


Nella cerchia dei modellatori di razzi per questo nodo, è consuetudine usare il termine avionica - avionica. Onestamente non capisco davvero perché. Nella stragrande maggioranza dei casi, il nodo è responsabile solo per l'attivazione del sistema di salvataggio, se è più fresco, la registrazione dei dati di volo e la registrazione video. Ma il concetto di avionica ha una definizione chiara: "L'Aeronautica ha storicamente sviluppato una chiara divisione delle apparecchiature aeronautiche (aeromobili) in avionica (AEC), per il suo lavoro emette e / o riceve onde radio) e apparecchiature aeronautiche (AO). La maggior parte dei sistemi AO contiene anche elettronico componenti e componenti, ma non usano le onde radio durante il loro funzionamento. "
Sulla base di queste definizioni, sarebbe molto più logico usare il termine equipaggiamento per aviazione, o semplicemente avionica. Ma l'avionica è così avionica.
Sulla base di queste definizioni, sarebbe molto più logico usare il termine equipaggiamento per aviazione, o semplicemente avionica. Ma l'avionica è così avionica.
Esistono molte varianti e soluzioni per questo compito: timer, in cui il paracadute viene espulso dopo un certo tempo, calcolato prima del volo, sensori di inclinazione ottica (LED). Ma a causa del fatto che viviamo in una società e in un tempo in cui sono disponibili tecnologie digitali sofisticate, sono stati ampiamente utilizzati circuiti intelligenti in grado di misurare l'altezza. Tali schemi sono costruiti sulla base di altimetri (altimetri), è anche un sensore di pressione barometrica. Come penso, tutti sanno che la pressione atmosferica è diversa a seconda dell'altitudine. Questo è il motivo per cui le montagne hanno un punto di ebollizione più basso dell'acqua e i membri della spedizione possono sperimentare la fame di ossigeno. In normali condizioni di vita, una persona non è in grado di rilevare la differenza di pressione atmosferica, questi dispositivi sono anche in grado di registrare i cambiamenti letteralmente di 10 centimetri!
È uno di questi dispositivi che voglio descrivere oggi. Senza un pizzico di coscienza, confesso che lo schema non è mio. L'autore del dispositivo è il modellatore di razzi francese Boris Duro (spero sia stato tradotto correttamente in russo).
Questo è il dispositivo "più giovane" proposto da Boris, tuttavia ha funzionalità sufficienti per un avvio di successo. Innanzitutto, andiamo oltre il suo lavoro. Dopo l'accensione, il dispositivo viene attaccato al terreno, controlla l'integrità del fusibile ed emette un segnale: intermittente corto - in ordine, intermittente lungo - danneggiato. Il segnale suonerà prima del decollo, indipendentemente dalla manutenzione / malfunzionamento del fusibile dopo il decollo, il circuito inizierà a misurare l'altitudine.Il decollo è considerato un'altitudine di oltre 20 metri, al raggiungimento dell'apogeo, il dispositivo attiva il fusibile e, usando un semplice codice, ruota continuamente l'altezza dell'apogeo in un cerchio. Sembra così: un segnale lungo - 100 metri, un corto 10 metri. Cioè, supponiamo che il dispositivo emetta 5 segnali lunghi e 3 brevi, il che significa che l'altezza dell'apogeo è di 530 metri. Questo "messaggio" gira fino allo spegnimento del dispositivo. I dati non vengono memorizzati e, dopo l'accensione, l'intero ciclo ricomincia. Sì, questo dispositivo non registra i dati di volo, come molti dei suoi analoghi, ma per i primi voli è un'opzione più che adatta. Inoltre, il circuito realizzato su componenti planari è così piccolo che è facile da adattare anche al razzo dei bambini più piccoli.
Questo è il dispositivo "più giovane" proposto da Boris, tuttavia ha funzionalità sufficienti per un avvio di successo. Innanzitutto, andiamo oltre il suo lavoro. Dopo l'accensione, il dispositivo viene attaccato al terreno, controlla l'integrità del fusibile ed emette un segnale: intermittente corto - in ordine, intermittente lungo - danneggiato. Il segnale suonerà prima del decollo, indipendentemente dalla manutenzione / malfunzionamento del fusibile dopo il decollo, il circuito inizierà a misurare l'altitudine.Il decollo è considerato un'altitudine di oltre 20 metri, al raggiungimento dell'apogeo, il dispositivo attiva il fusibile e, usando un semplice codice, ruota continuamente l'altezza dell'apogeo in un cerchio. Sembra così: un segnale lungo - 100 metri, un corto 10 metri. Cioè, supponiamo che il dispositivo emetta 5 segnali lunghi e 3 brevi, il che significa che l'altezza dell'apogeo è di 530 metri. Questo "messaggio" gira fino allo spegnimento del dispositivo. I dati non vengono memorizzati e, dopo l'accensione, l'intero ciclo ricomincia. Sì, questo dispositivo non registra i dati di volo, come molti dei suoi analoghi, ma per i primi voli è un'opzione più che adatta. Inoltre, il circuito realizzato su componenti planari è così piccolo che è facile da adattare anche al razzo dei bambini più piccoli.
