La sua andatura è molto simile a un vero scarafaggio. Quando cammina, ondeggia leggermente avanzando con sicurezza. Lo scarafaggio ha un minimo di parti complesse ed è molto facile da fabbricare.
1.Video test
Il video mostra uno scarafaggio meccanico da diverse angolazioni durante il suo funzionamento e movimento.
2. Caratteristiche e caratteristiche.
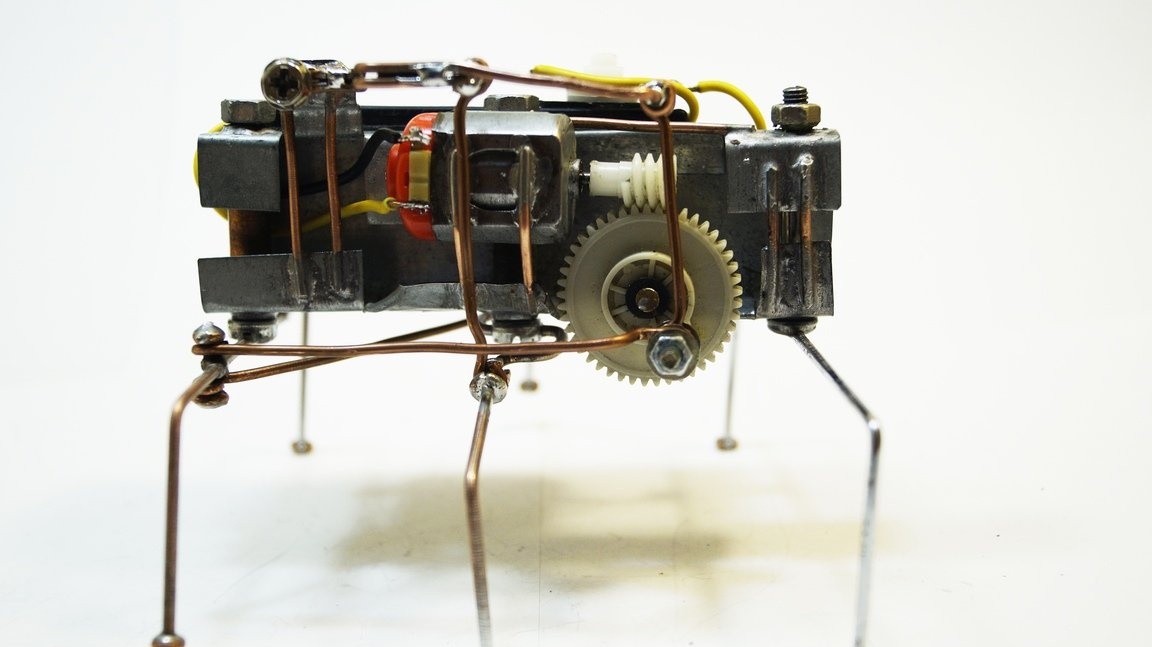
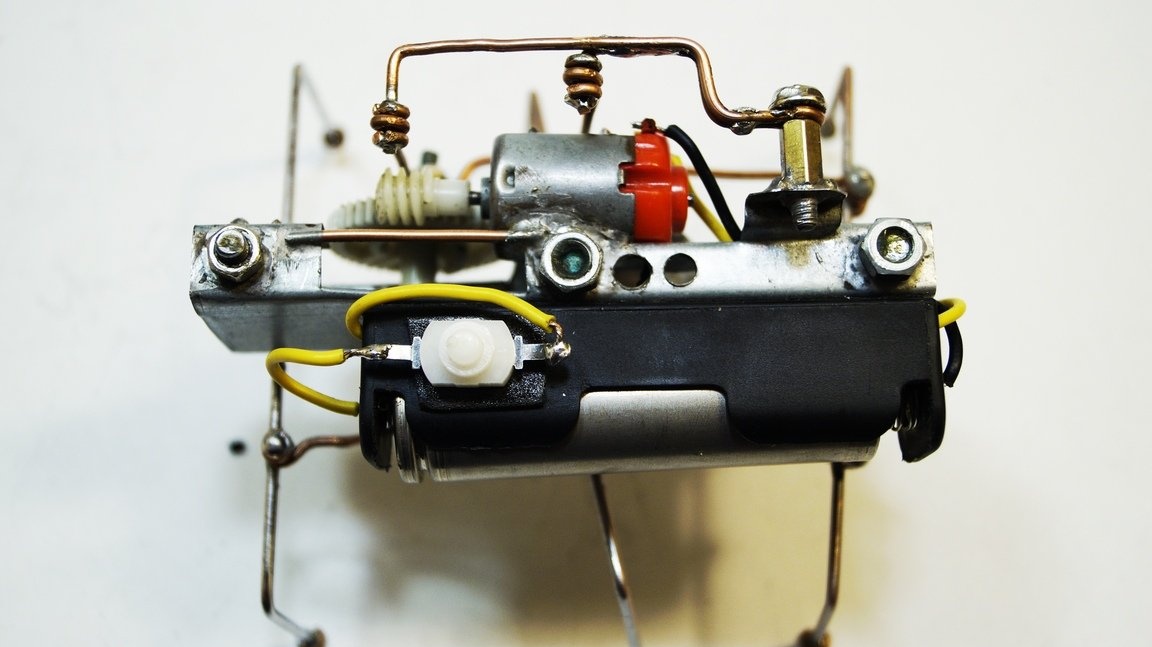
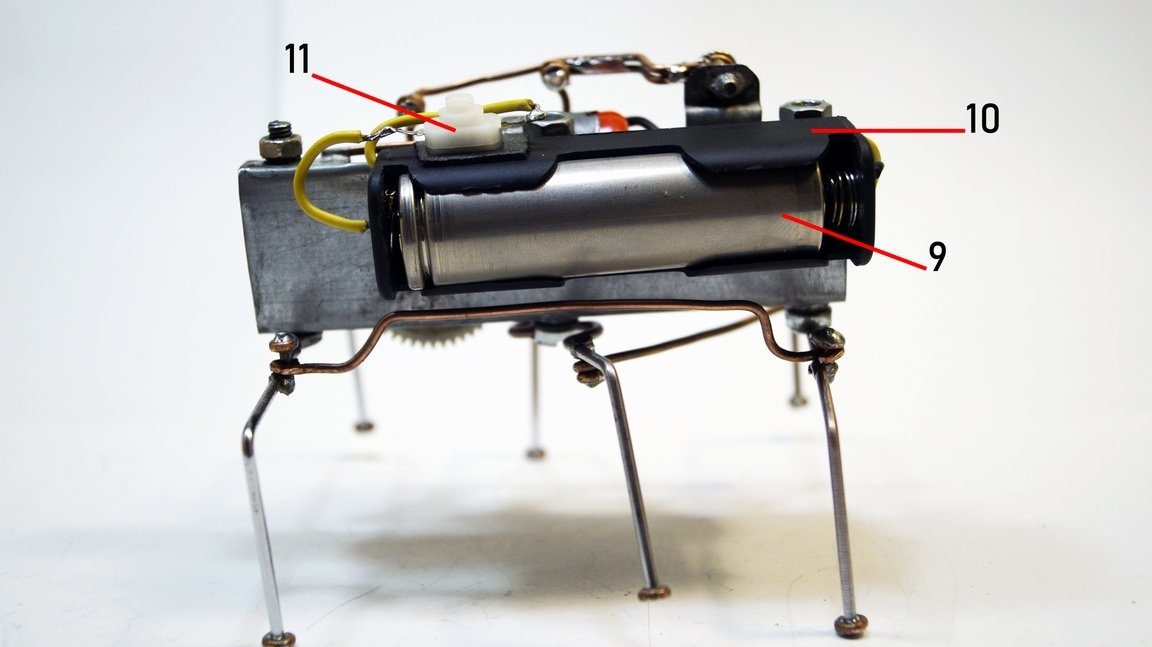
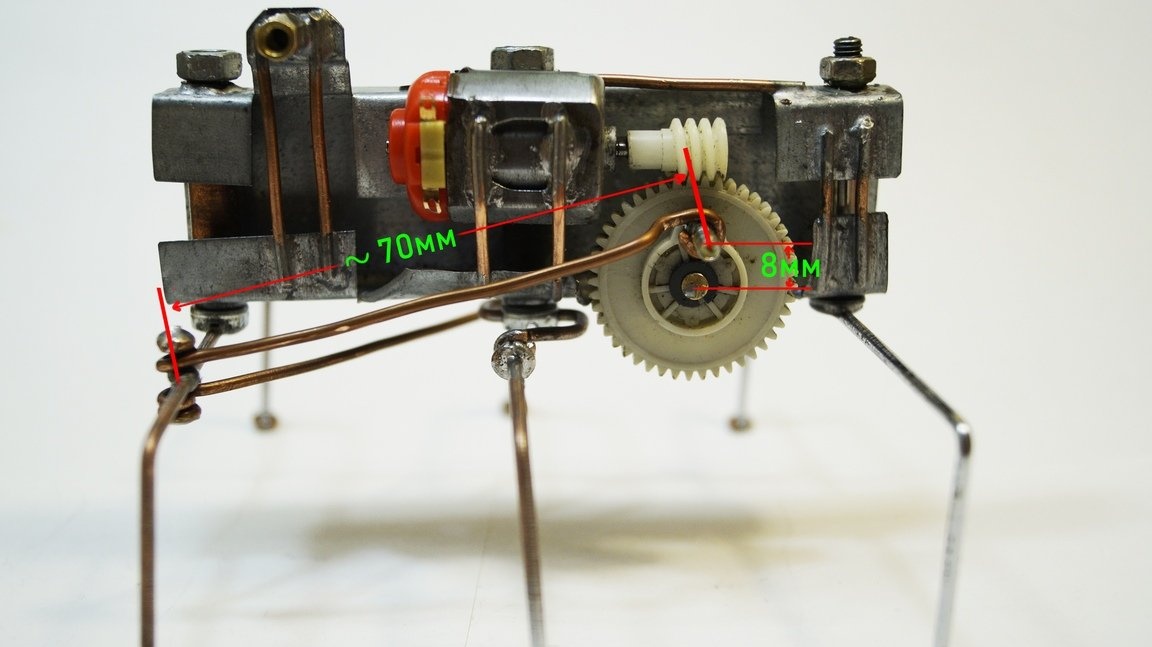
Su una foto 1. Lo scarafaggio meccanico è mostrato, vista laterale. Su una foto 2. Viene mostrata la vista dall'alto.
Foto 1
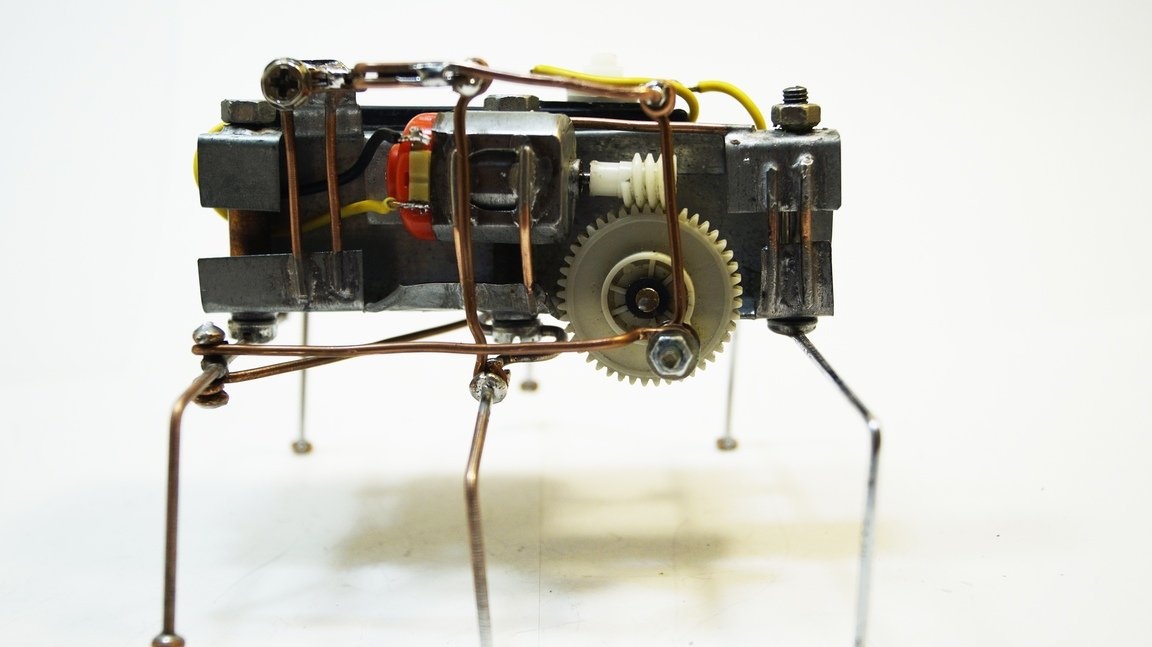
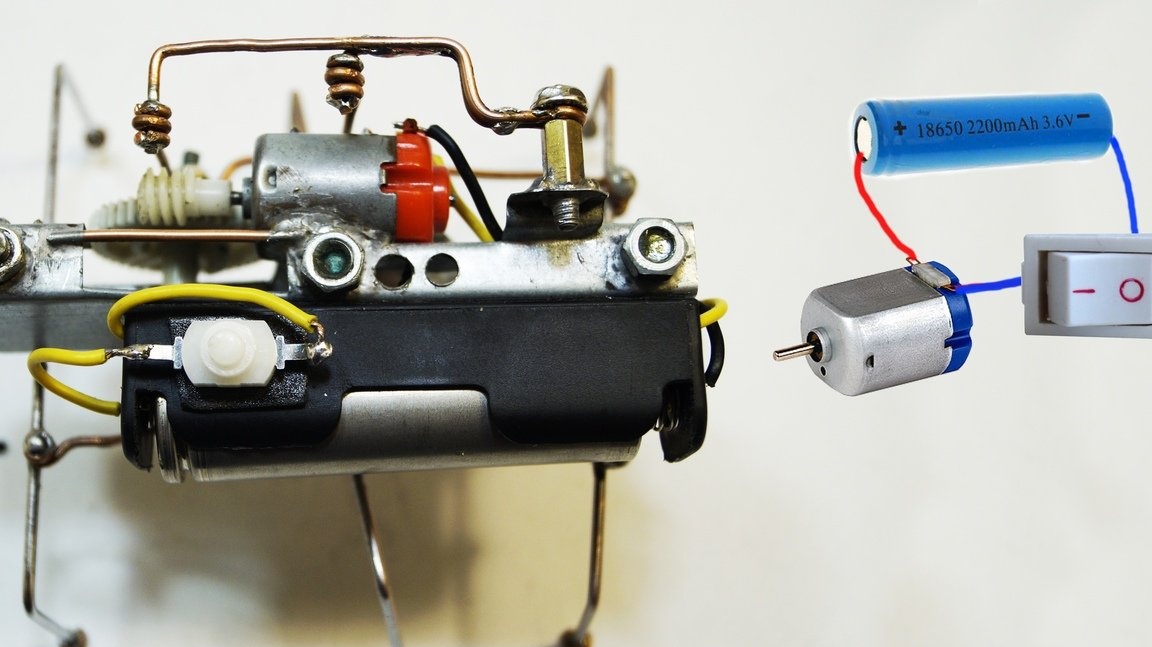
Foto 2
COSTRUZIONE. Come frame, è stato utilizzato il profilo ppn-2 30X20. Il motore e gli altri giunti sono stati montati mediante saldatura. Le zampe di uno scarafaggio sono fissate con bulloni M6. Il pulsante di accensione e il vano batteria sono incollati su nastro biadesivo. Come trazione per guidare le zampe di uno scarafaggio, è stato utilizzato un cavo di rame con una sezione di 2,5 mm.
MOTORE E GRUPPI. Il motore e l'asse della pedivella sono saldati al telaio su POS-61, acido di saldatura ZnCl (cloruro di zinco). Per aumentare la coppia e ridurre le dimensioni, è stato utilizzato un ingranaggio a vite senza fine.
POTENZA. Una batteria 18650 è stata utilizzata come alimentazione del robot.La fonte di alimentazione è 3,7 V.
