


In questo articolo, il Mago ci mostrerà come ha realizzato l'elicottero da combattimento Lego 60193 Arctic Air Transport il modello Quadrocopter. Il compito principale nella produzione del quadricottero, oltre alle qualità di volo, era quello di salvare quante più parti originali possibili.
Vediamo un breve video che mostra il funzionamento del quadrocopter.
Quindi, per la fabbricazione di un tale quadricottero, il maestro ha usato quanto segue
Strumenti e materiali:
-LEGO City Arctic Helicopter - 60193:
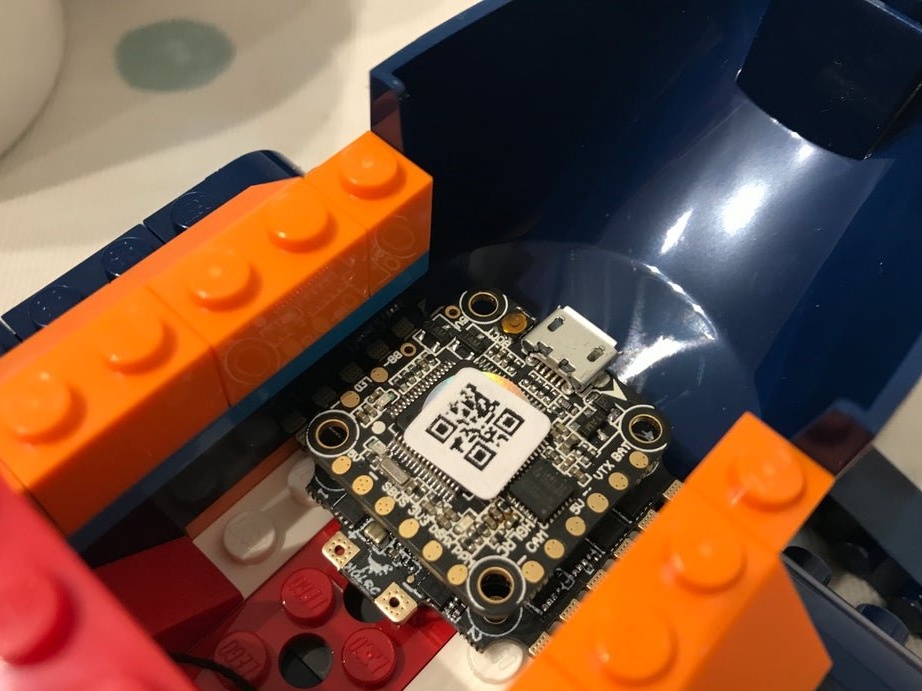
- Controller e ESC 20x20 mm, ad esempio HGLRC XJB F428 Micro F4 AIO OSD;
- Motori brushless - 4 pezzi;
-Propellery;
-Batteria 950 mAh;
-Razemy;
seeing-;
-Modulo radio (trasmettitore e ricevitore);
-Krepezh;
-Nozh;
-Saldatura del ferro;
- Pistola per colla;
- cacciavite;
-Drel;
Primo passo: Lego Build
