
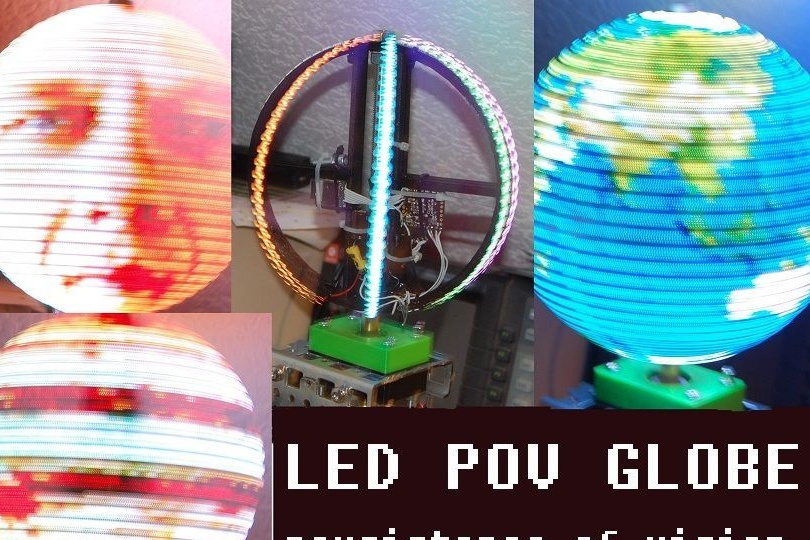
Questo tutorial spiega come costruire un globo POV con meno. elettronico componenti rispetto ad altri dispositivi simili. Attraverso l'uso di LED RGB con un controller APA102 integrato. Questo ti farà risparmiare la saldatura di numerosi fili. Puoi leggere di più su di loro. Questi LED non richiedono un driver aggiuntivo. Sono collegati direttamente al microcontrollore in due modi. Ciò consente di cambiare i LED molto rapidamente. Per ottenere un'immagine stabile, la sincronizzazione SPI arriva a una frequenza di 10 MHz. Un altro vantaggio di questo design è l'uso di una scheda flash, che memorizza l'immagine in formato BMP.
1 materiale richiesto

Per l'asse del globo avrai bisogno di:

1. Perno con filetto M8 e una lunghezza di 250 mm
2. Dado M8
3. Manicotto in ottone lungo 10 mm e 100 mm
4. Rondelle di plastica 8 mm 2 pezzi (file STL inclusi)
5. giunto per coloro che useranno il motore passo-passo NEMA 17
Per alimentare l'anello LED sull'albero, è necessario
1. cuscinetto a sfere 6300 (10x35x11)
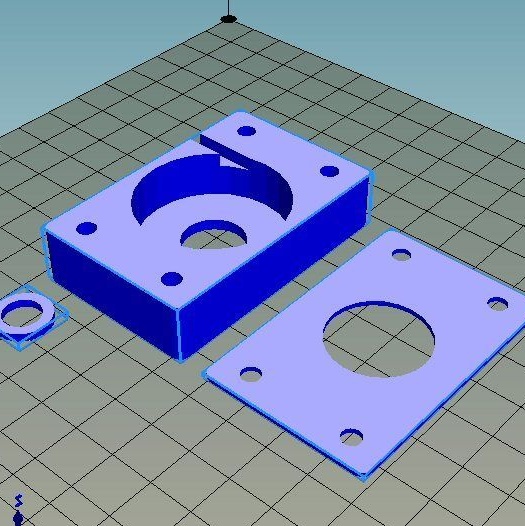
2. due staffe per cuscinetti. Stampato su una stampante 3d o in legno.
3. Quattro bulloni M4x40 con dadi
4. Suggerimenti sui fili 2 pezzi 8mm
5. con un diametro dell'albero di 5 mm
6. 4 bulloni M4 per il montaggio del motore
7. forse un fan ad esso.
In alternativa, puoi utilizzare qualsiasi motore con il giusto controllo di coppia e velocità. Il motore utilizzato in questo modello ha una coppia massima a una corrente di 50A, ma il consumo di corrente massimo durante il funzionamento è di soli 18A.
Per controllare il driver del servomotore, utilizzare
1.
2. due pulsanti
Alimentazione 12V per motore e 5V per LED. Come alimentatore, è possibile utilizzare la vecchia unità dal PC. È possibile acquistare un alimentatore 12v / 5A e collegarlo ad esso
Per l'anello LED avrai bisogno di:
1.664 LED 2 strisce da 32 pezzi
2. Condensatore 1000µF 10V
3. Sensore Hall e magnete
4. La resistenza di pull-up 1k, 10k
5. L'anello deve essere stampato su una stampante 3D o utilizzare un pezzo di tubo in PVC
6. Legami di plastica (100 mm)
7. Una buona colla che si attacca e non vola a 2500 rpm
Avrai anche bisogno di un microcontrollore ad elica Parallax. Oppure puoi usarne un altro il modello controller, ma in più a pagamento. Questo controller è programmato e lampeggiato come semplice Arduino. Sarà necessario un adattatore USB-TTL per programmare entrambi i controller.