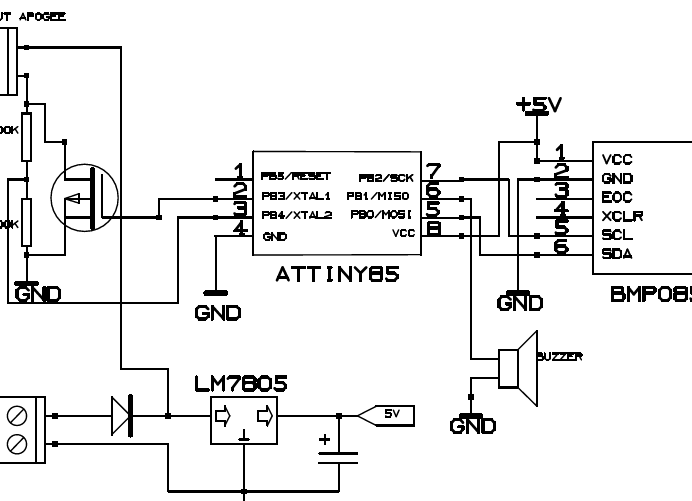
Sopra puoi osservare lo schema circuitale del dispositivo. Lo schema è stato preso dal sito di Boris, ma vale la pena notare che ha un cant che può essere fuorviante. Il diagramma mostra una designazione grafica di un transistor ad effetto di campo del canale p, quando in realtà viene utilizzato un canale n. Quale transistor non è essenziale da usare, qualsiasi canale n ad alta corrente.
Per la produzione avrai bisogno di:
- Modulo barometro BMP180
- Microcontrollore Attiny 85
- Condensatore elettrolitico 47 mF, 16 V
- Resistori da 100 kΩ e 2 kΩ
- Stabilizzatore 78L05 in custodia TO92 o equivalente in SMD
- Transistor ad effetto di campo ad alta corrente IRF540 / IRFZ44 o equivalente nella versione SMD
- Pastiglie per fili 2 pezzi
- Buzzer attivo a 5 V.
- Diodo 1N4001 o 1N4007. Facoltativamente, è una protezione contro i sorpassi.
- textolite
Dallo strumento:
- Saldatore
- pinzetta
- Frese laterali
- saldare
- flusso
- Programmatore USBasp
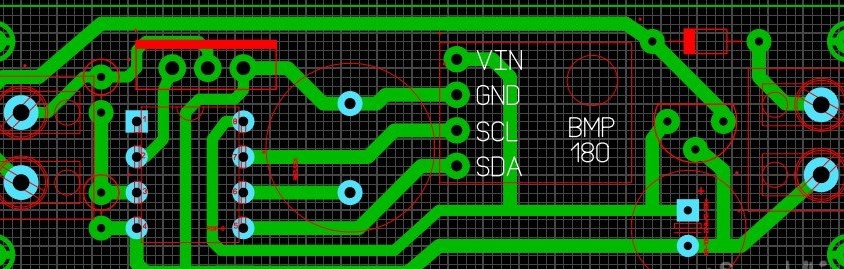
Nell'archivio di seguito sono riportati due file del circuito stampato, per i componenti SMD e per il cablaggio di uscita convenzionale. Devo dire subito che non ho raccolto la seconda scheda, l'ho fatta in SMD, ma per coloro che per qualche ragione non riescono a saldare piccoli componenti planari, ho tracciato una traccia per componenti ordinari. Tuttavia, ho controllato più volte, dovrebbe essere privo di errori.