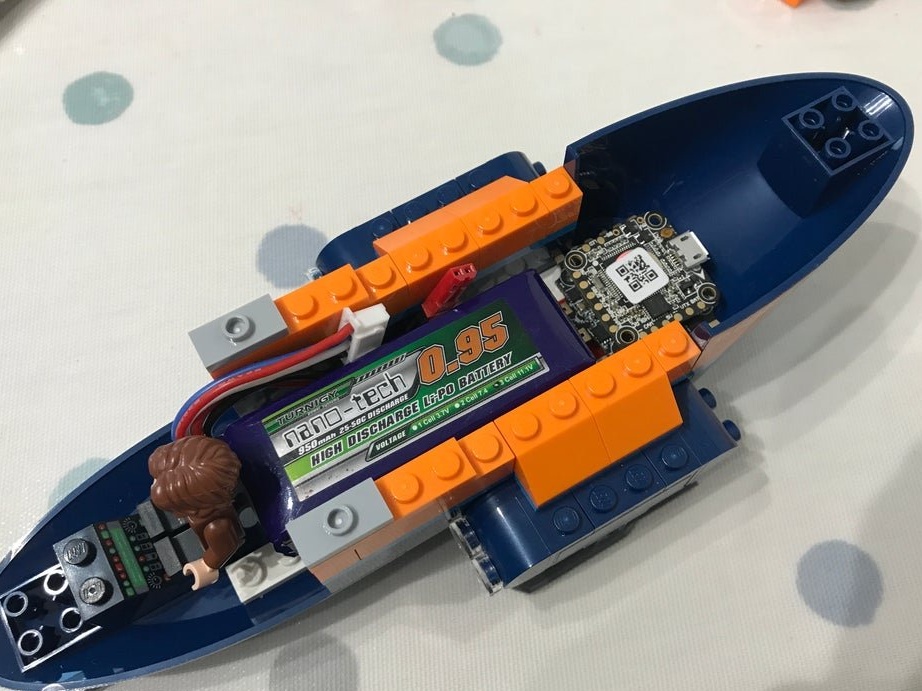
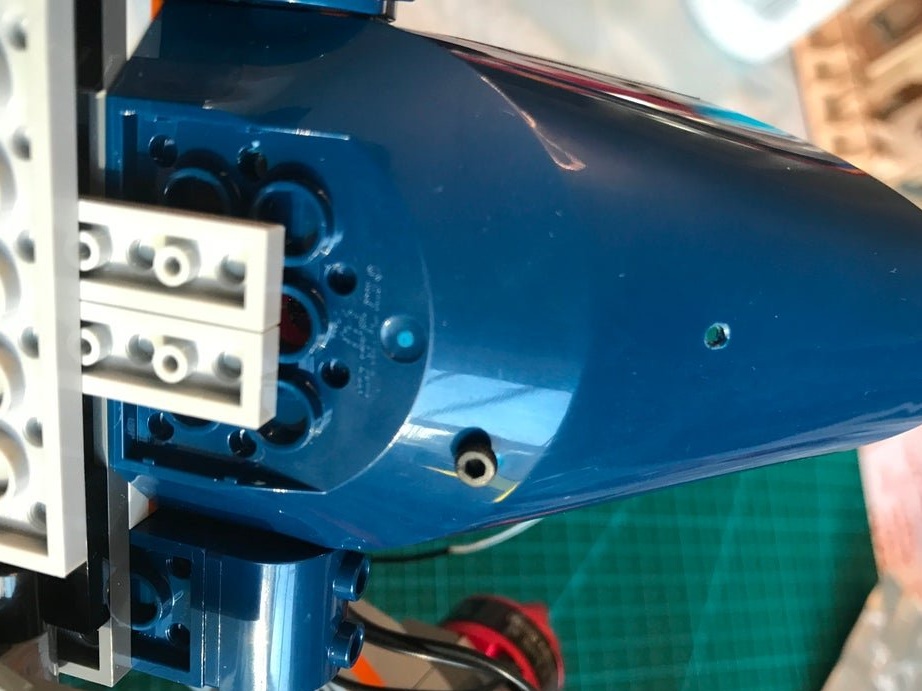
Innanzitutto, il maestro raccoglie l'Artico LEGO. Quindi il modello viene parzialmente smontato. All'interno, è necessario posizionare la batteria e il controller, osservando il bilanciamento del modello.


Fase due: supporto motore
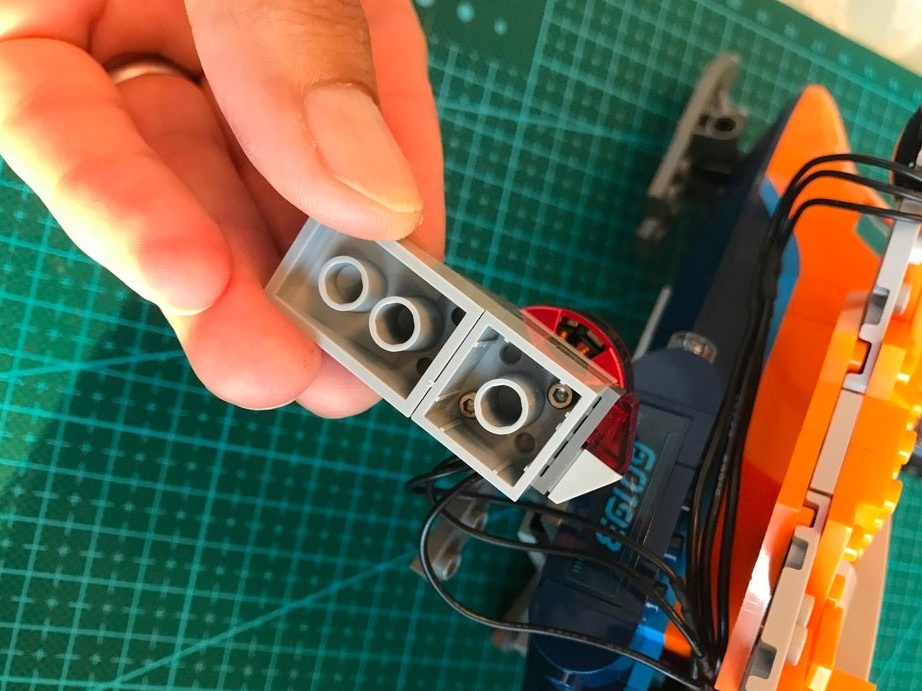
I fori di montaggio per il motore brushless 1806 standard sono praticamente gli stessi dei perni sulla piastra LEGO 2x2 standard. Ogni attacco "motorizzato" sul quadricottero ha una piastrella grigio scuro 2x2 (LEGO 3022) e una piastrella grigio chiaro 2x2 con un perno verticale (LEGO 2460), che di solito è tenuto sui mozzi di un'elica LEGO in cima.
Il master esegue i fori di montaggio. Sui motori, al centro c'è una bassa marea. Un foro sotto di essa viene praticato al centro della piastrella. Protegge i motori.