Housing.
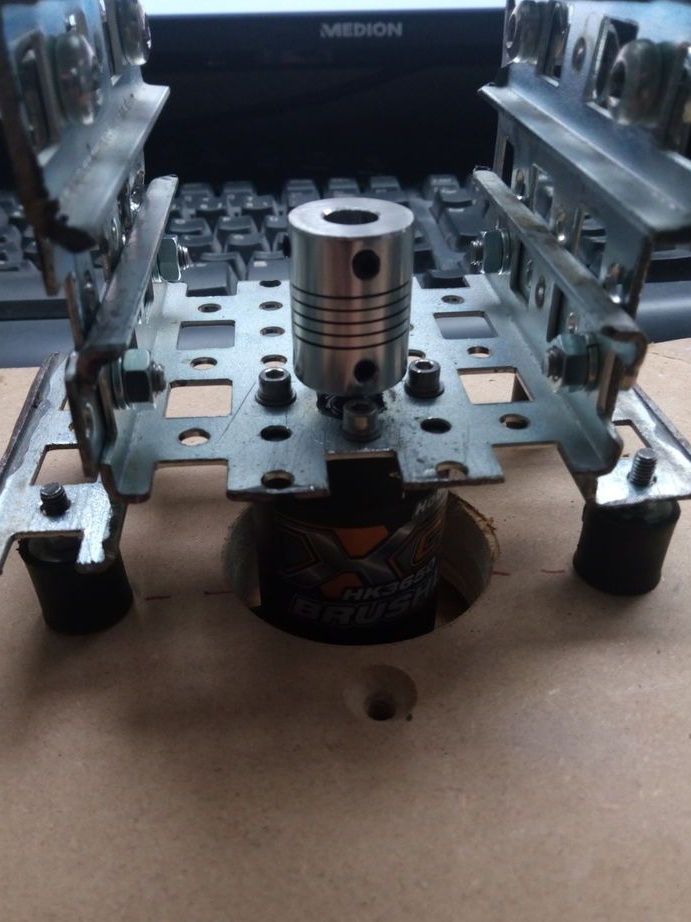
Alloggiamento per fatto in casa Puoi prendere abbastanza duro. La cosa più importante è che puoi fissare saldamente motore e cuscinetti.
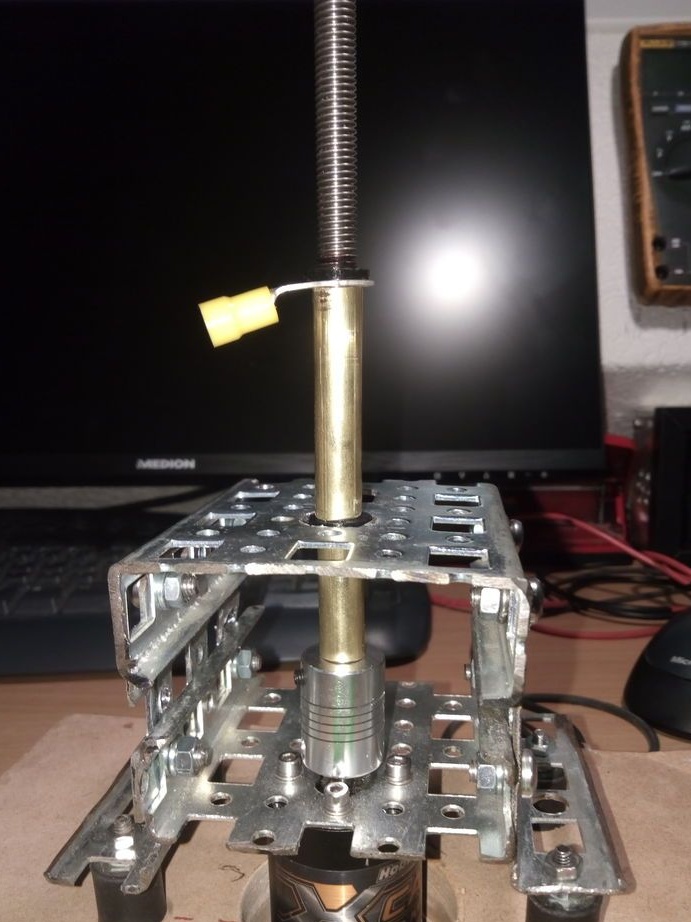
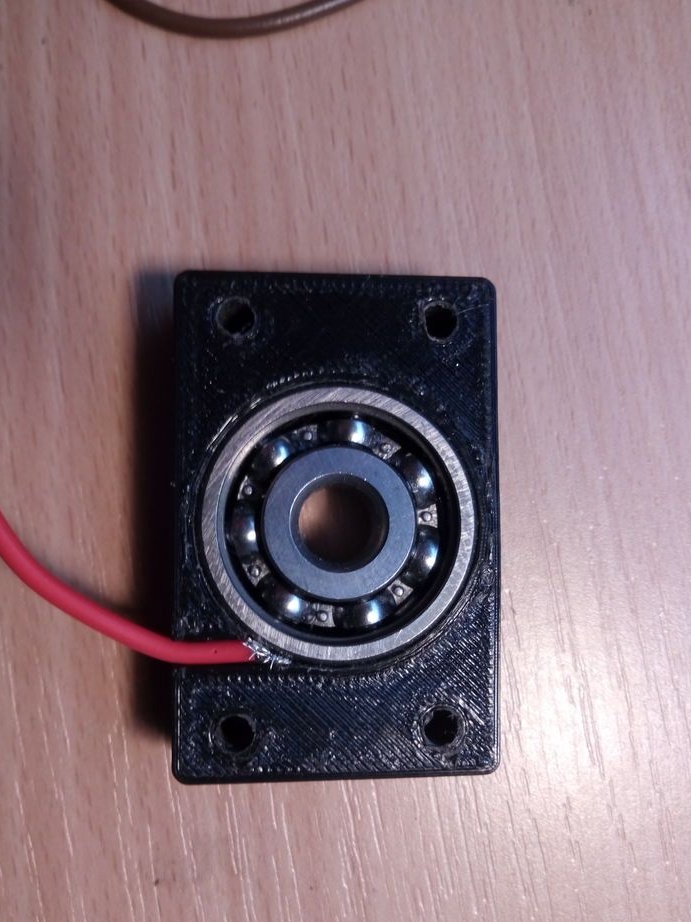
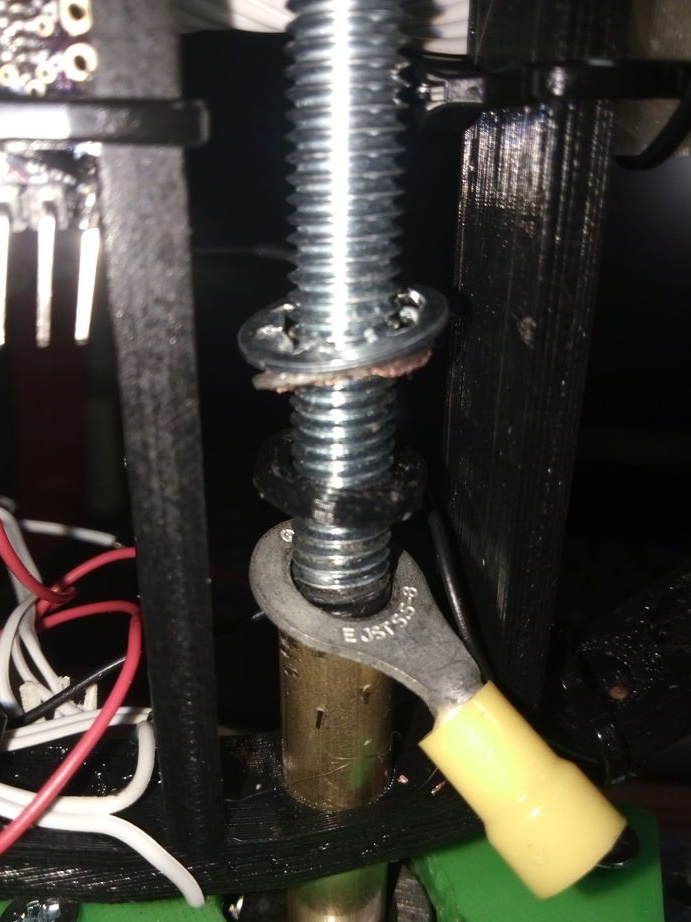
Un perno lungo 250 mm viene utilizzato per l'albero di trasmissione.La lunghezza delle boccole in ottone è di 50 e 30 mm. Dipende dalle dimensioni dell'anello e dalla lunghezza dell'albero. La manica superiore e più lunga deve essere isolata dal perno, poiché viene utilizzata per fornire più potenza ai LED. Per fare questo, avvolgi il nastro elettrico su una forcina o usa un termorestringente, saranno necessarie anche due rondelle di plastica. La manica dovrà essere forata a 8,5-9 mm, altrimenti non si adatterà. L'altra manica insieme all'asta forma un contatto negativo.
La potenza negativa viene inserita in una scanalatura speciale e premuta contro il cuscinetto nella staffa, che può essere stampata su una stampante. Parentesi STL in archivio.