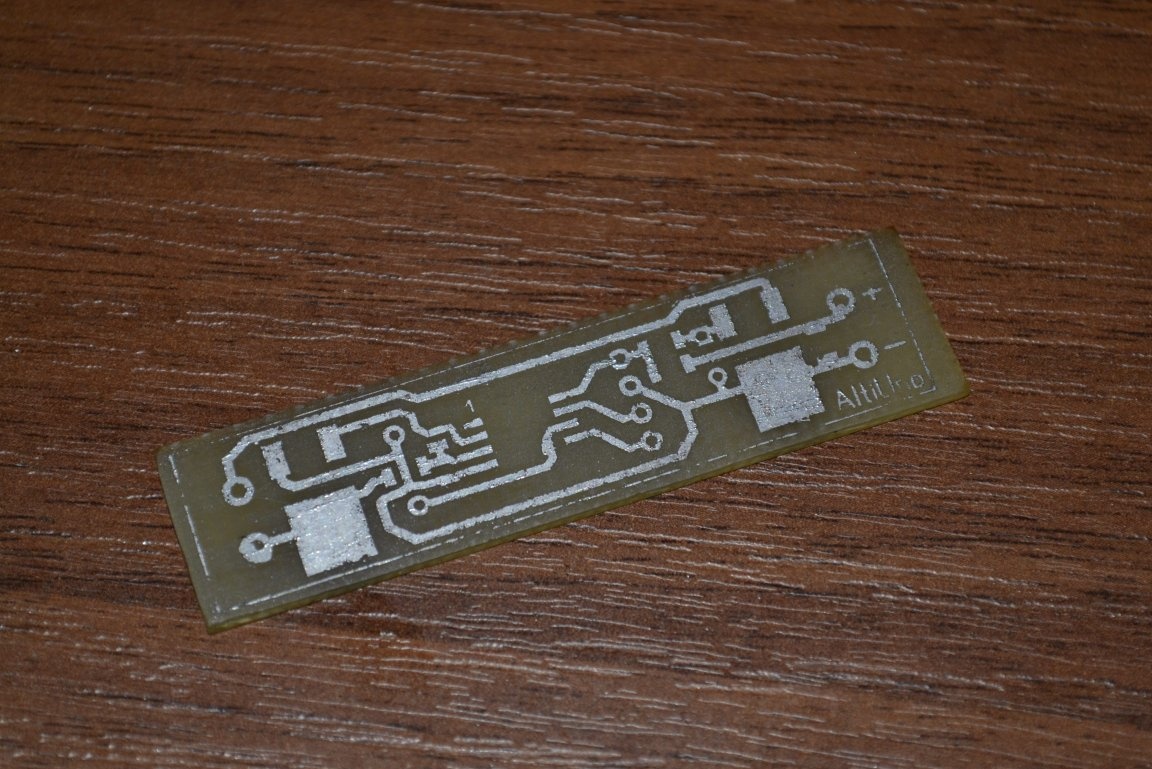
E quindi, prima di tutto realizziamo un circuito stampato. Come sempre, LUT.
E saldare tutti i componenti SMD tranne il controller.
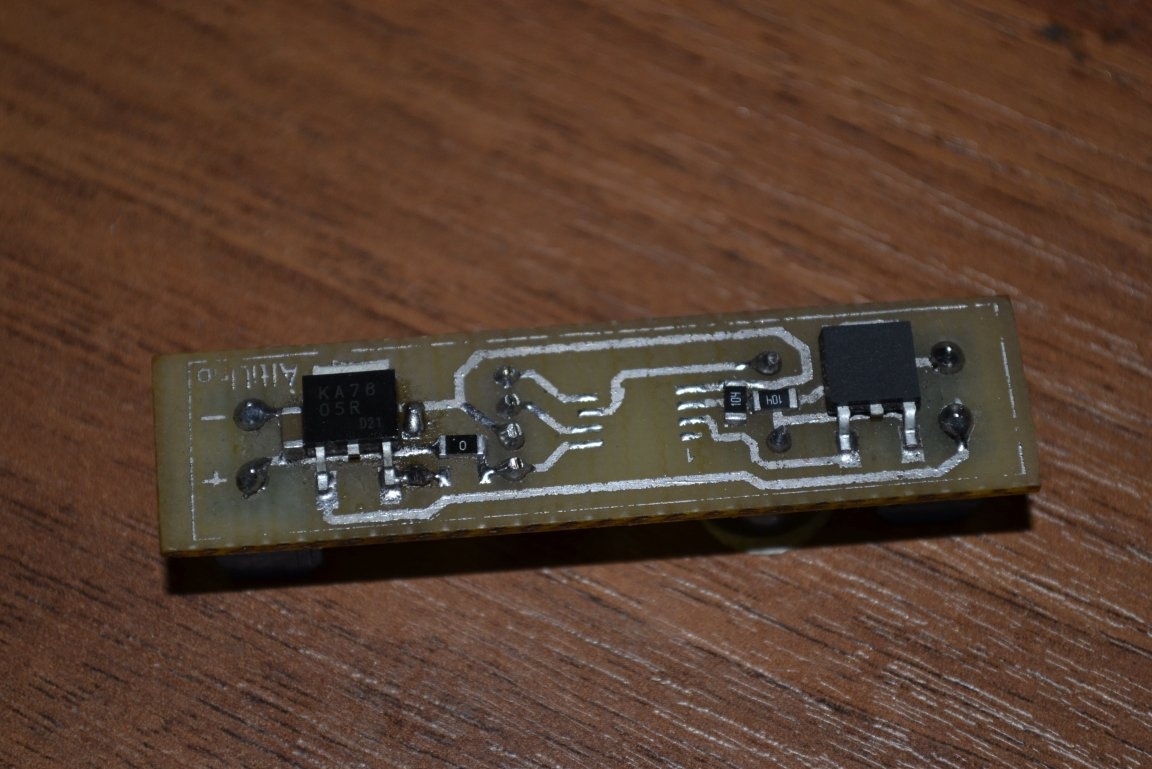
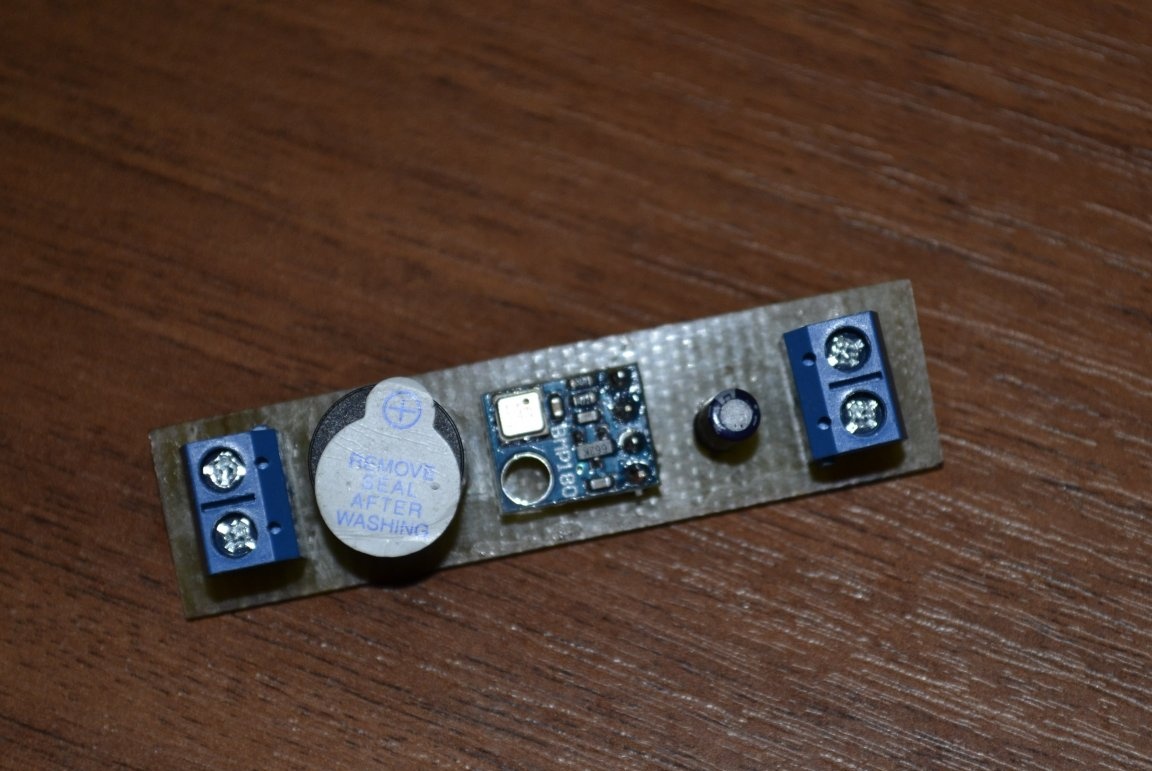
Quindi, saldare il buzzer, il sensore, i pad e il condensatore.
Ora è necessario eseguire il flashing del controller. Il firmware per questo circuito è scritto in un ambiente arduino, quindi è necessario compilare il bootloader Arduino nel controller. Questo viene fatto tramite il programmatore ASP USB direttamente dall'ambiente di programmazione arduino stesso. Prima di tutto, devi collegare il controller al programmatore stesso. Lo schema di collegamento è sotto.

Per collegare il controller nella versione SMD, è necessario un adattatore.

Il file con il circuito stampato è anche nell'archivio alla fine dell'articolo. Passiamo ora ai miglioramenti del software. Per prima cosa devi fare amicizia Arduino IDE con Attiny 85, perché questo controller non è supportato. Per fare questo, su ... / Arduino / hardware devi creare una minuscola cartella in cui posizionare i contenuti dell'archivio con i kernel. Puoi scaricare l'archivio questo linkScarica l'ultima versione. Ora l'ambiente sarà in grado di vedere il controller. Colleghiamo il programmatore, apriamo l'ambiente arduino, andiamo a e mettiamo USBasp.
