




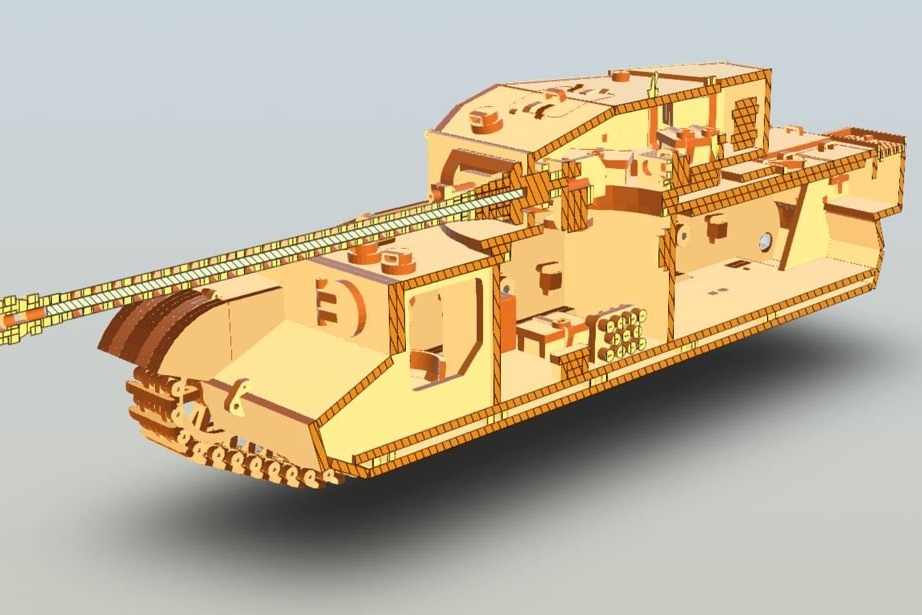
Questo serbatoio non è il primo assemblaggio del master. Una caratteristica distintiva di questo particolare