasmissione, ma, secondo me, questo è ottimale. L'asse del cambio su entrambi i lati deve essere inciso a forma di croce e mettere su dettagli lego:
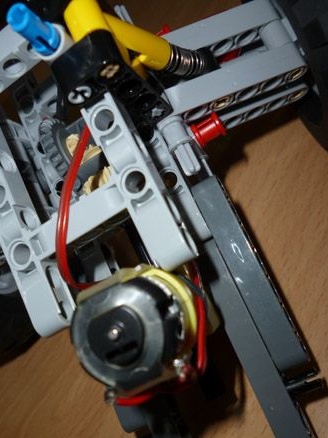
Successivamente, raccogliamo la base dell'asse posteriore secondo le istruzioni di Lego 42029 parte 1, a partire da 3 pagine a 8 incluso. E aggiungi alcuni dettagli in modo da poter installare il motore e il cambio.
Visualizza file online:
Visualizza file online:



Passaggio 2 Montaggio dell'assale anteriore
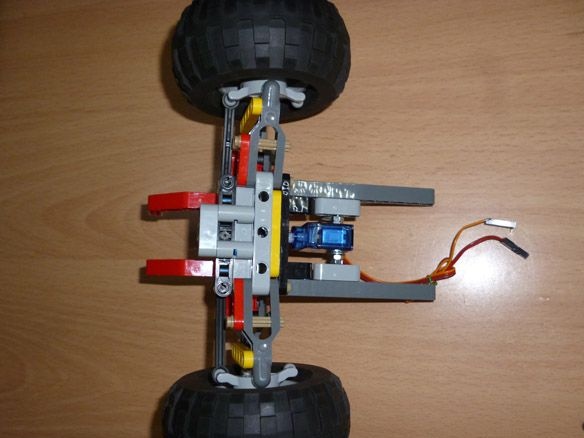
Montiamo la parte anteriore della sospensione secondo le istruzioni della Lego 42029 parte 1, da pagina 21 a 23. Prendiamo il trapezio dalla seconda parte di Lego da pagina 6 a 11. Il Servo SG-90 è adatto per girare le ruote. Per fissarlo sul nostro modello, è necessario perforare attentamente, in modo da non toccare le parti interne del servo, un foro passante con un diametro di 3,2 mm o semplicemente tagliarlo con un coltello da cancelleria. E anche tagliare le parti sporgenti ("ali" per il fissaggio). Inseriamo un bullone nel foro realizzato e lo fissiamo con dadi. Sull'asta del servo mettiamo una leva con una parte avvitata da lego:





Passaggio 3 Montaggio della base e della cabina
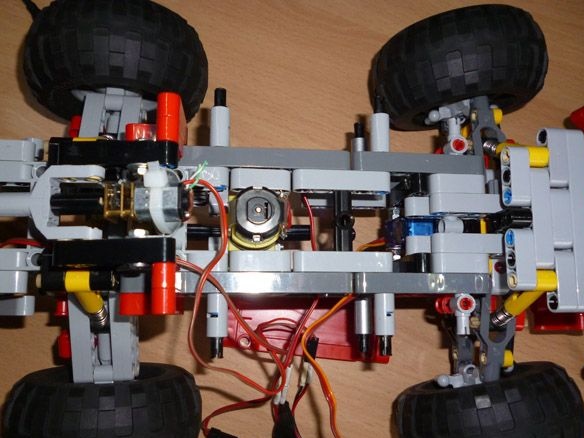
Colleghiamo entrambi i ponti come mostrato nella foto:
Montiamo la cabina secondo le istruzioni di Lego 42041. A partire dalle pagine 39 a 47 della prima parte. Più lontano da pagina 5 a 28 della seconda parte. Così come il paraurti alle pagine 38-43 della seconda parte delle istruzioni.
Visualizza file online:
Visualizza file online:


Visualizza file online:
Visualizza file online:
Passaggio 4 Impianto elettrico
Per il controllo, utilizzeremo Arduino Pro Mini e il modulo Bluetooth. Pro Mini può essere sostituito con qualsiasi altra scheda Arduino. Ho scelto la Pro Mini, quindi è la più piccola. Il driver del motore è necessario per collegare il motore.
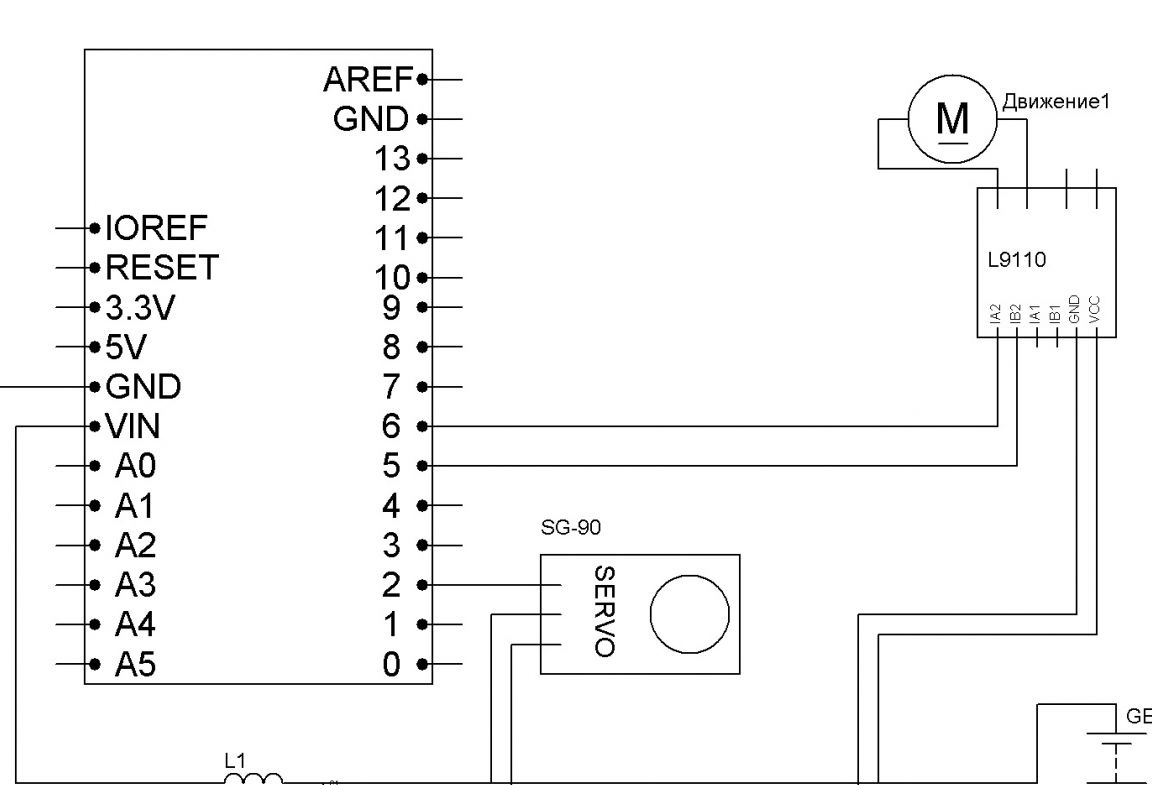
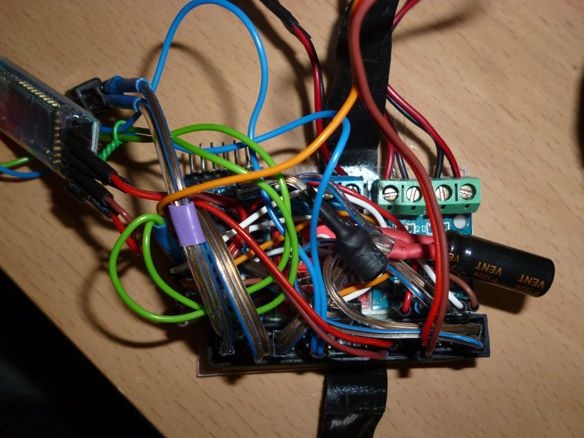
Collegamento di tutti i componenti con cavi madre-madre Dupont. Potenza - 6 batterie NI-Mn 1.2v 1000mA collegate in serie. Un condensatore di qualsiasi bassa potenza, troverete anche un induttore, è necessario stabilizzare la potenza del microcontrollore. Gli anodi dei due LED sono collegati ad arduino a 4 pin, i catodi a GND. I resistori sono selezionati per i LED utilizzati. Per comodità, riavvolgi le batterie con del nastro adesivo.

Incolliamo tutto su un nastro biadesivo sulla base di:
Mettiamo il nostro elettricista tra le ruote e chiudiamo:
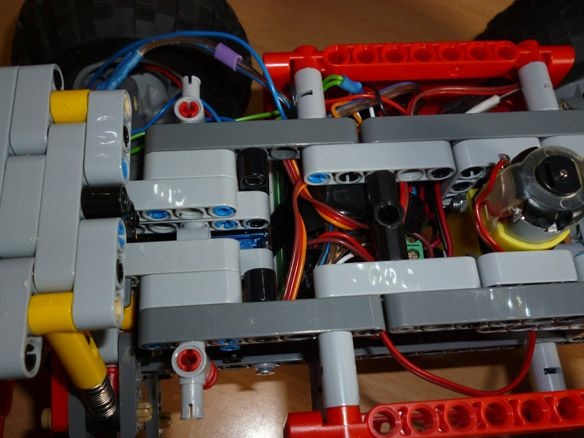
Aggiungi un paio di tratti:


Passaggio 5 Impostazione Bluetooth
I moduli Bluetooth più convenienti oggi sono HC-05 e HC-06. Sono abbondanti nei negozi online cinesi. Le differenze tra loro sono che il primo può funzionare sia in modalità master (slave) che in modalità slave (master). Il secondo è un dispositivo puramente slave. In altre parole, HC-06 non può rilevare un dispositivo associato e stabilire una connessione con esso, può solo obbedire al master.
Brevi caratteristiche dei moduli:
- Chip Bluetooth - BC417143 prodotto da
- protocollo di comunicazione - Specifica Bluetooth v2.0 + EDR;
- raggio di azione - fino a 10 metri (livello di potenza 2);
- Compatibile con tutti gli adattatori Bluetooth che supportano SPP;
- La quantità di memoria flash (per la memorizzazione di firmware e impostazioni) - 8 Mbit;
- la frequenza del segnale radio - 2,40 .. 2,48 GHz;
- interfaccia host - USB 1.1 / 2.0 o UART;
- consumo di energia - la corrente durante la comunicazione è di 30-40 mA. Il valore corrente medio è di circa 25 mA. Dopo aver stabilito la comunicazione, il consumo di corrente è di 8 mA. Non è disponibile la modalità di sospensione.
Di solito, i moduli sono venduti come due schede saldate insieme. Quello più piccolo è un modulo di fabbrica, ampiamente utilizzato in vari elettronico dispositivi. Grande: una breadboard speciale per il fai-da-te.
Ecco l'aspetto dei moduli fai-da-te HC-05 e HC-06:
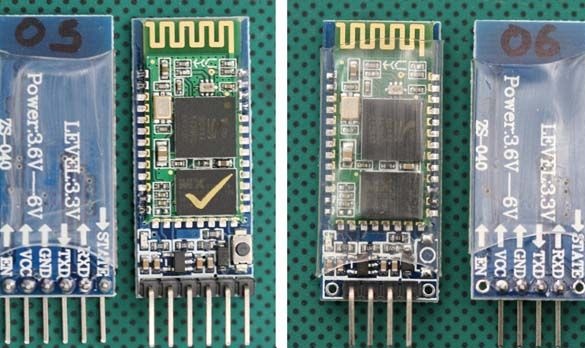
In linea di principio, è possibile utilizzare qualsiasi modulo che ti piace. Un modulo senza breadboard costa meno, ma dovrai occuparti dell'alimentazione a 3,3 V del modulo e tormentarti saldando i fili al modulo. Ho scelto l'ottimale, secondo me, nel rapporto prezzo / funzionalità HC-06.
Ci colleghiamo come segue:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Per un corretto funzionamento, il modulo deve essere configurato. Configureremo i comandi AT immessi nella finestra del terminale. Fornisco un esempio di installazione del modulo HC-05. Se si dispone di un'impostazione diversa potrebbe essere diversa. Affinché il nostro modulo riceva i comandi, per prima cosa facciamo lampeggiare Arduino con il seguente firmware:
In questo caso, Arduino funge da ponte tra i computer e il modulo. Nel firmware, utilizzo la libreria SoftwareSerial. Alle alte velocità, funziona in modo instabile. Se si desidera l'alta velocità, è possibile collegare il modulo direttamente ai contatti Arduino RX e TX e riscrivere il firmware. Ma nel mio caso, lavoreremo con il modulo a una velocità di 9600. Quindi dopo il firmware, apri il terminale e inserisci:
“AT” (senza virgolette) dovrebbe arrivare la risposta “OK” (significa che tutto è collegato correttamente e il modulo funziona)
"AT + BAUD96000" (senza virgolette) dovrebbe arrivare la risposta "OK9600".
Se hai la risposta giusta, vai al passaggio successivo.
Passo 7 Firmware
Per scrivere il firmware e il firmware stesso, utilizzo l'IDE di Arduino. La versione attuale per oggi è la 1.8. In realtà firmware:
Passaggio 8 Configurare il telefono.
Su un telefono Android, è necessario installare un programma per controllare il robot tramite Bluetooth. Ce ne sono molti. Puoi inserire "Bluetooth Arduino" in Google Play e scegliere a tuo piacimento. Mi è piaciuto il controller BT. Scarica e installa sul tuo telefono o tablet Android. Successivamente, attraverso le impostazioni di Android, è necessario stabilire una connessione con il nostro modulo. La password per la connessione è “1234” o “0000”. Quindi, configurare il programma per i comandi appropriati. L'elenco è sotto.
Passaggio 9 Installazione del computer (se necessario)
Se necessario, o semplicemente comodità per il controllo, è possibile utilizzare un computer o un laptop. Per fare ciò, il computer deve disporre di Bluetooth. Stabiliamo la comunicazione con il nostro modulo attraverso i controlli sul computer. Successivamente, abbiamo bisogno di un terminale per inviare comandi. Qualsiasi conveniente per te.Dopo aver registrato il firmware, il controllo viene eseguito dai seguenti pulsanti (comandi):
W - avanti
S - indietro
A - sinistra
D - giusto
F - stop
G - volante
K - fari
L - faro spento
L'inserimento costante di comandi è scomodo, quindi consiglio di utilizzare il programma per inviare comandi. Sto usando Z-Controller. Nel programma, selezionare la porta (porta COM attraverso la quale viene stabilita la connessione) e configurare le chiavi per i comandi. Imposta inattivo e intuitivo.