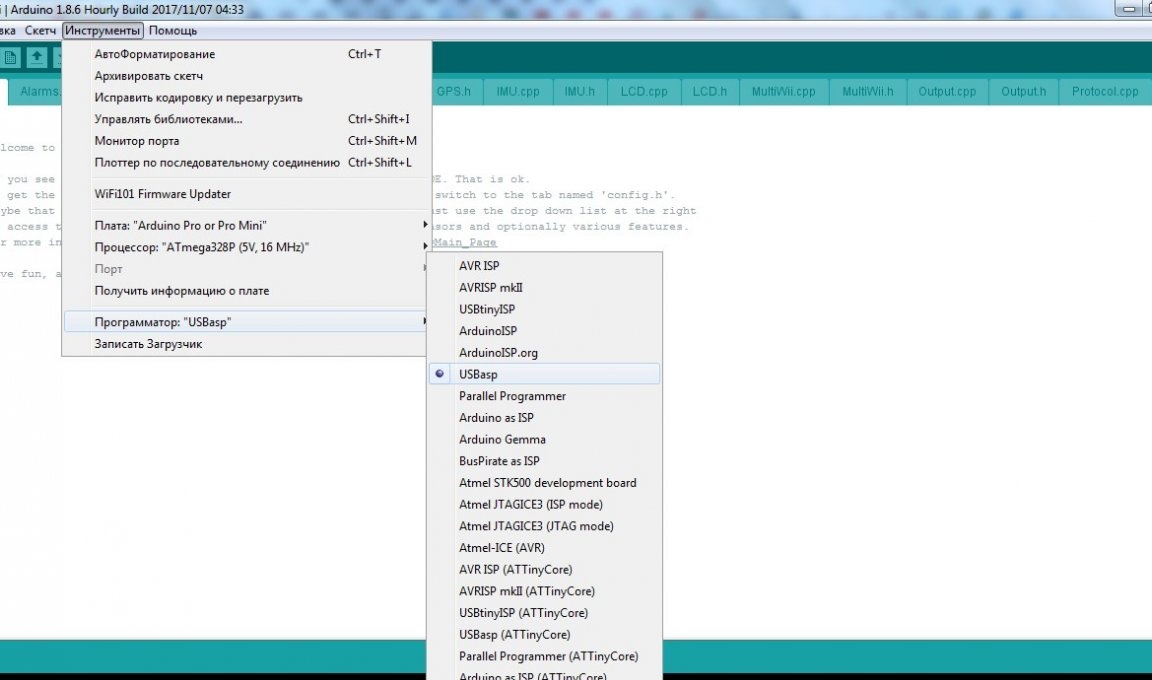
Ora seleziona ATtiny25 / 45/85.
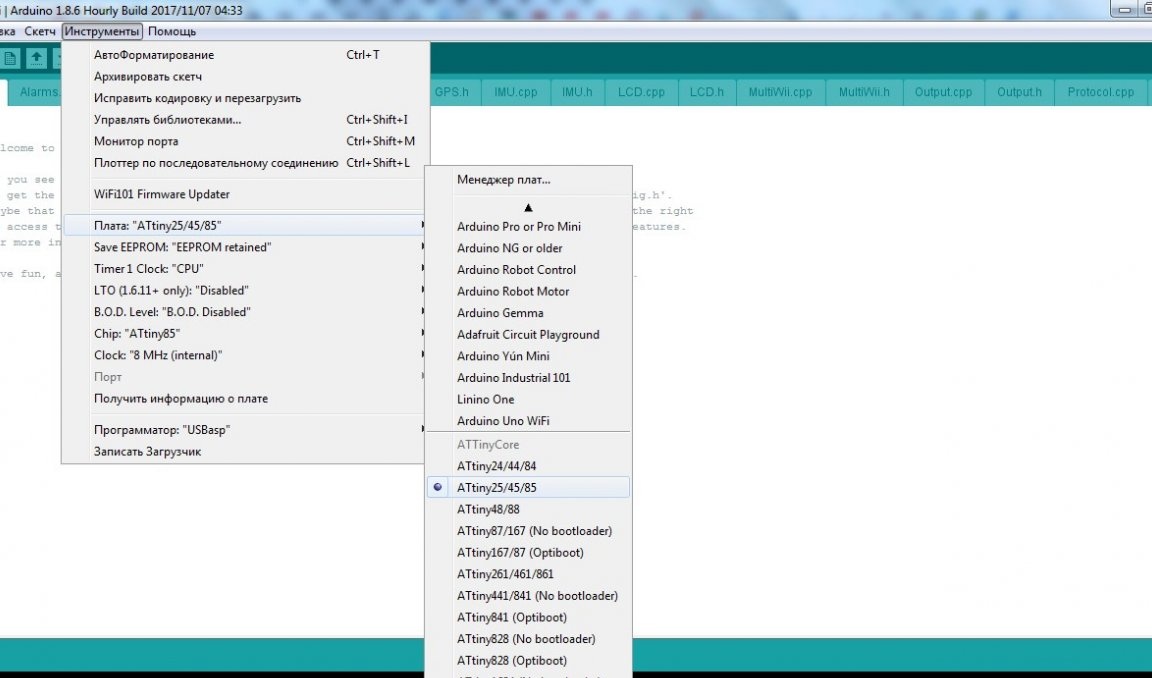
Guardiamo che ATtiny85 starebbe in Chip. Ora tutti negli stessi strumenti fanno clic. Se tutto viene eseguito correttamente, non ci sono problemi con il contatto, non ci sono problemi con i driver, quindi l'ambiente segnalerà una registrazione riuscita. Un grande vantaggio in questo firmware è che non devi preoccuparti dei fusibili, l'ambiente Arduino farà tutto da solo. Quindi non ucciderai il controller. Successivamente, è possibile compilare lo schizzo. Lo schizzo viene versato quasi nello stesso modo del solito, ma invece del solito pulsante devi andare. Questo è tutto, ora puoi saldare un colpo nel tabellone.