modello è una sospensione a molla, che equipaggia il modello con un motore, la manutenibilità.
Guardiamo una demo.
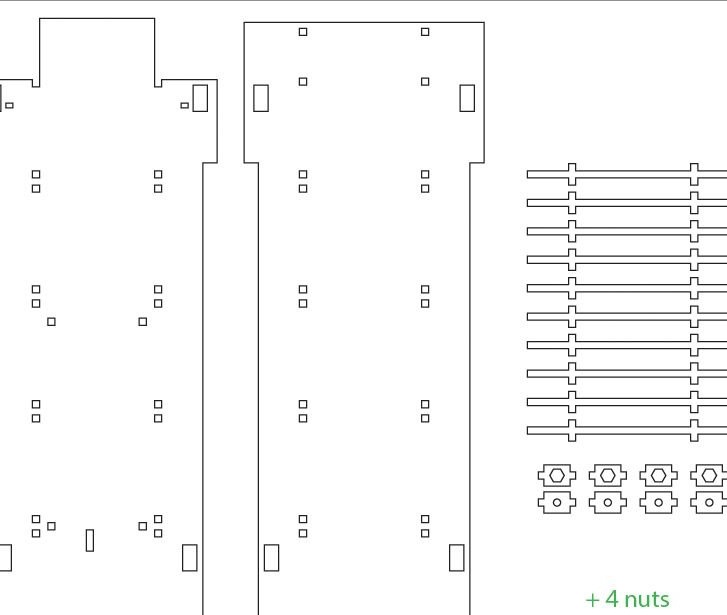