DETTAGLI SUL DESIGN DEL ROBOT
1. Zampe di uno scarafaggio.
2. Il rinforzo.
3. La cornice.
4. L'asse delle zampe di uno scarafaggio.
5. Meccanismo a manovella.
6. Unità a vite senza fine.
7. Motore elettrico F130 5 V.
8. L'asse del manicotto delle zampe di scarafaggio.
9. Batteria tipo 18650, 3,7 V.
10. Vano batteria.
11. Pulsante di accensione.
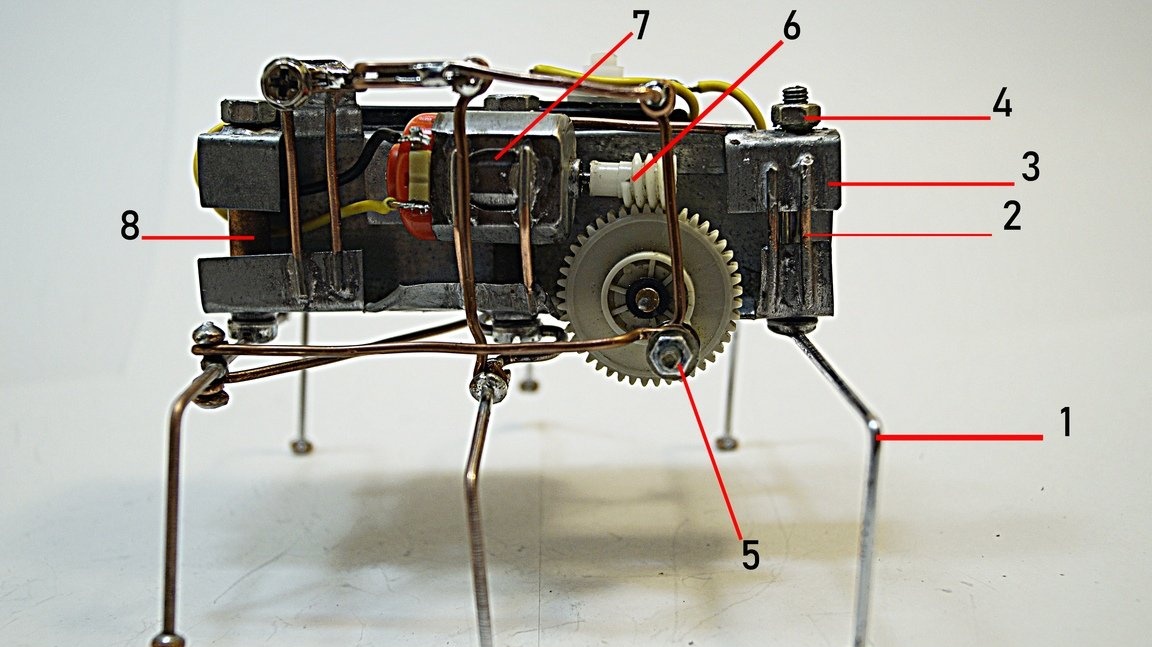