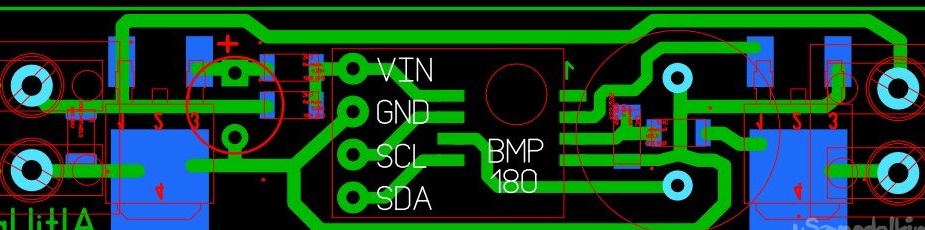
Passiamo ora alle funzionalità del mio circuito. Ho creato un compartimento avionico per l'installazione di una batteria 18650 al suo interno.Come sapete, una batteria agli ioni di litio a batteria singola completamente carica eroga 4,2 volt, la soglia inferiore della tensione di alimentazione per Attiny 85 è 2,7 volt, il livello di scarica critico per tale batteria, ovvero, come capite, la potenza è sufficiente con la testa. MA! Solo se si applica l'alimentazione bypassando direttamente lo stabilizzatore. Non ho iniziato a rimuovere lo stabilizzatore dal circuito, al fine di renderlo più universale, anche se non è coinvolto con me. E così, ci sono cinque sulla scheda per due resistori.
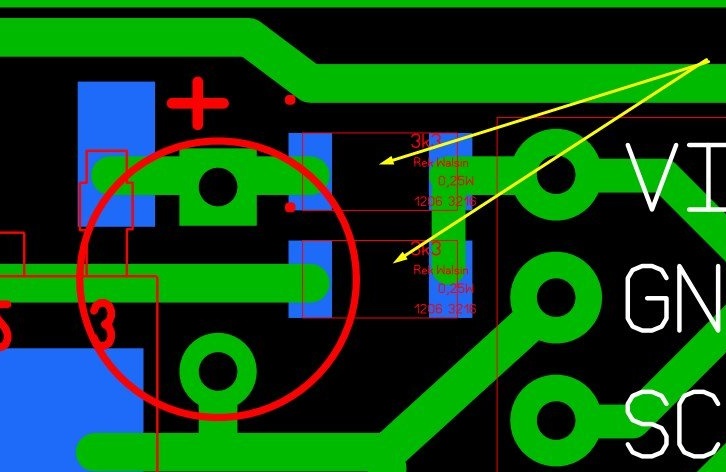
Questi non sono dei veri resistori. Su un paio di questi talloni devi saldare un maglione, la cosiddetta resistenza zero (puoi stupidamente un pezzo di filo). Se, come me, alimenterai il circuito da una tale fonte di alimentazione, quindi salda ai contatti inferiori, se guardi l'immagine, se intendi utilizzare ad esempio una corona, quindi verso l'alto, all'uscita dallo stabilizzatore. Sul circuito stampato, in realtà tutto è visibile, cosa e dove sta andando.
Sulla scheda per i componenti di output, questa opzione non è fornita. Puoi finire tu stesso il sigillo, aggiungendo ad esempio un paio di jumper, o semplicemente non saldare lo stabilizzatore e saldare il jumper.
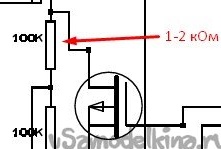
Un'altra sfumatura. Quando è alimentato da una batteria con una tensione di 4,2 volt, può accadere che il transistor sia costantemente aperto. Come puoi vedere dal diagramma, c'è un divisore tra drain e source. Per risolvere il problema, è necessario sostituire uno dei resistori con 1-2 kOhm. Quale è mostrato sotto.
Sulla scheda per i componenti di output, questa opzione non è fornita. Puoi finire tu stesso il sigillo, aggiungendo ad esempio un paio di jumper, o semplicemente non saldare lo stabilizzatore e saldare il jumper.
Un'altra sfumatura. Quando è alimentato da una batteria con una tensione di 4,2 volt, può accadere che il transistor sia costantemente aperto. Come puoi vedere dal diagramma, c'è un divisore tra drain e source. Per risolvere il problema, è necessario sostituire uno dei resistori con 1-2 kOhm. Quale è mostrato sotto.
Ora per il firmware. Ci sono 2 firmware nell'archivio, quello principale per l'attivazione della miccia elettrica del sistema di salvataggio e uno alternativo. Firmware alternativo consente di utilizzare il circuito come segnale di ricerca del suono. Poiché il circuito è molto compatto, può essere posizionato nella carenatura della testa del razzo, scegliendo una fonte di alimentazione compatta. Per fare questo, invece di un fusibile, un potente emettitore piezoelettrico è collegato ai contatti, simile a quello mostrato di seguito.