Terzo passaggio: spalle
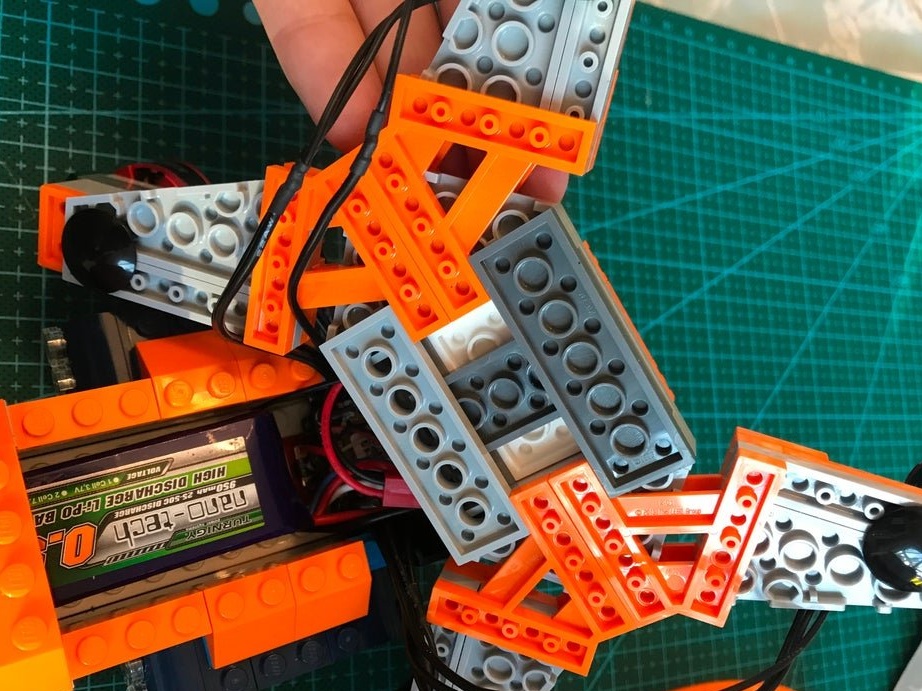
Riorganizzando le "spalle" del quadricottero, è possibile modificare leggermente il layout per fornire una disposizione più ampia o più stretta dei motori e la posizione delle viti l'una rispetto all'altra.
L'assemblaggio LEGO standard (prima foto) ha "spalle" e motori posizionati largamente (orizzontalmente) con una sovrapposizione della vite piuttosto grande. Il maestro rifa le "spalle" e lancia il motore e, di conseguenza, le viti.



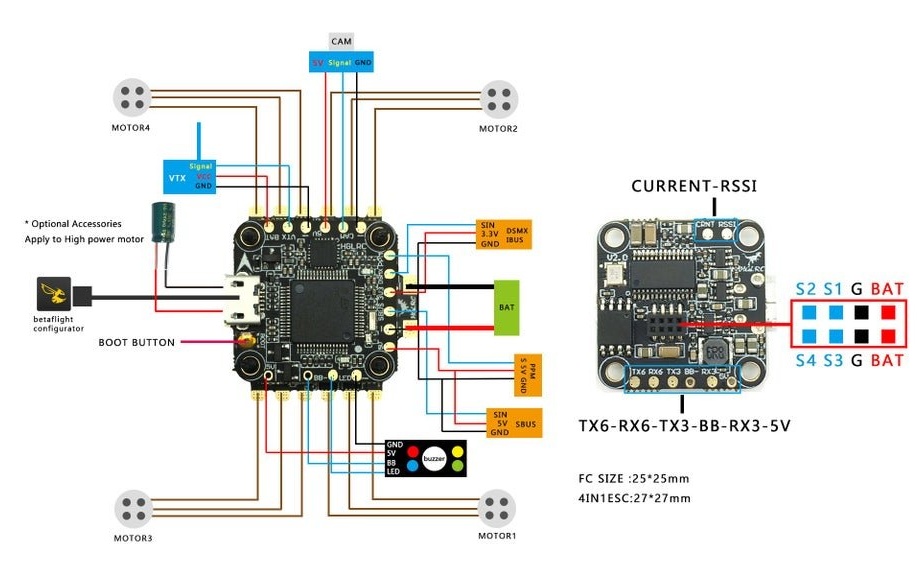
Quarto passaggio: elettronica
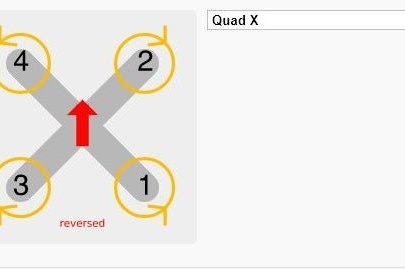
Secondo lo schema, installa l'elettronica. La prima foto mostra un diagramma del senso di rotazione dei motori. Il senso di rotazione può essere modificato anche in fase di programmazione.

Al termine dell'installazione e prima di collegare la batteria, la procedura guidata controlla i collegamenti per evitare rotture o cortocircuiti.
Quando si accende l'alimentazione, si dovrebbero vedere le luci sul controller di volo e alcuni segnali acustici dall'ESC.