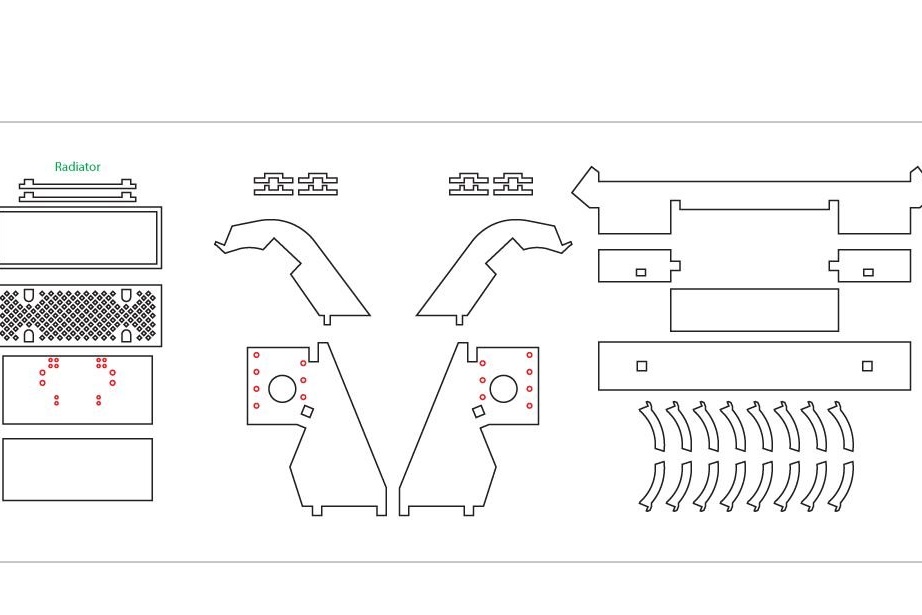
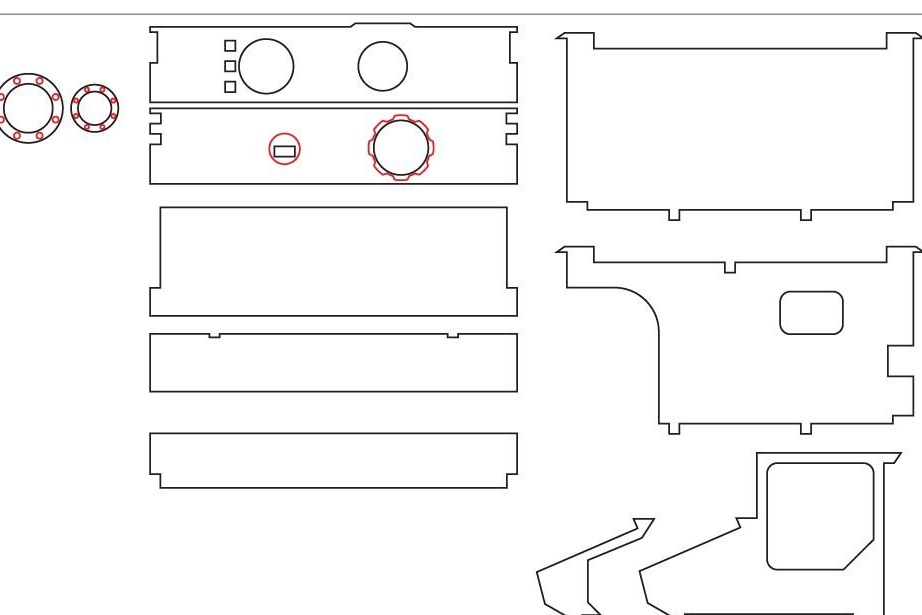
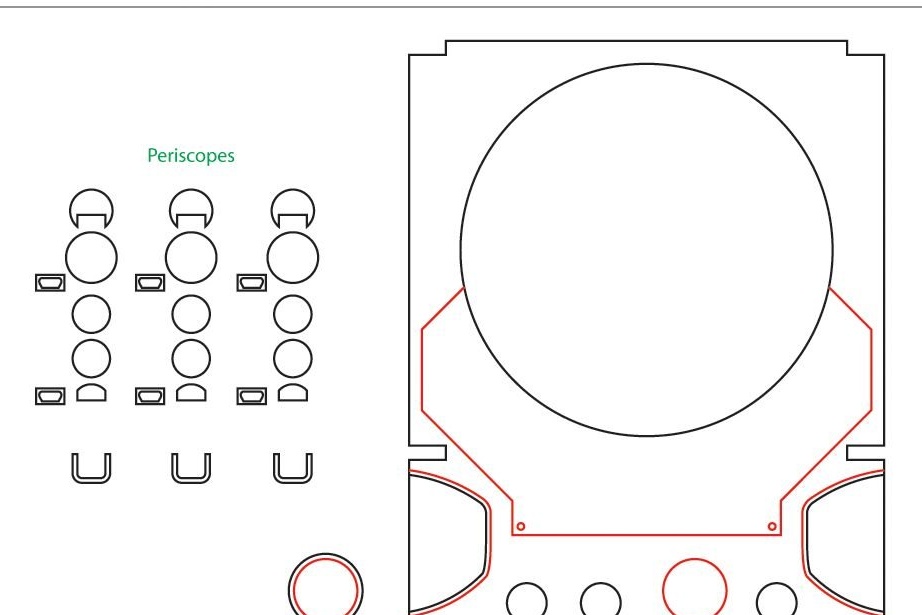
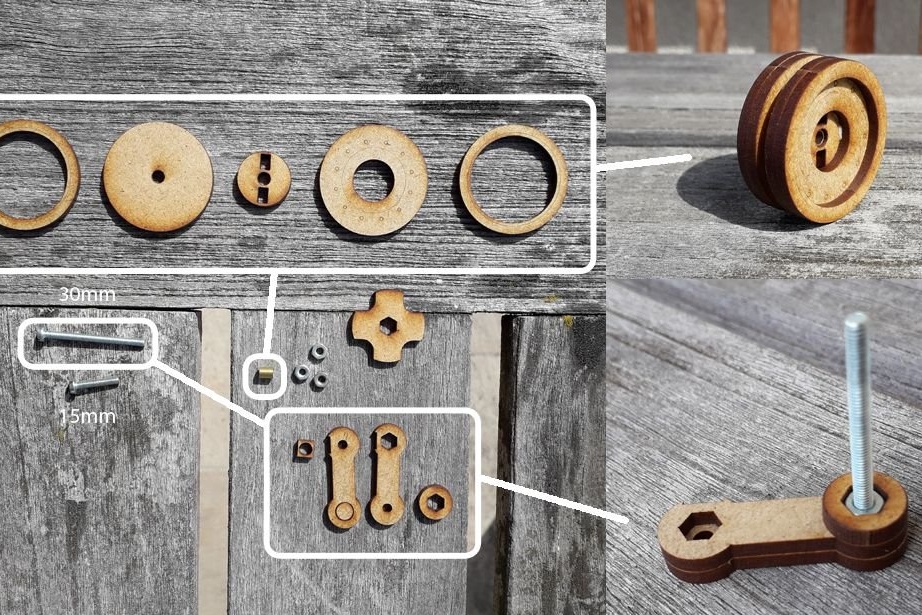