3. Il principio di lavoro.
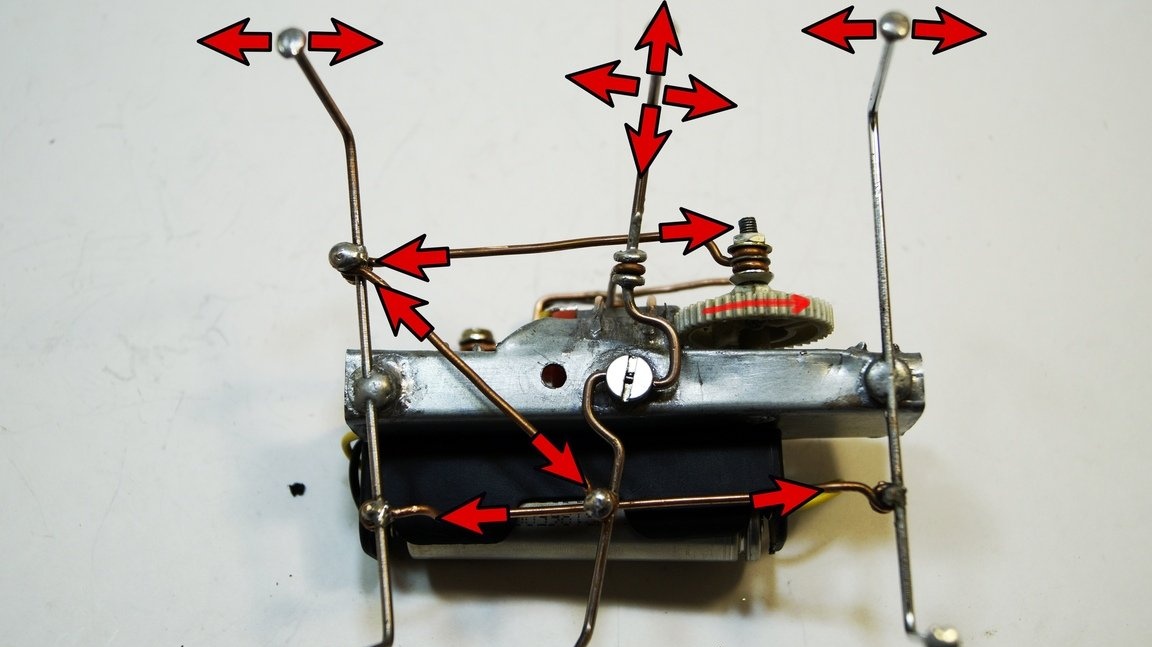
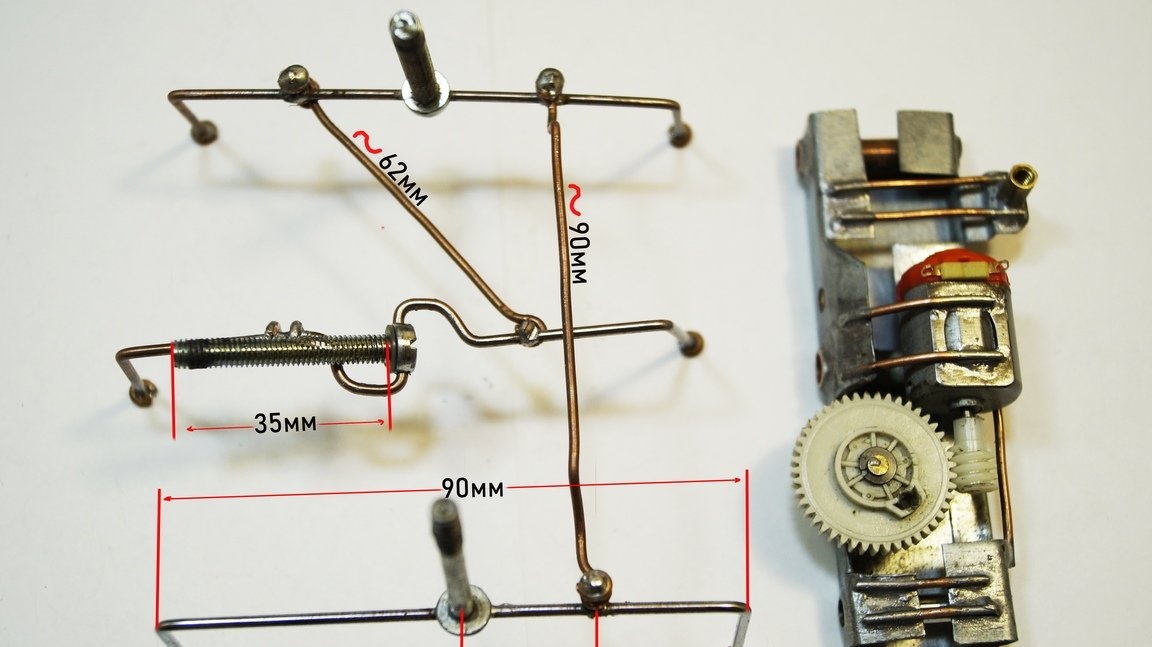
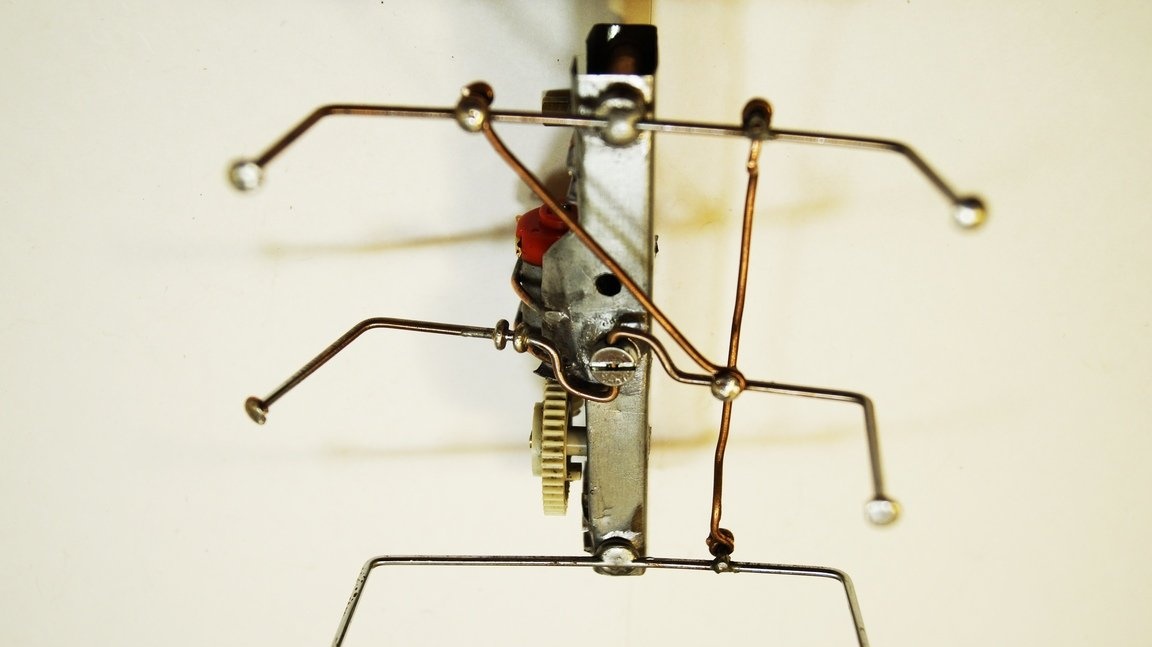
Su una foto 3. 4. Il principio di lavoro di parti meccaniche di uno scarafaggio è mostrato. Vale la pena ricordare che le gambe anteriore e posteriore del robot si muovono in orizzontale e le gambe centrali si muovono in verticale e in orizzontale.