Fase cinque: installazione
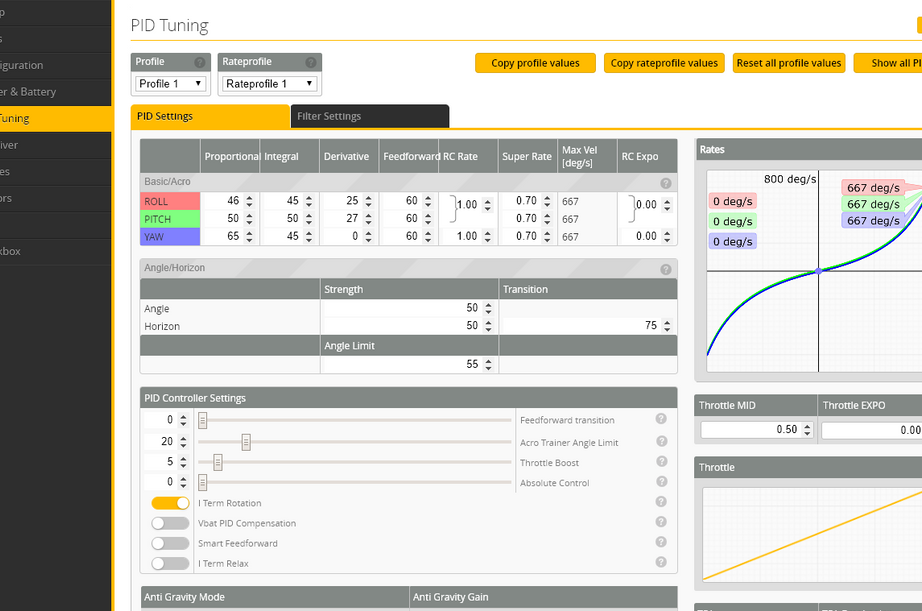
Ora che tutto è collegato, è il momento di configurare il controller.Ciò significa scaricare software (software incorporato) che esegue il compito di decodificare i segnali di controllo dal trasmettitore RC, elaborare il segnale di ingresso del sensore (acceleratore, giroscopi) e fornire segnali di controllo all'ESC per ruotare i motori a una determinata velocità.
Rimuovere le eliche per sicurezza! Non è necessaria una batteria per i primi passaggi di installazione, solo l'alimentazione USB.
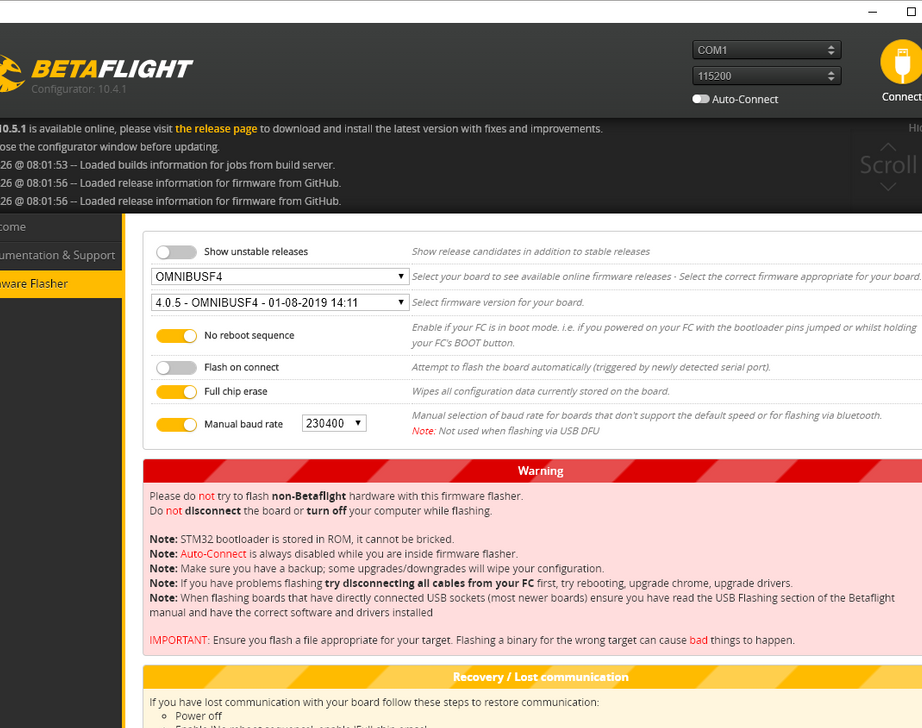
Scarica Beta Configurator
Collegare il cavo micro USB al controller di volo. Si noti che ciò potrebbe essere più semplice se il controller non è avvitato allo chassis.
Scarica e carica il firmware appropriato per il controller di volo.