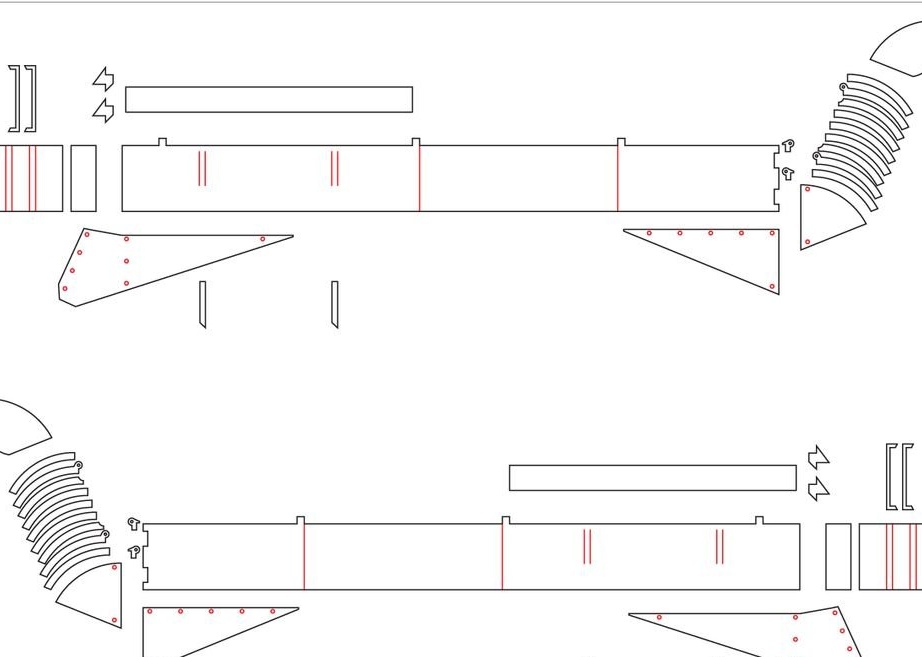
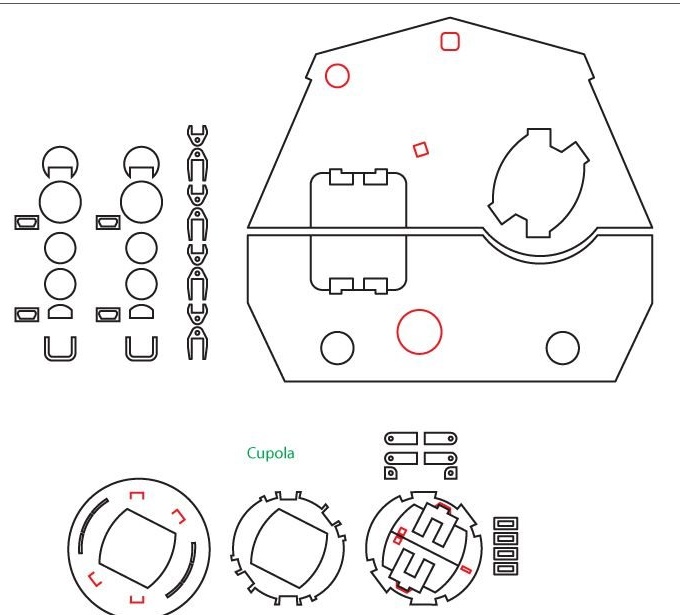
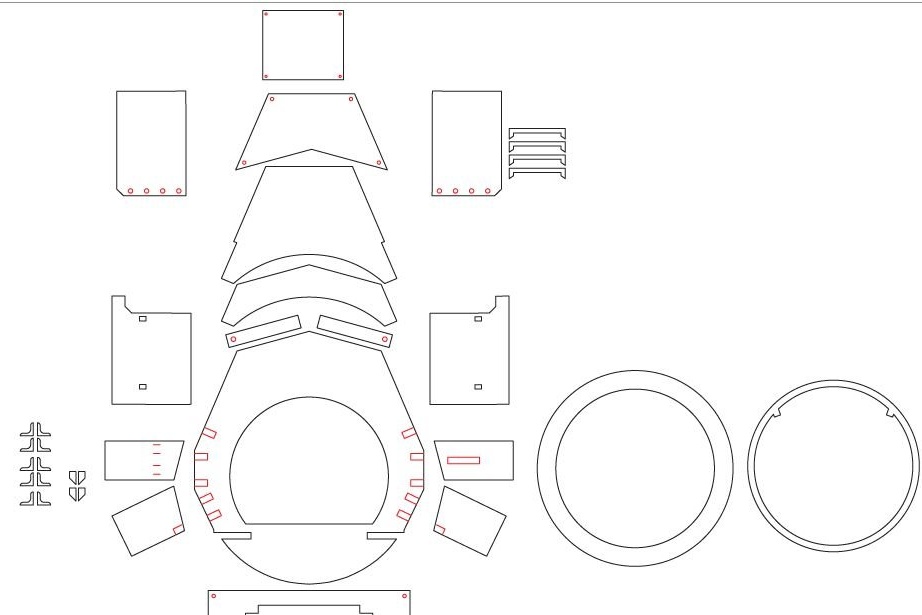
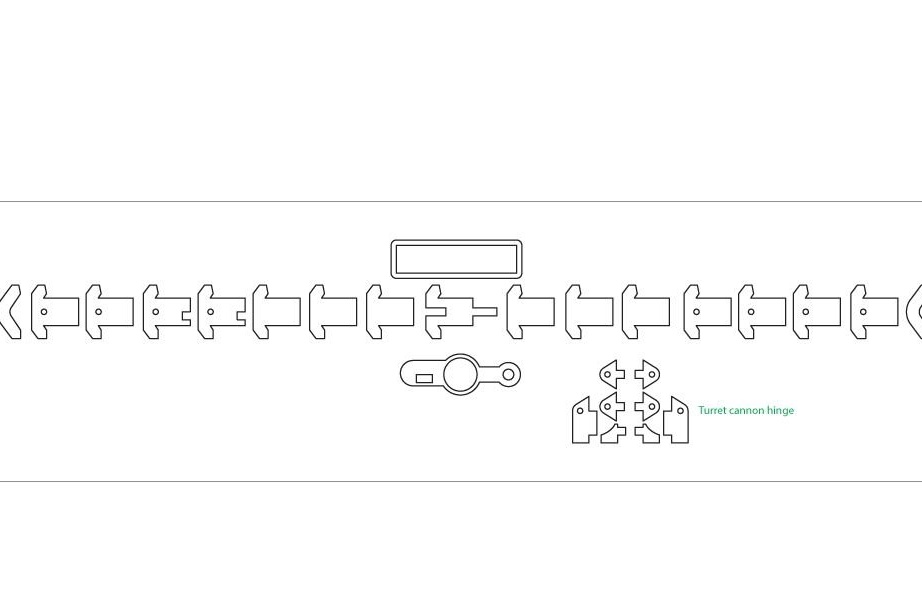