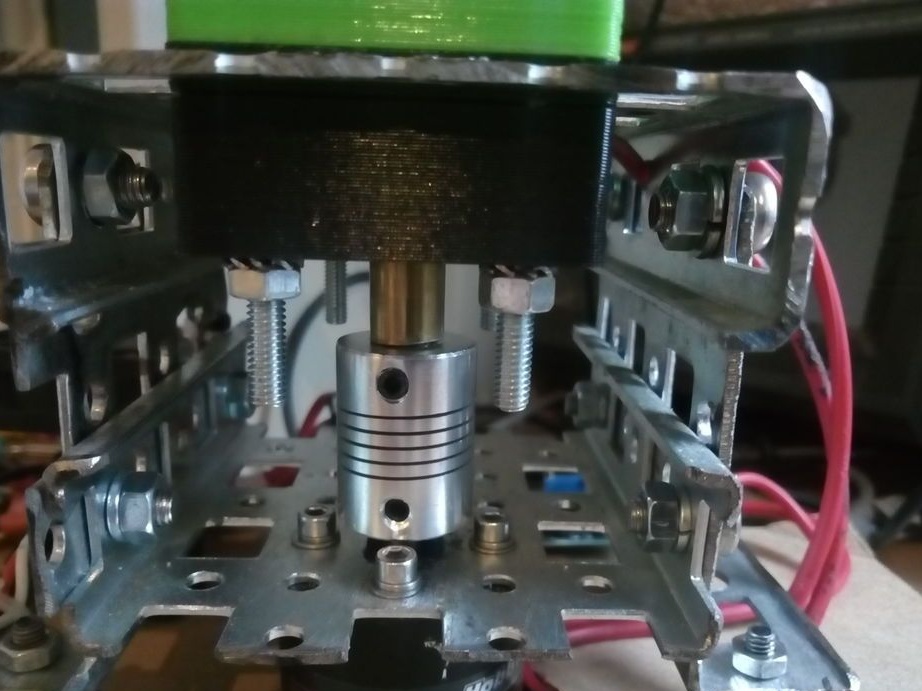
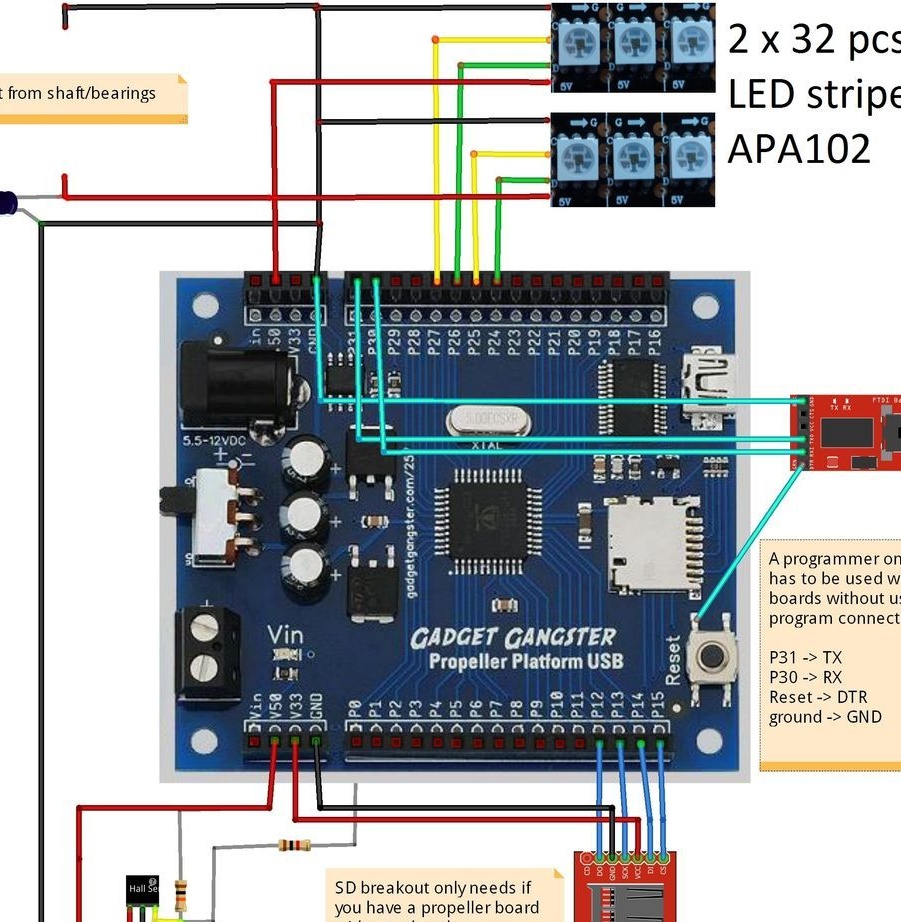
Ora è necessario collegare il motore elettrico, come mostrato nello schema.