betaflight-settings-legoquad.txt
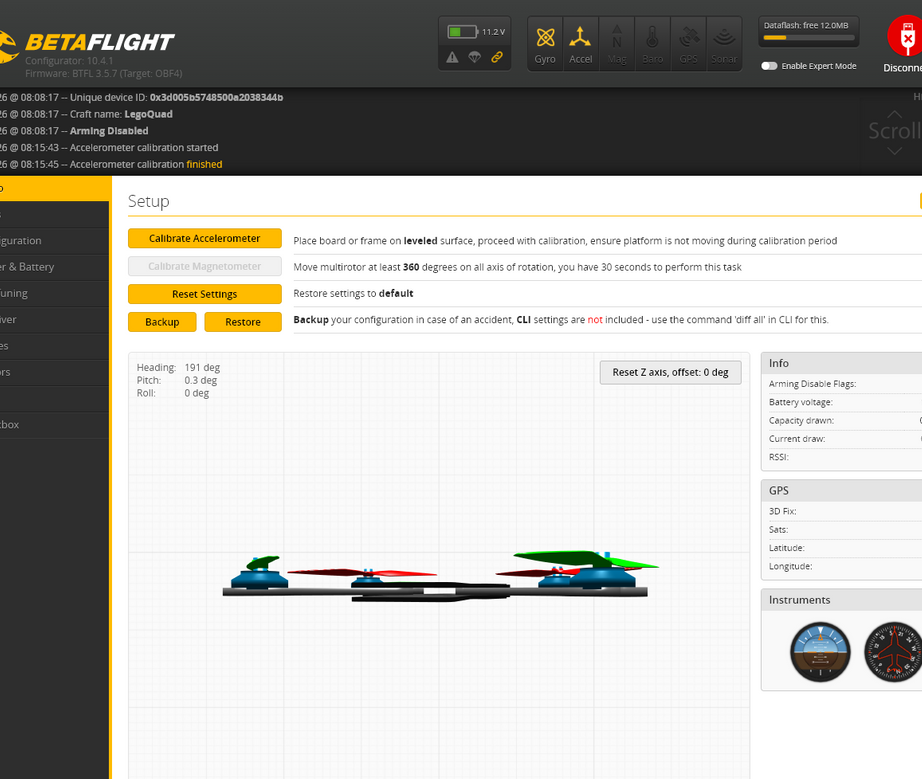
Fai clic sul pulsante "Connetti" e configura le seguenti impostazioni:
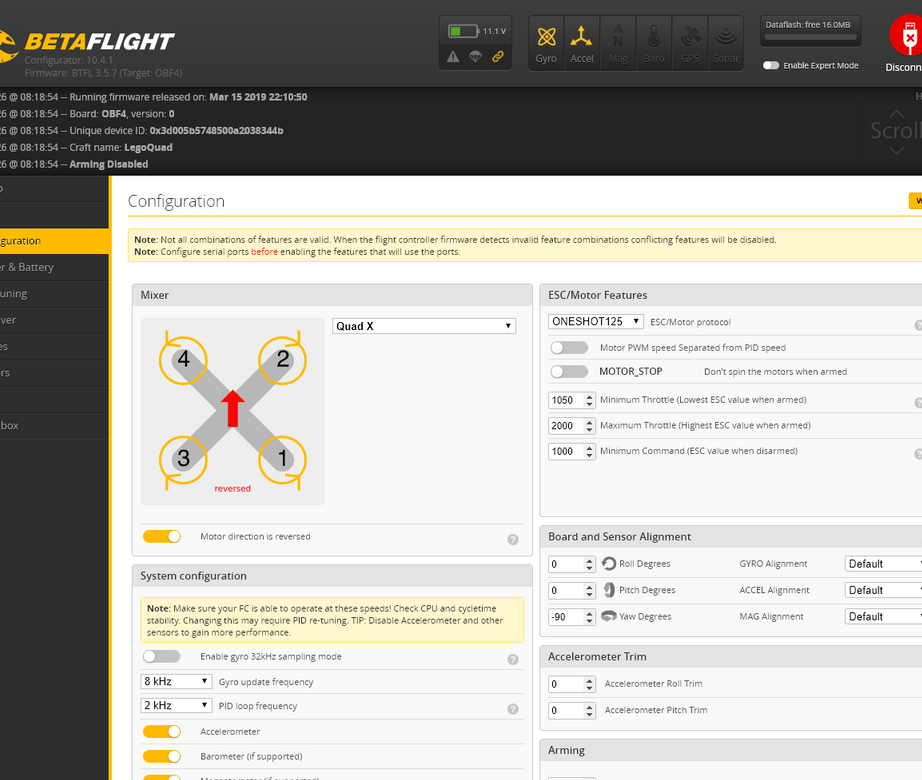
1. Impostazione: calibrazione del modello dei motori
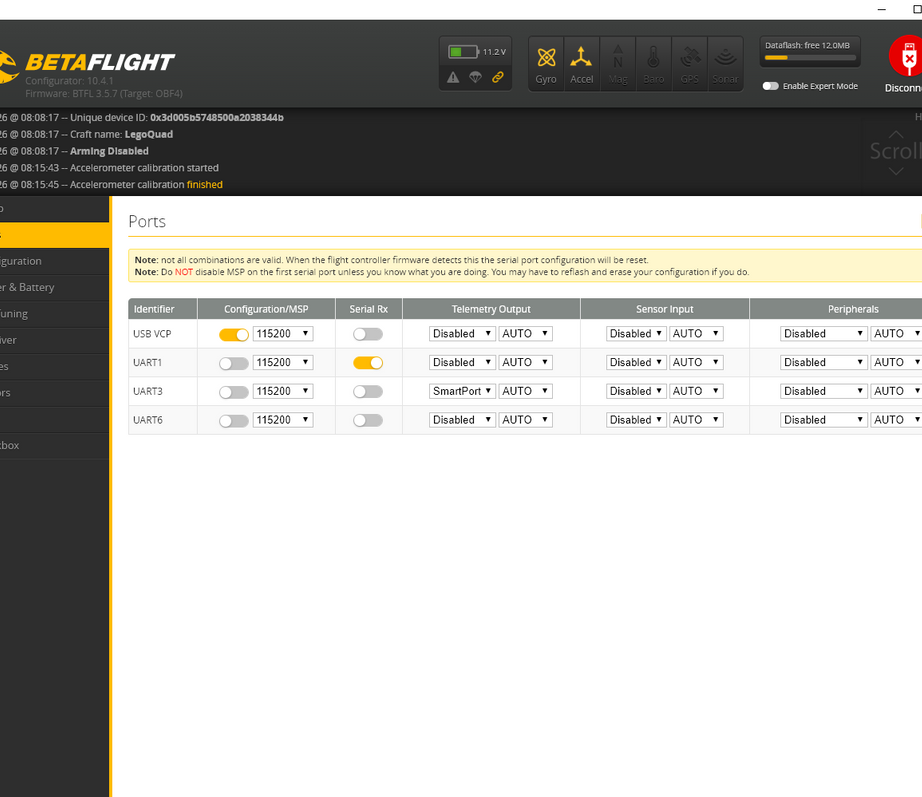
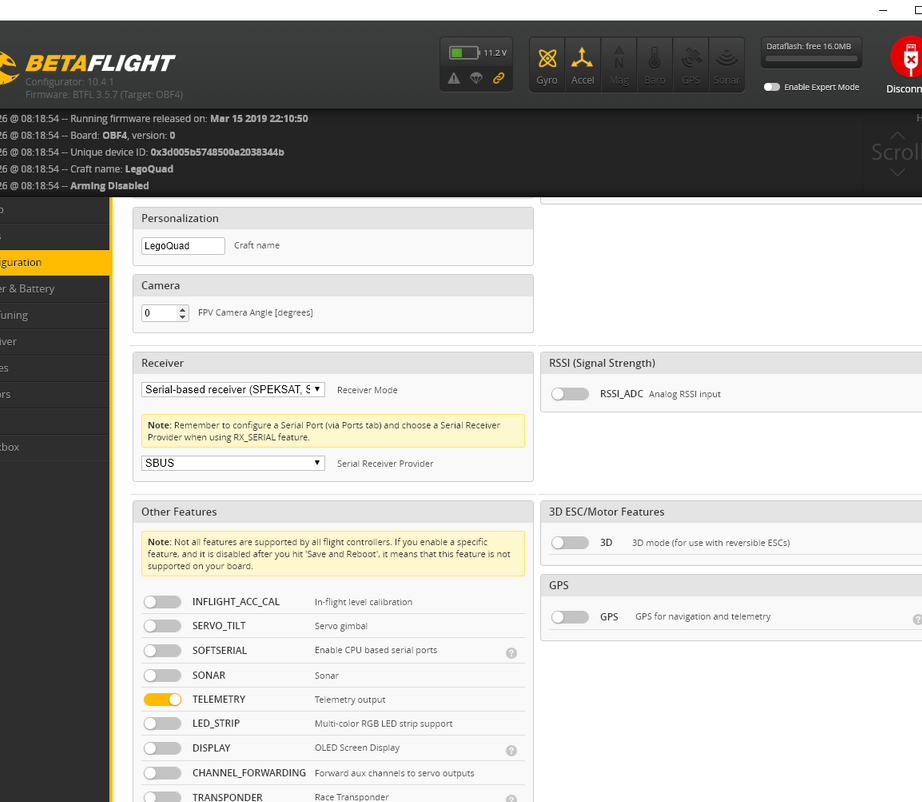
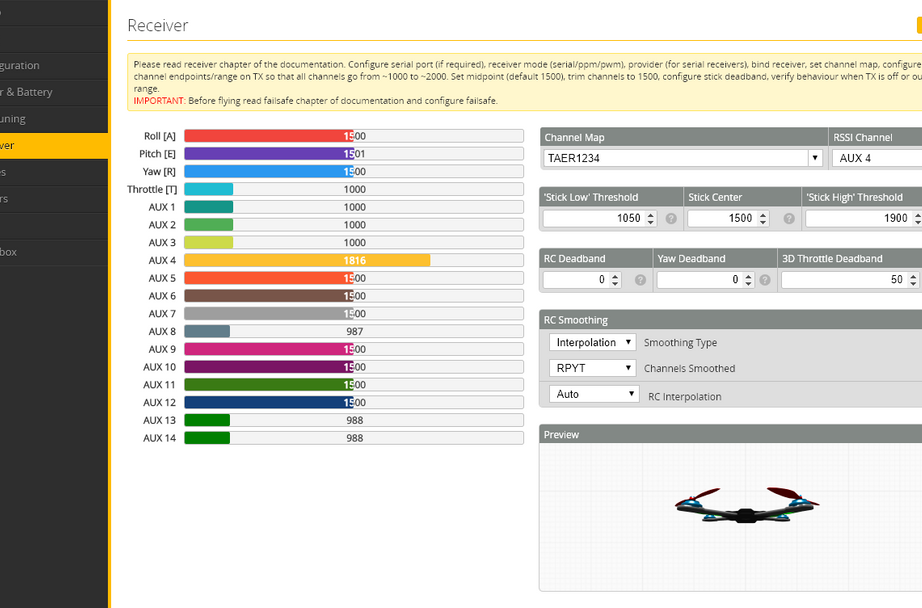
2. Specificare le porte - UART1 - RX seriale per il collegamento del ricevitore SBUS RC
3. Salvataggio e riavvio
4. Stabilire una connessione tra il ricevitore e il trasmettitore
5. Sovraccarico
6. Il valore per il master PID è impostato su 250
7 Collegare la batteria
8. Regola la tensione.
9.Assicurati che la visualizzazione del tuo canale e la direzione del controllo siano corretti, quando tutto è impostato, l'immagine del modello del quadricottero nell'angolo in basso a destra dovrebbe spostarsi in tutte le direzioni corrette quando si muovono i joystick sul controller RC.