L'alimentazione viene fornita al motore elettrico tramite la chiave, il motore ruota il meccanismo a manovella. La pedivella guida la zampa anteriore attraverso la trazione, rispettivamente, dalla zampa anteriore, la spinta spinge la zampa posteriore (si muovono in modo sincrono). La coppia centrale di zampe è collegata alla prima coppia, trasversalmente (si muovono in antifase).
Per spostare la coppia centrale di zampe in verticale, una leva è montata sopra il motore, che è messo in moto dal meccanismo a manovella.
Foto.3
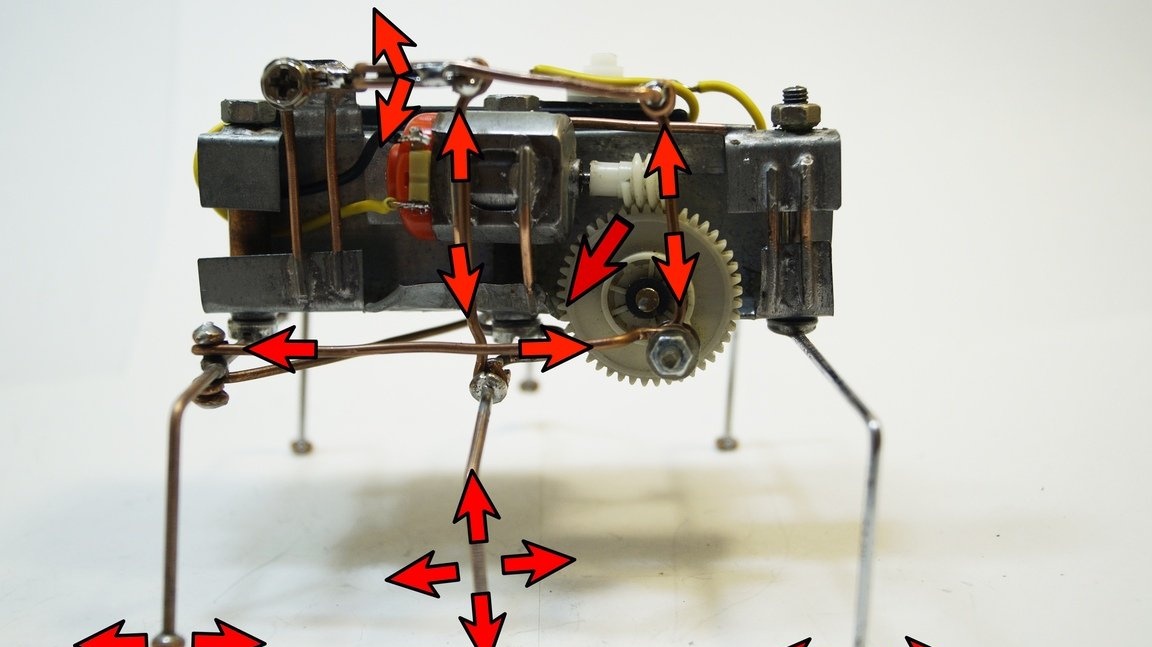
Foto.4
4. Materiali e strumenti.
1. Saldatore 50W.
2. Vano batteria.
3.Prysoy POS-61.
4. Un filo di rame con una sezione di 2,5 mm.
5. Acido di saldatura ZnCl (cloruro di zinco)
6. Motore elettrico F130 5V.
7. Forbici per metallo.
8. Unità a vite senza fine.
9. Pinze.
10. Tubo d'acciaio, diametro 80mm.
11. Batteria ricaricabile 18650.
12.Profilo PPN-2 30X20.
E anche: (pulsante di accensione, nastro biadesivo, filo di montaggio)

5. Istruzioni di montaggio.
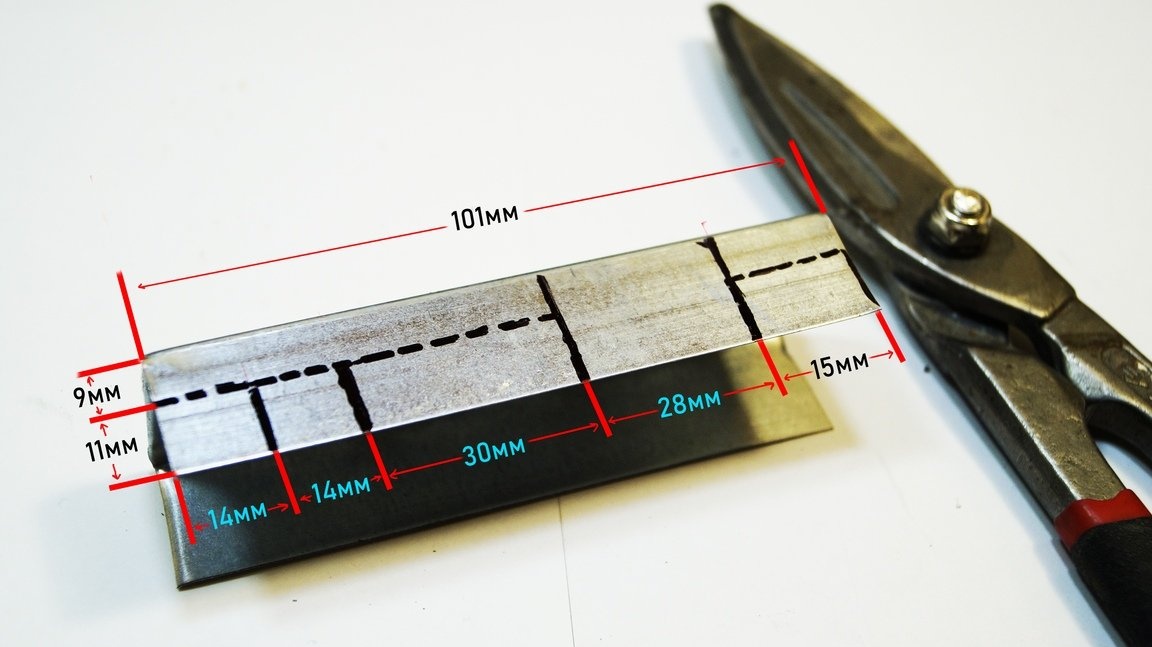
1. Realizzare una cornice di scarafaggi.
Disegna il markup sul profilo come indicato nella foto 5.