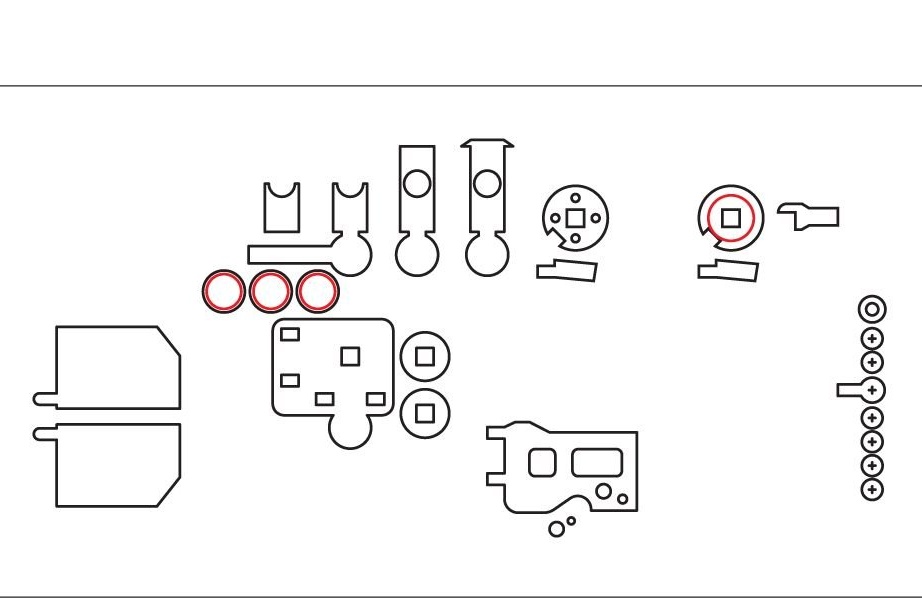
I dettagli del caso sono ritagliati su una taglierina laser e i file sono disponibili all'indirizzo questo link.