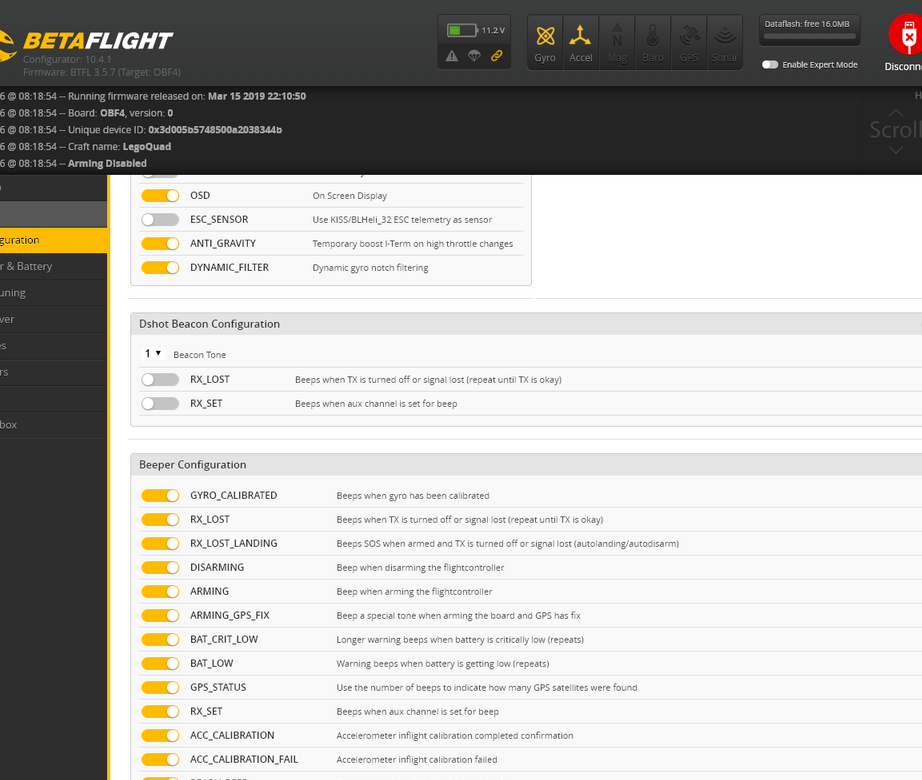
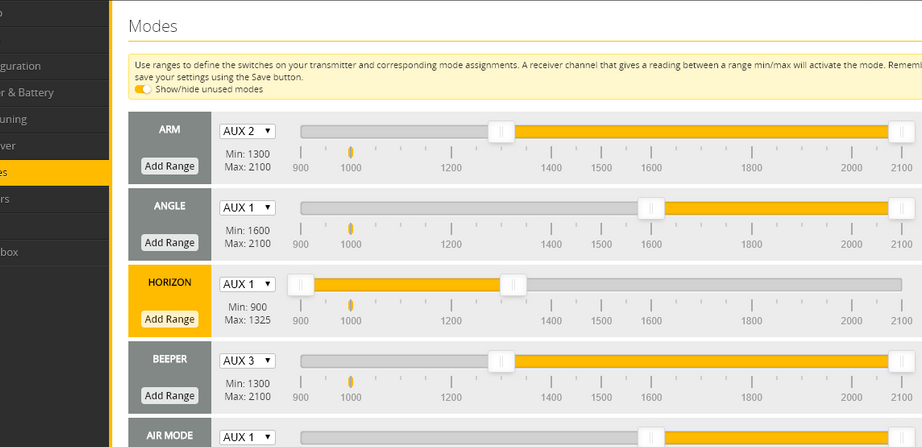
Configura le modalità.
ARM acceso / spento
HORIZON autolivellante / ACRO per volo FPV tradizionale
BEEPER - Utile se perdi il modello in erba alta o cespugli.