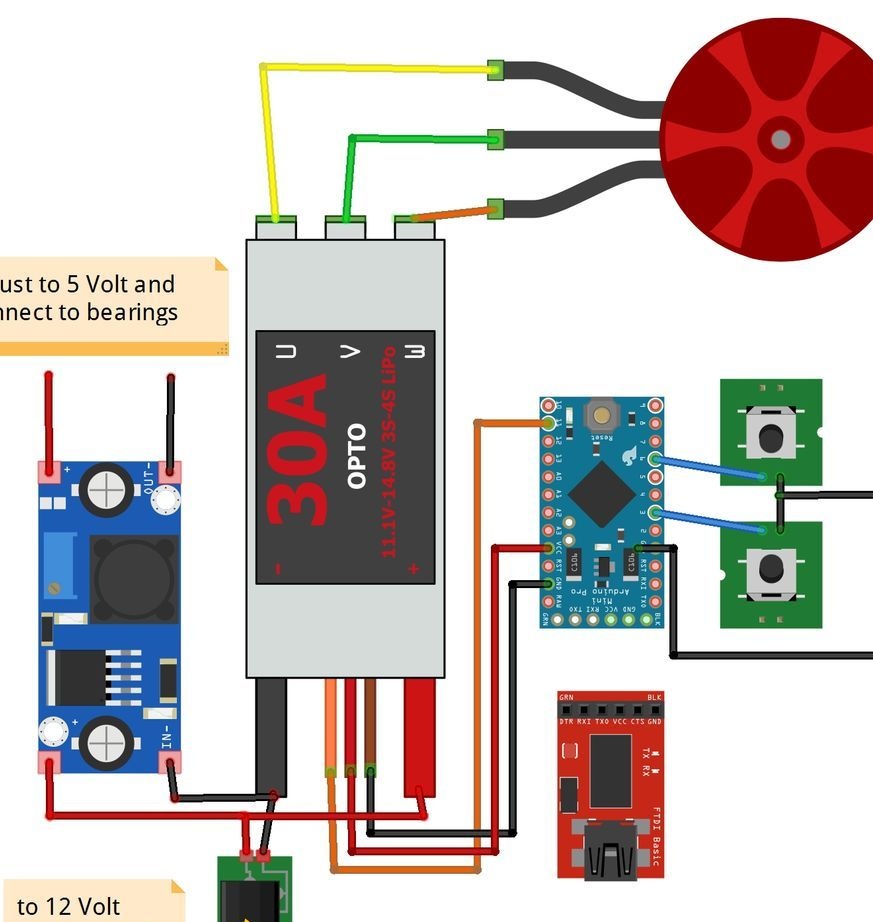
Due pulsanti sul diagramma sono usati per regolare la velocità. All'accensione, l'ESC riceverà un valore di 500 μs. Premere uno dei pulsanti per accendere il motore. Lo schizzo assumerà il valore "StartPos = 625". Successivamente, quando si regola la velocità, questo valore può essere modificato. Premere il pulsante per due secondi e il motore dovrebbe arrestarsi.
Assemblaggio della struttura centrale.
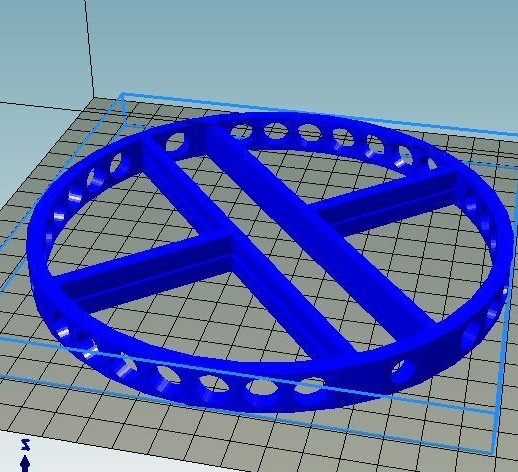

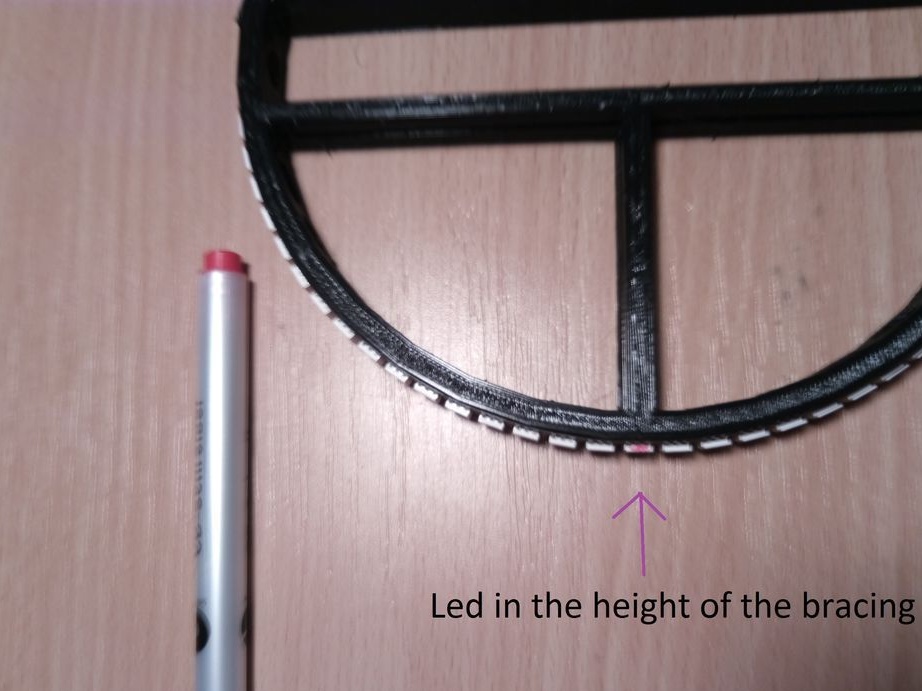
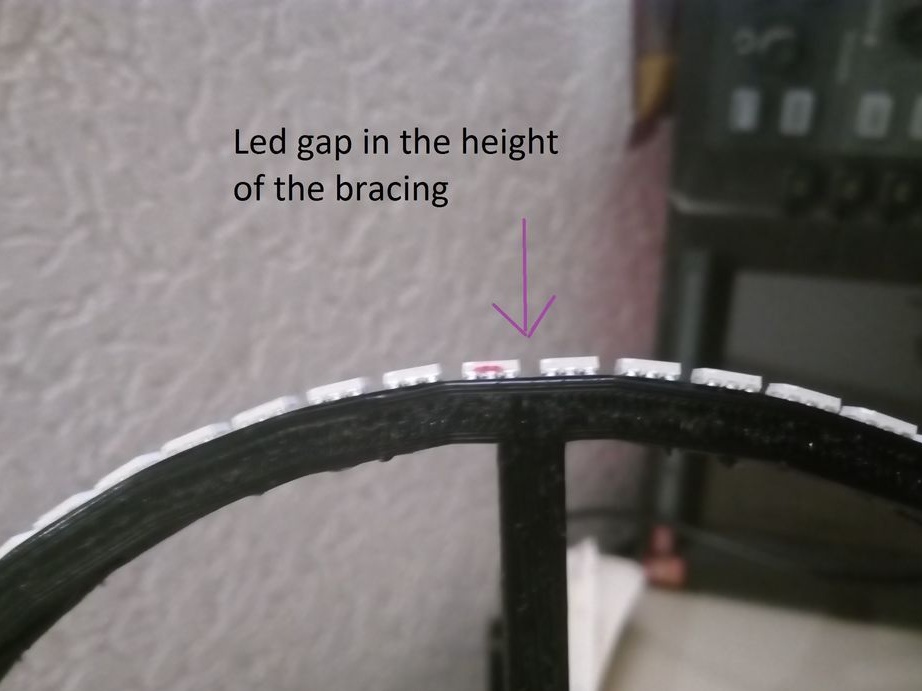