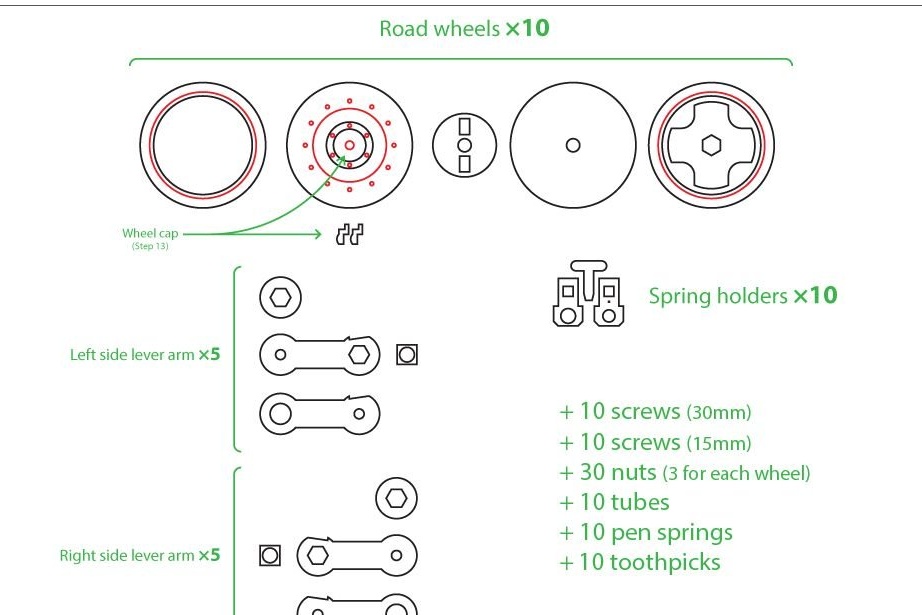
Oltre ai dettagli del caso, avrai bisogno di quanto segue
Strumenti e materiali:
- Viti Ø 3 mm:
-14 pezzi lunghi 15 mm,
-10 pezzi lunghi 25 mm,
-10 pezzi lunghi 30 mm.
-Tubi x20 Ø4 mm (diametro interno Ø3 mm);
-Filo metallico Ø 1 mm;
-Asta filettata Ø3 mm;
-Spring per pendenti Ø 4,5 mm e una lunghezza di 30 mm -10 pezzi;
- Viti M4 2 pezzi;
-Zubochistki;
bordo -Maketnaya;
Microcontrollore ESP8266;
-Collegamento dei fili;
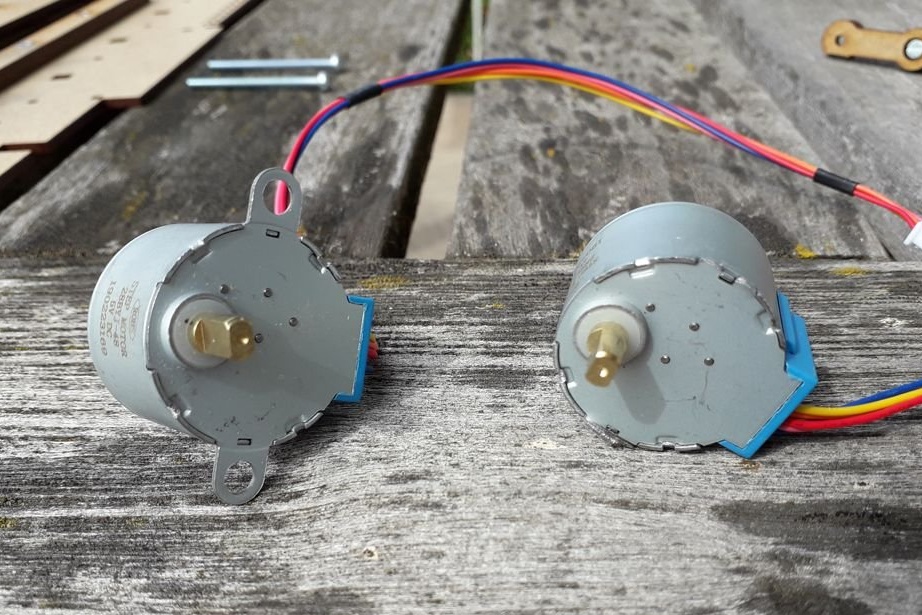
- Motore 28BYJ-48 con una scheda di controllo - 2 pezzi;
-Batteria 5V;
Primo passo: revisione
In questo passaggio, il maestro espone il suo il modello serbatoio e indica anche il link al sito in cui è possibile vedere il serbatoio in una forma smontata.