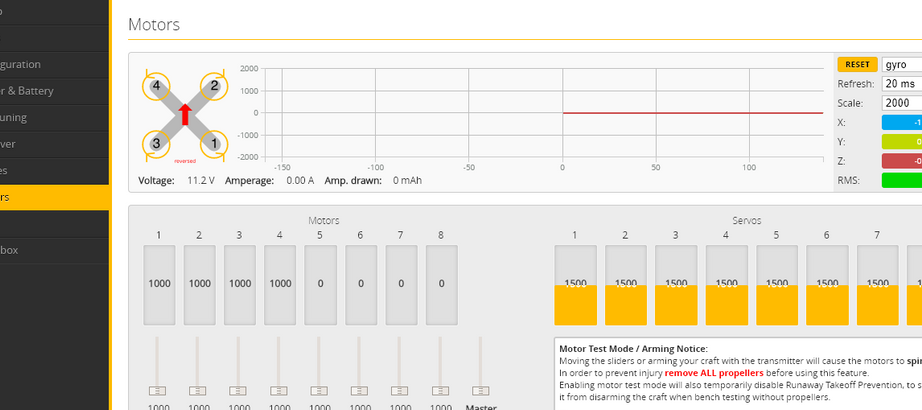
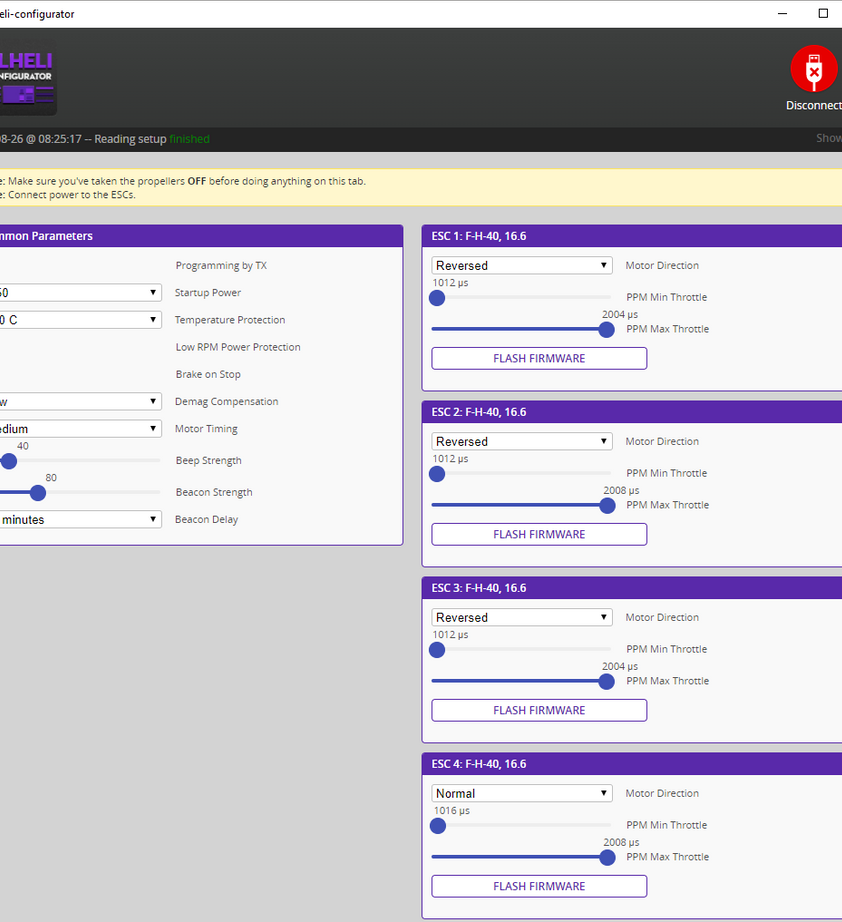
Scheda "Motori": utilizzare questa opzione per controllare ciascun motore singolarmente e, soprattutto, contrassegnare il senso di rotazione di ciascuno di essi
Correggere qualsiasi direzione di rotazione errata con il configuratore BLHELI
Dopo tutti questi passaggi, è possibile scollegare USB e batteria, quindi accendere l'alimentazione e verificare che tutto funzioni:
Accendi il trasmettitore e accendi
Collegare la batteria e montare il quadrocopter su una superficie piana
Accendere l'interruttore ARM e i motori dovrebbero iniziare a girare a bassa velocità.
Controllare l'acceleratore aumentando la velocità
In modalità orizzontale, prova a inclinare il quadricottero e assicurati che i motori reagiscano in modo appropriato, ad esempio inclinalo in avanti e i motori anteriori accelereranno.

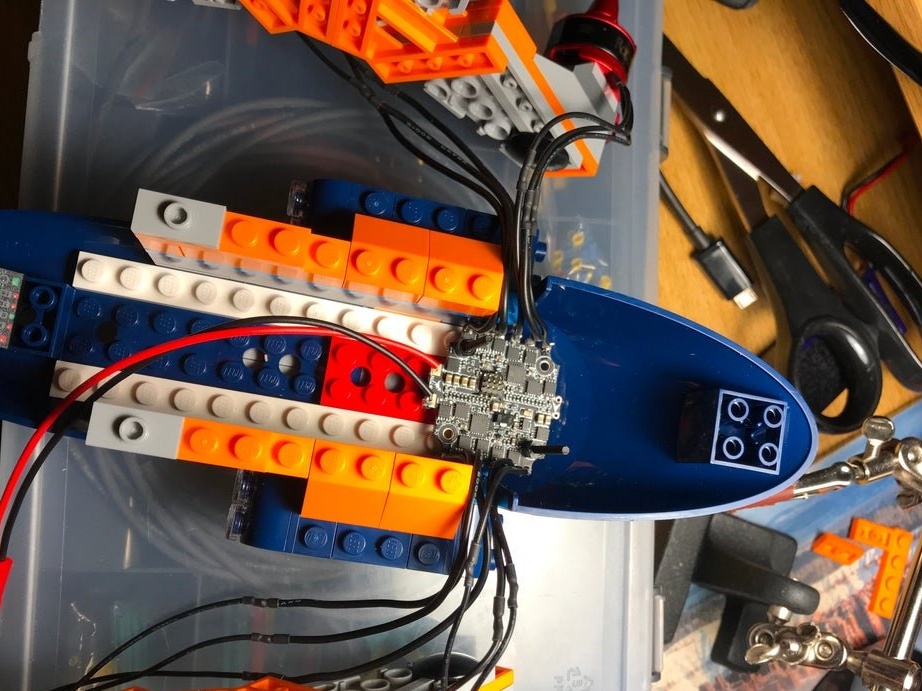
Fase sei: Assemblea finale
Praticamente l'intera struttura della custodia è trattenuta da blocchi di montaggio. Il master utilizza solo adesivo hot-melt per montare i motori.


Tutto è pronto e puoi testarlo.