Qualcuno dirà perché, sul tabellone c'è un cicalino. Sì, ma non importa quanto ti possa sembrare forte durante i test nella stanza, infatti, puoi sentire un soffitto di circa 20 metri sul campo: in generale, i motori di ricerca per i modelli sono completamente epici. Nei piani futuri, ho un assemblaggio di beacon GPS, che determinerà le coordinate e le invierà in onda. Le coordinate vengono ricevute su una stazione radio portatile (walkie-talkie) e usando qualsiasi telefono (ora tutti hanno un navigatore GPS), viene cercato un modello. Ma è nei piani, torneremo alla realtà.
Sebbene, in linea di principio, non ci sia nulla di speciale a cui tornare. Uno speciale telaio è realizzato per la scheda, grazie alla quale è montato su un razzo. Il telaio è fatto apposta per te il modello. L'ho realizzato con le forcine più sottili che potevo comprare in un negozio di costruzioni e pezzi di vetroresina fatta in casa.
Sebbene, in linea di principio, non ci sia nulla di speciale a cui tornare. Uno speciale telaio è realizzato per la scheda, grazie alla quale è montato su un razzo. Il telaio è fatto apposta per te il modello. L'ho realizzato con le forcine più sottili che potevo comprare in un negozio di costruzioni e pezzi di vetroresina fatta in casa.

La scheda è fissata al telaio su normali elastici di cancelleria. È facile da installare e funziona come un ammortizzatore in modo che il sensore non impazzisca.
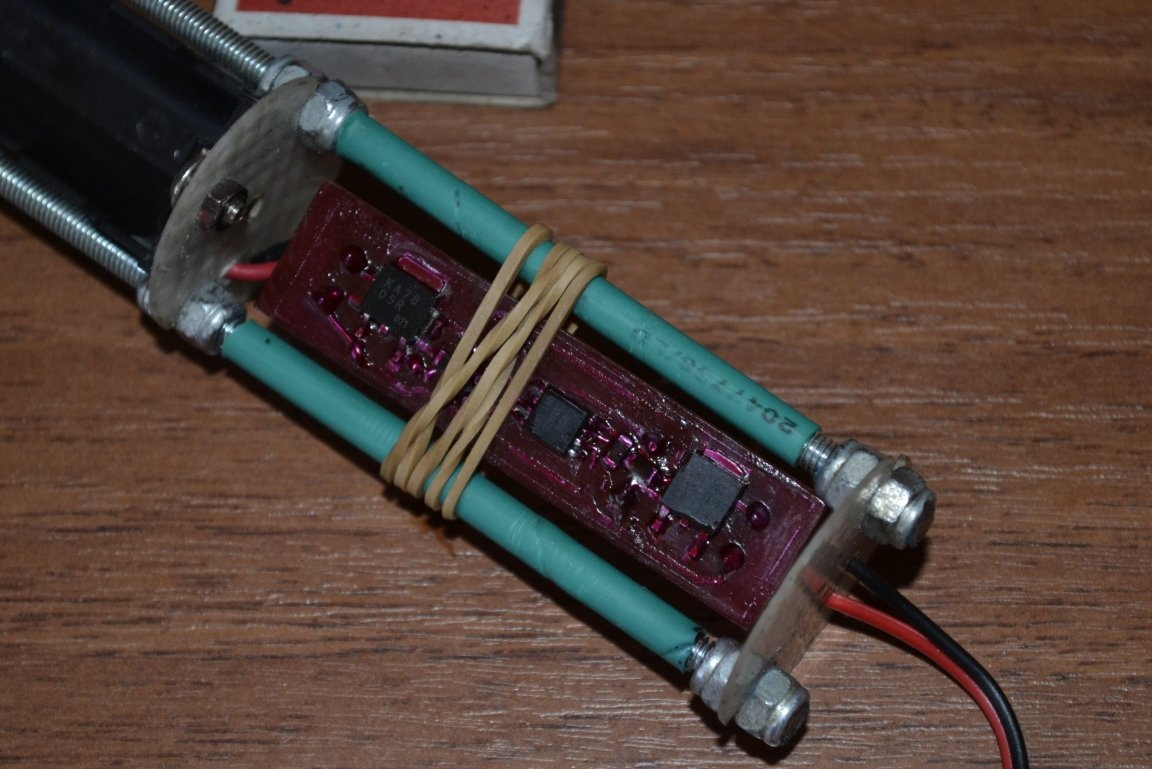
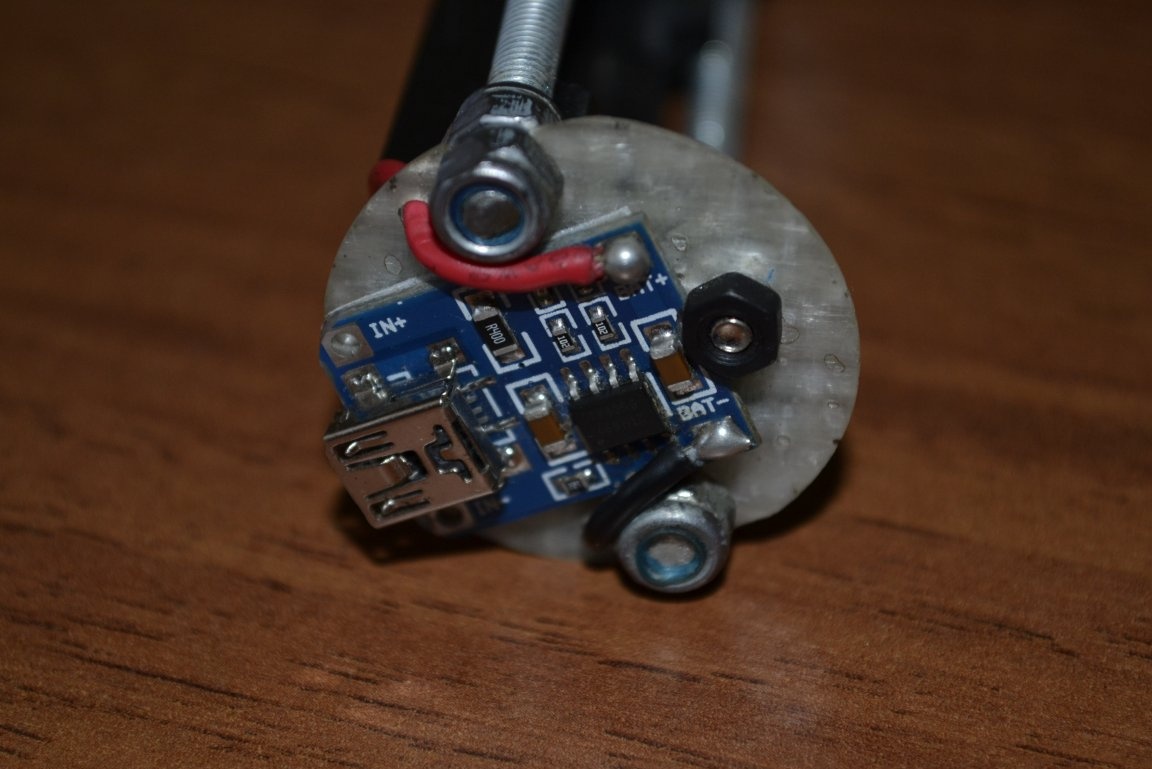
Come puoi vedere la tavola dal lato dei binari che ho dipinto depresso smalto, per una maggiore protezione, per così dire. Dalla fine del telaio, ho deciso di collegare un modulo di ricarica, una volta ho comprato un paio di dozzine su Ali, costano come semi, quindi non è un peccato.