Per fare ciò, stampare l'anello stesso dal file allegato. L'autore ha fatto molti buchi per ridurre il peso. Puoi usare un pezzo di tubo in PVC. Vengono tagliate due strisce da 32 LED. Due strisce di LED formano linee pari e dispari. Disporre i nastri in modo che i LED di una striscia si trovino tra i LED dell'altra, ma dalla parte posteriore. Dopo aver fissato il nastro, è possibile collegare i LED della scheda controller. E quindi è necessario bilanciare l'intero assieme.
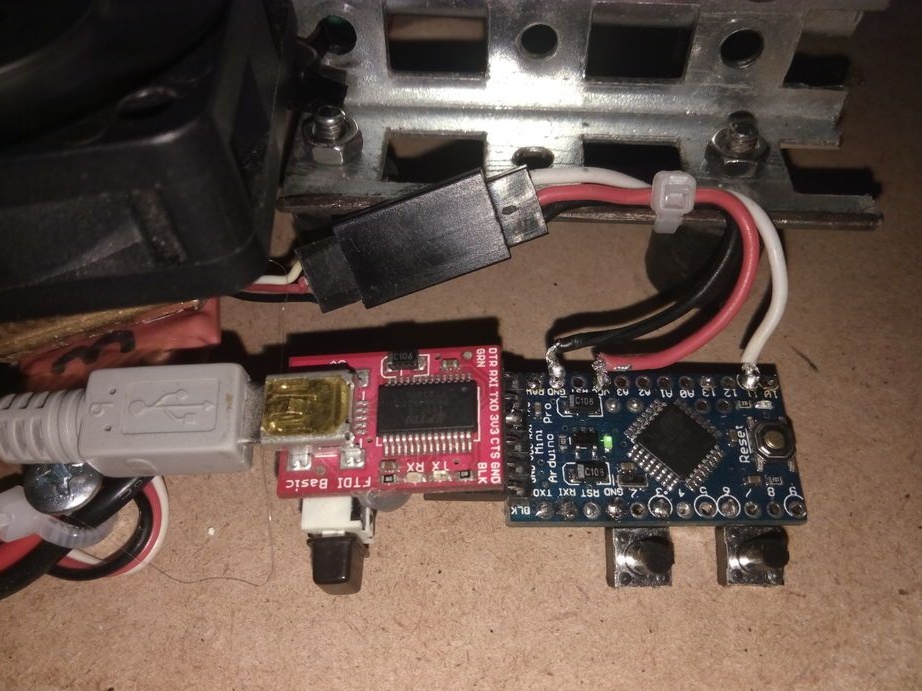
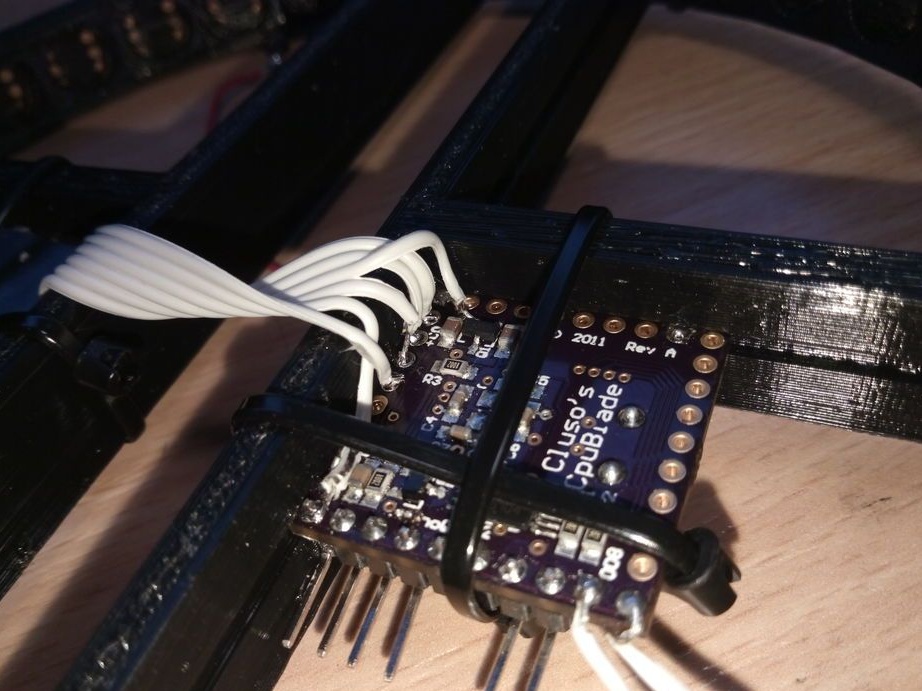
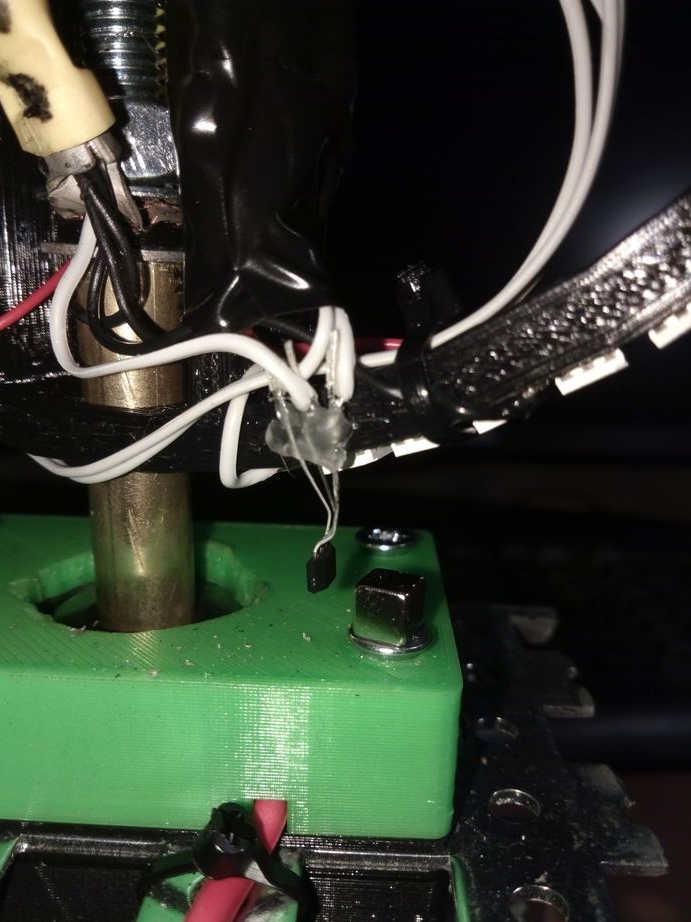
Le seguenti foto mostrano come collegare tutti i componenti del dispositivo insieme. La foto mostra anche il sensore hall installato con un magnete.