Foto 5
Usando le forbici per metallo, tagliamo e pieghiamo il pezzo con una pinza come mostrato nella foto 6. Contrassegna la parte inferiore come indicato nella foto 6. Piega il profilo con una pinza come nella foto 7.
Foto 6.
Foto 7
2. Motore elettrico e asse della pedivella.
Il prossimo passo è saldare il motore elettrico al telaio. Il motore prima della saldatura dovrà essere smontato. Inondiamo l'alloggiamento del motore e il telaio con un saldatore Foto 8.
Saldiamo insieme il corpo del motore elettrico e il telaio, riscaldando bene le parti con un saldatore, premendole l'una con l'altra Foto 9. !!! ATTENZIONE, DETTAGLI CALORE MOLTO RISCALDATO !!!
Foto 9.
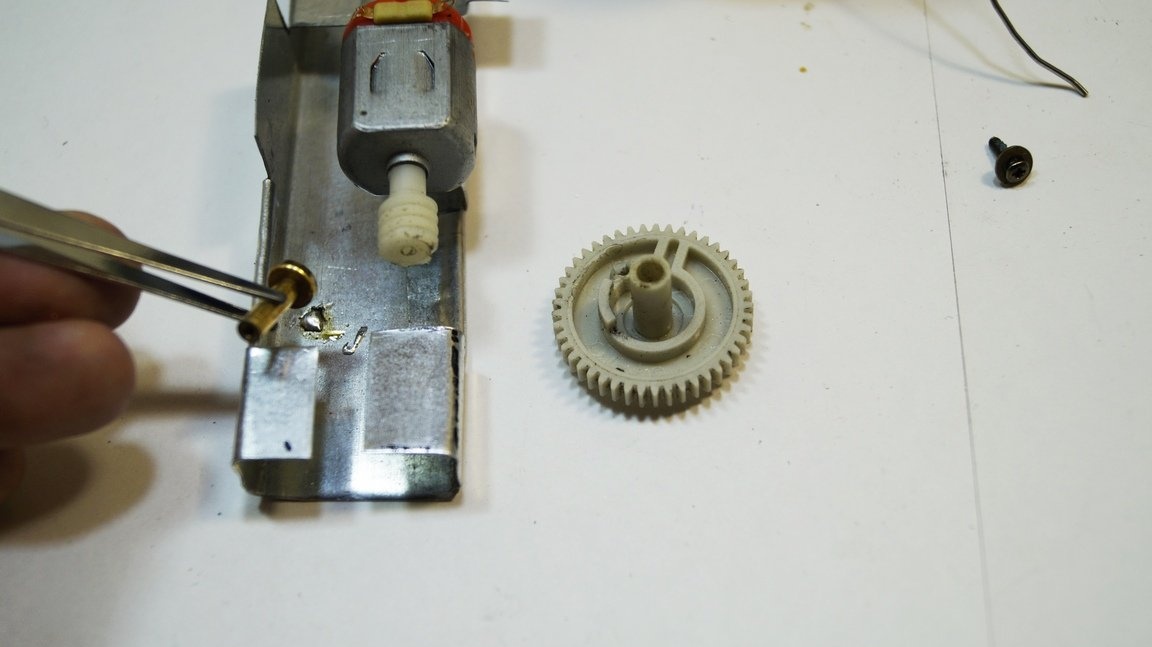
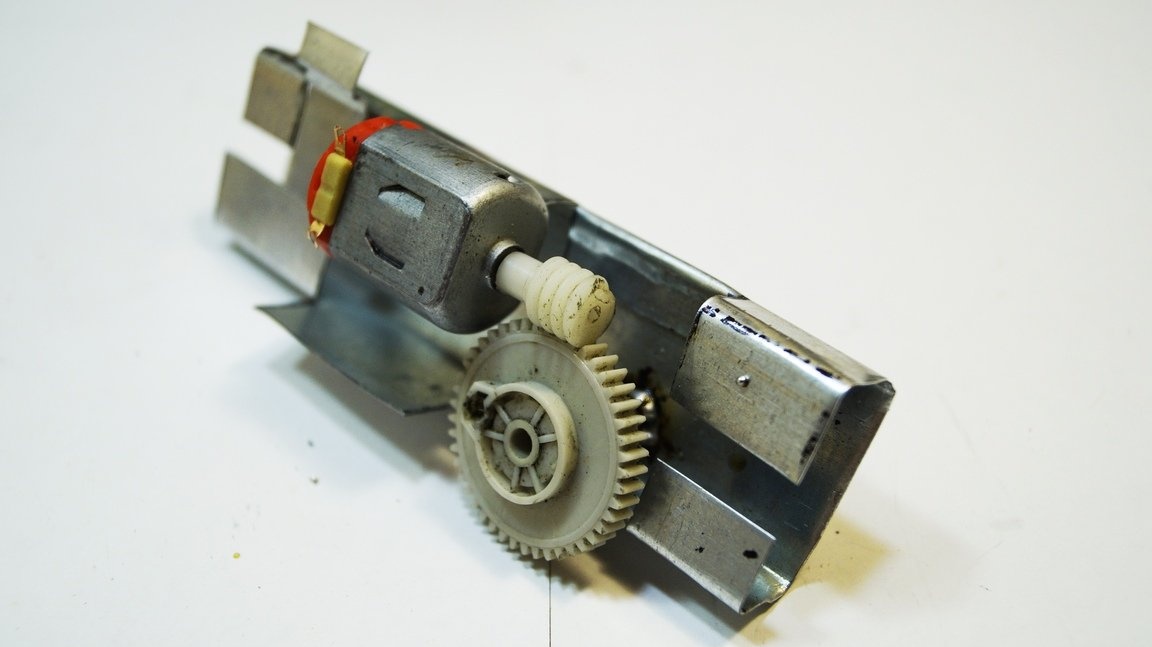
Rimettere il motore elettrico. Saldiamo l'asse di manovella in posizione, questo viene fatto sperimentalmente. Gli ingranaggi a vite senza fine devono essere ben montati insieme, gli ingranaggi non devono essere inclinati Foto 10.11.