Qualche parola sulla verifica. Prendiamo un barattolo (in modo che il circuito con alimentazione si adatti) e una copertura in nylon. Facciamo un buco nel coperchio e incolliamo ermeticamente il tubo dal contagocce. L'altra estremità del tubo è collegata a una siringa di cubetti di 20. Mettiamo il dispositivo in un barattolo, chiudiamo e pompiamo l'aria con una siringa. Dopo aver restituito l'aria.
La seconda opzione Su consiglio di un modellatore familiare. Prendiamo un tubo da un lecca-lecca, una bacchetta di una penna, un bastoncino per le orecchie. Avvolgiamo diversi strati di nastro elettrico all'estremità in modo che il nastro elettrico si estenda oltre il tubo di alcuni millimetri. Con cautela con un coltello affilato, tagliare il bordo del tubo avvolto, che sarebbe uniforme. Lo applichiamo uniformemente al foro sul sensore stesso e aspiriamo bruscamente l'aria con le nostre bocche. Primitivo, ma funziona.
La seconda opzione Su consiglio di un modellatore familiare. Prendiamo un tubo da un lecca-lecca, una bacchetta di una penna, un bastoncino per le orecchie. Avvolgiamo diversi strati di nastro elettrico all'estremità in modo che il nastro elettrico si estenda oltre il tubo di alcuni millimetri. Con cautela con un coltello affilato, tagliare il bordo del tubo avvolto, che sarebbe uniforme. Lo applichiamo uniformemente al foro sul sensore stesso e aspiriamo bruscamente l'aria con le nostre bocche. Primitivo, ma funziona.
E poche parole, per coloro che hanno una domanda, come viene determinato il climax. In tutti questi dispositivi, questo è implementato allo stesso modo. Durante il volo, l'altitudine attuale viene costantemente confrontata con quella precedente. Non appena questo valore inizia a scendere al di sotto di quello precedente (il razzo ha iniziato a scendere), viene fissato dall'apogeo. Ma affinché non ci siano falsi positivi, l'apogeo è considerato un lancio di un razzo a una certa altezza, di solito una caduta di 3 metri (questo è corretto nel codice), ma per i missili a volo più alto ne mettono di più.
Tutti i file necessari possono essere scaricati da.
Tutto qui. Video con una demo del poster qui sotto. Tutto il successo nel lavoro!