Per programmare il microcontrollore dell'elica Parallax è necessario
NON collegare l'apparecchiatura a una porta USB o seriale fino a quando non è stato installato il software. Maggiori dettagli sul caricamento del firmware su Parallax sono disponibili
L'autore utilizza una scheda MCU più vecchia e, di conseguenza, meno economica, in termini di consumo energetico, perché non riesce a trovare nuove librerie sulle nuove schede controller.
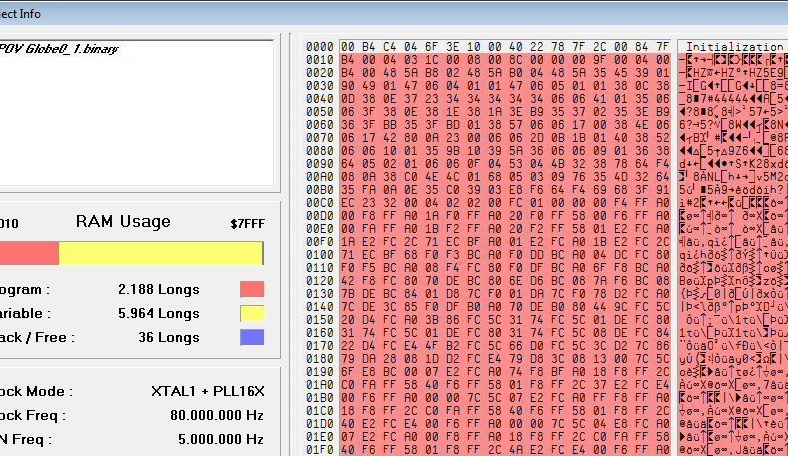
Dopo aver raccolto e collegato tutto, è necessario programmare il controller. L'autore lo fa con l'aiuto. File con firmware nell'archivio.