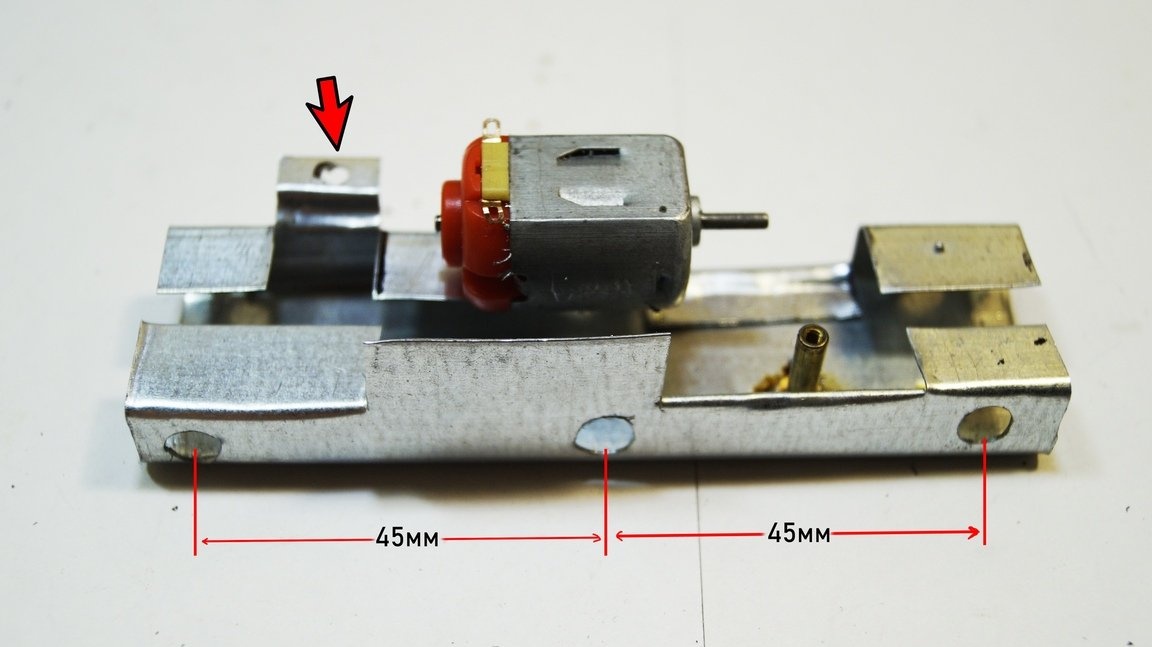
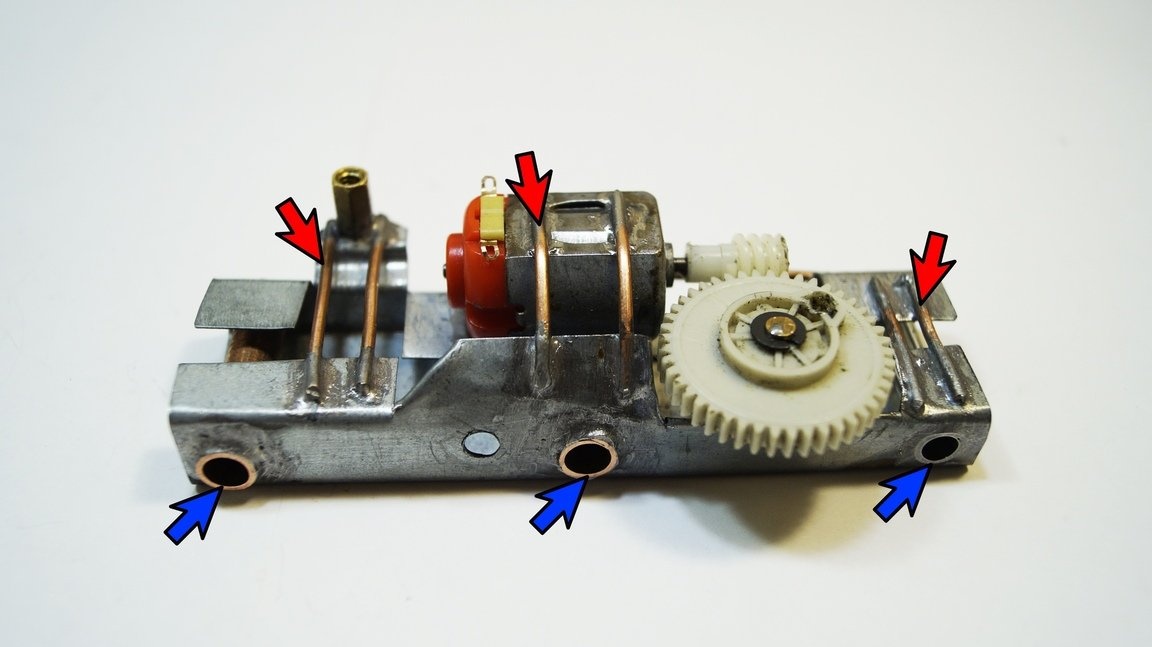
3. Fori per le gambe di uno scarafaggio.
Per fissare le zampe di scarafaggio al telaio, è necessario praticare fori con un trapano da 8 mm. Eseguiamo un foro nell'orecchio dietro il motore elettrico con un trapano da 3,2 mm
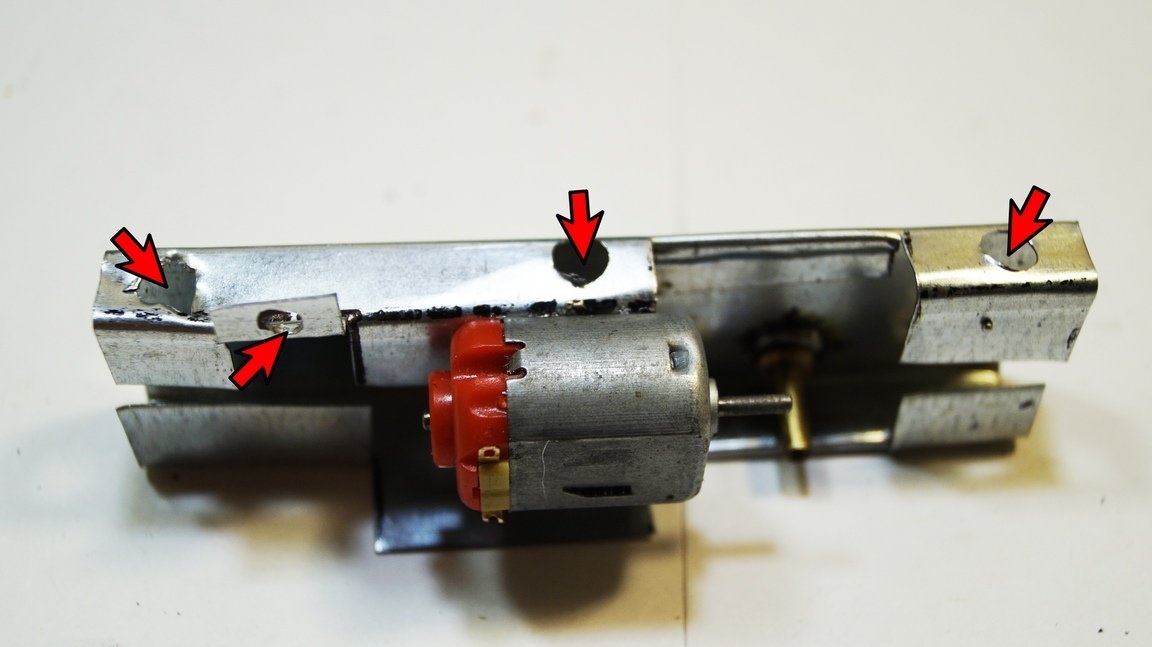
Abbiamo anche saldato un dado nell'orecchio dietro il motore elettrico. La leva responsabile del sollevamento delle zampe centrali lungo l'asse verticale sarà fissata a questo dado
Per rafforzare il design del telaio, gli irrigidimenti sono stati saldati con un filo di rame da 2,5 mm.
Le boccole da 8 mm sono state anche saldate ai punti di attacco delle zampe di scarafaggio Foto 15.
4. Zampe di uno scarafaggio.
Un filo di metallo con un diametro di 3 mm è stato usato come zampe di scarafaggio, è saldato alla testa del bullone M6 Foto 16. La coppia centrale di zampe di scarafaggio è fatta in modo diverso, un foro viene praticato nella testa del bullone lungo il diametro del filo. Il filo è piegato nella forma della lettera "S", ciò consentirà alle gambe dello scarafaggio di muoversi verticalmente. Foto 17.
Foto 16.
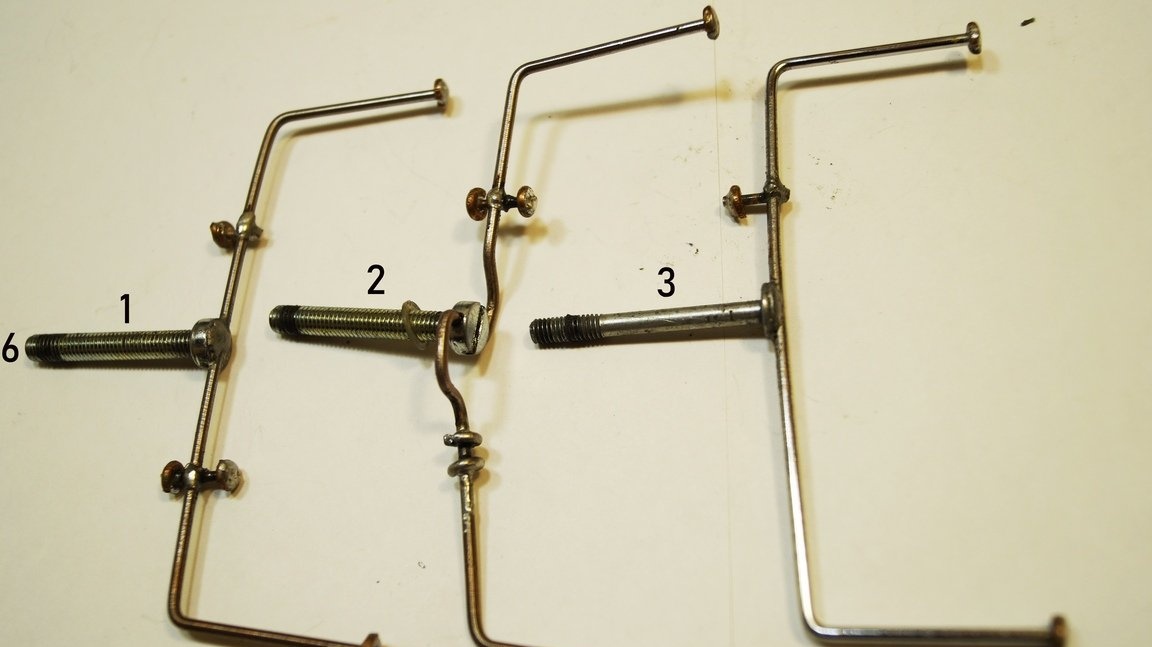