Ora puoi provare ad avviare il dispositivo. Dall'inizio, copia l'immagine di prova sulla scheda SD e incollala nello slot.
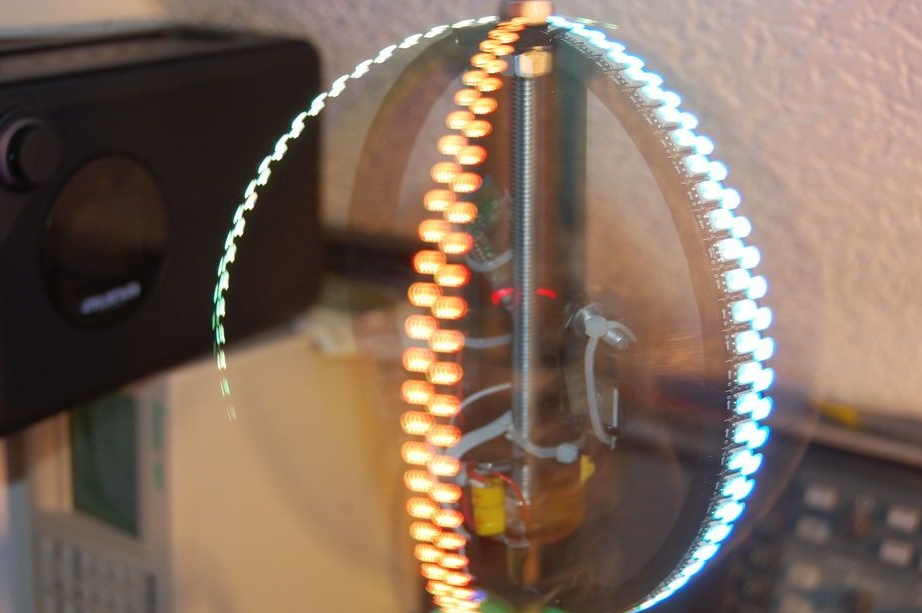
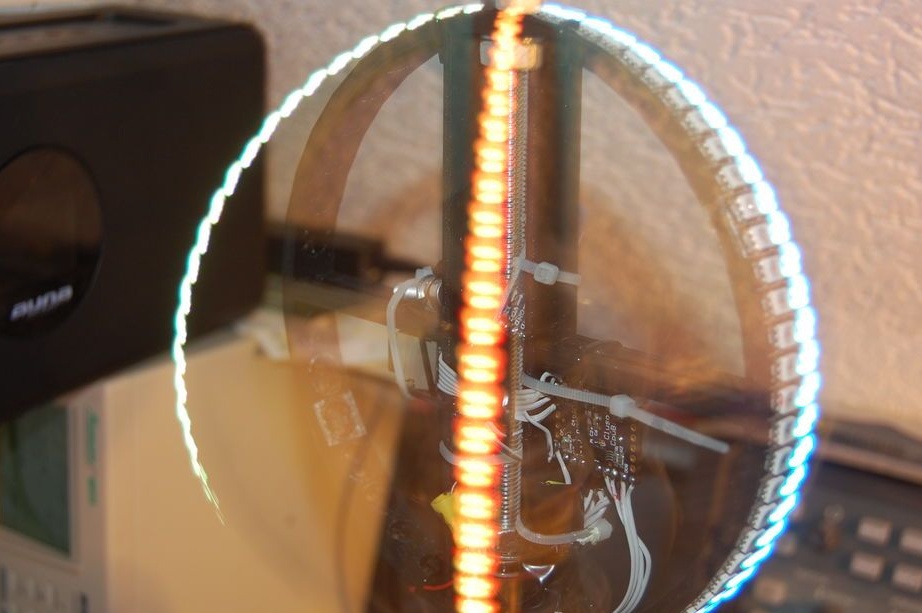
• Se si ruota l'anello a mano, i LED dovrebbero lampeggiare ogni volta che il sensore hall passa attraverso il magnete
• Accendere il motore. Aumentando la velocità con i pulsanti, è necessario assicurarsi che i LED si accendano come mostrato in 2 foto
• Collegare il terminale Arduino al controller del motore.
• Ricordare il valore visualizzato.
• Arrestare il motore
• Scrivi il valore precedentemente memorizzato nella variabile "startpos"schizzo POV_MotorControl
• Programmare nuovamente Arduino.
La prossima volta che il motore si avvia immediatamente alla giusta velocità. Ora puoi "riempire" sulla mappa qualsiasi immagine. Per fare ciò, modifica le dimensioni dell'immagine di 120x64 pixel, ruota l'immagine in senso antiorario di 90 gradi e specchia verticalmente. Riduci la luminosità dell'immagine, poiché i LED sono molto luminosi. Per fare ciò, è meglio usare la correzione gamma con un coefficiente di 0,45.
Salva immagine come BPM a 24 bit senza compressione. Dopo tutte le manipolazioni, il file di output avrà le dimensioni 23094 byte.