Foto 17.

Per fissare le aste, un filo di rame con una sezione di 2,5 mm di lunghezza di 12 mm di lunghezza è saldato alle zampe dello scarafaggio, gli anelli di rame sono saldati alle sue estremità. Le aste sono realizzate in filo di rame con una sezione trasversale di 2,5 mm, le dimensioni sono approssimative, si consiglia di piegare il filo in modo che in futuro vi sia la possibilità di regolazione lungo la lunghezza della Foto 18.
La foto 19 mostra una vista dal basso, con le zampe montate sul telaio.
Stabiliamo la trazione dal meccanismo a manovella alle zampe anteriori dello scarafaggio. Facciamo una spinta con un orlo per la possibilità di regolarlo. Manovella raggio 8mm foto 20.
Facciamo una leva per spostare le zampe centrali verticalmente dal filo di rame Foto 21.22.
Questo completa la parte meccanica dello scarafaggio.
Foto 21.

Foto 22. Viene mostrata la posizione delle zampe nella posizione inferiore dell'albero motore.
Foto 22.

5. La parte elettrica.
Incollare il vano batteria su un nastro biadesivo sul telaio dello scarafaggio. Incollare il pulsante di accensione sul vano batteria. Abbiamo saldato tutti gli elementi della Foto 23.
Il robot - lo scarafaggio è pronto !!!