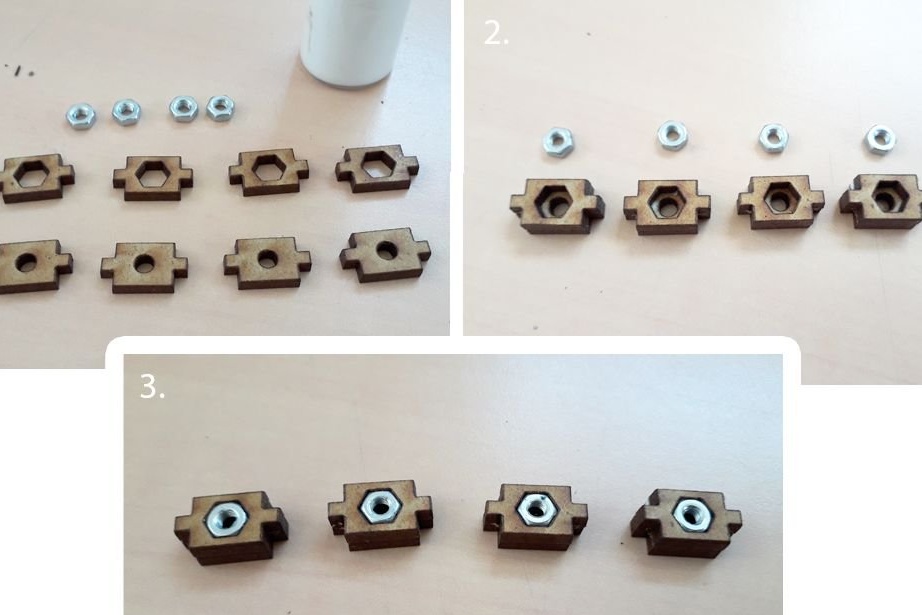
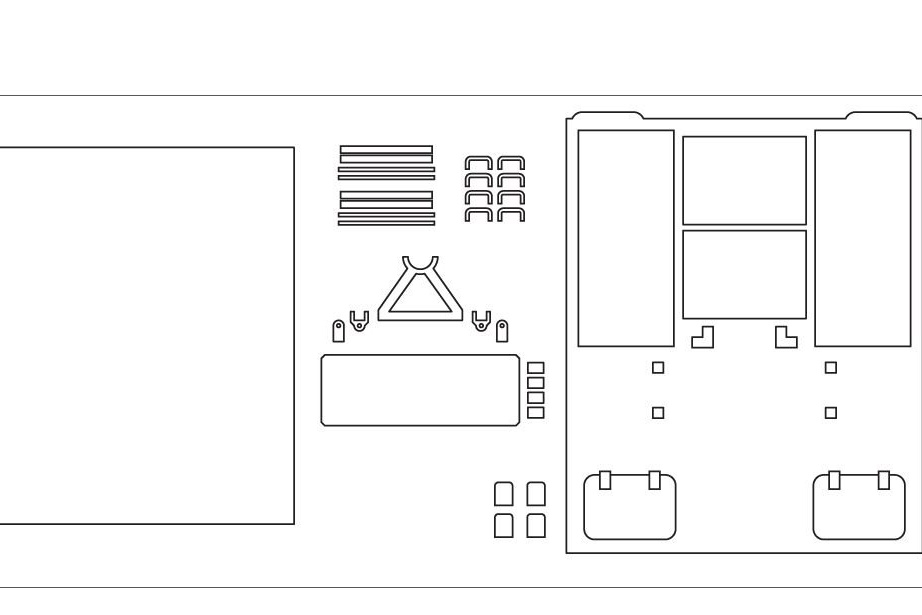
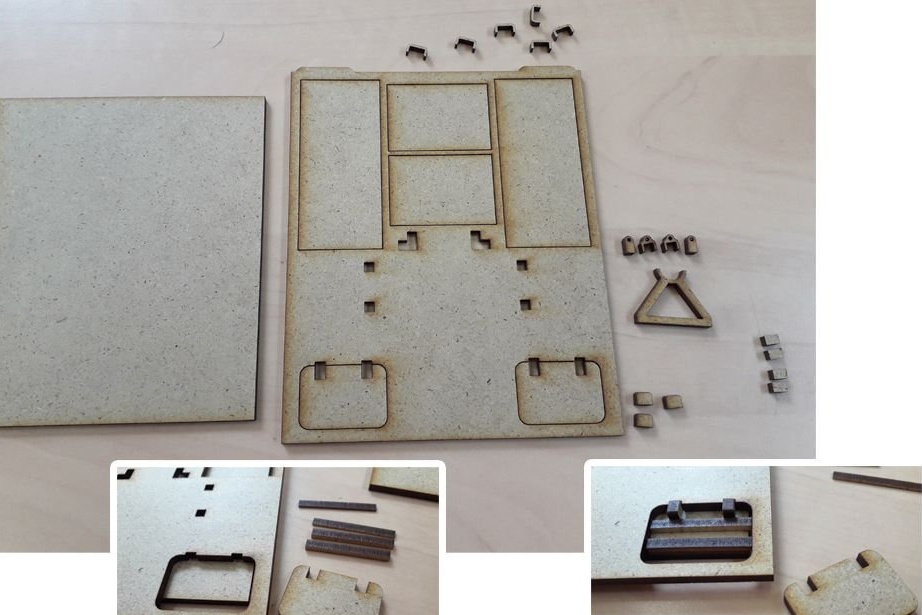
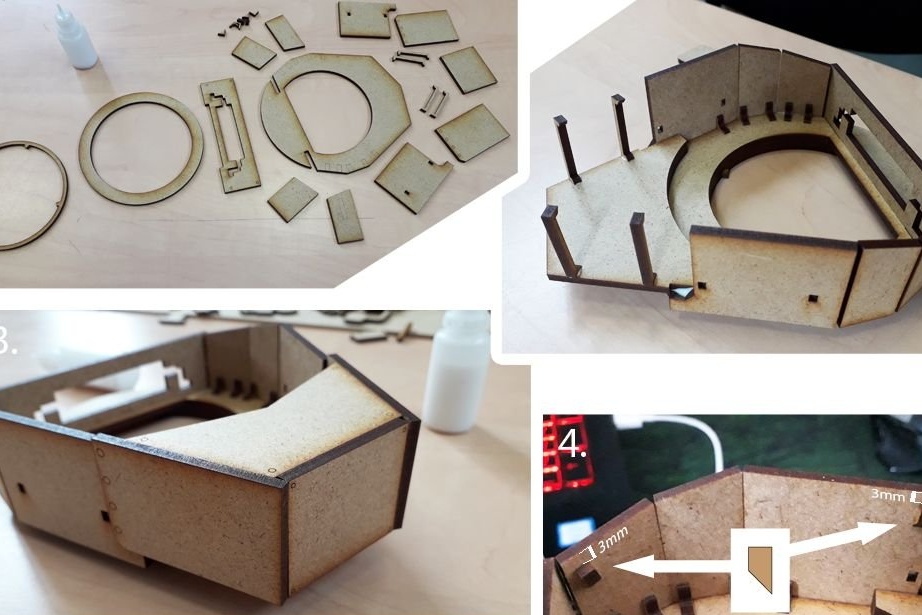
Fase due: in basso
Il master inizia il montaggio dal fondo del serbatoio. Installa dadi nei supporti. Si monta ai lati del fondo. Stabilisce i supporti. Imposta il secondo livello.
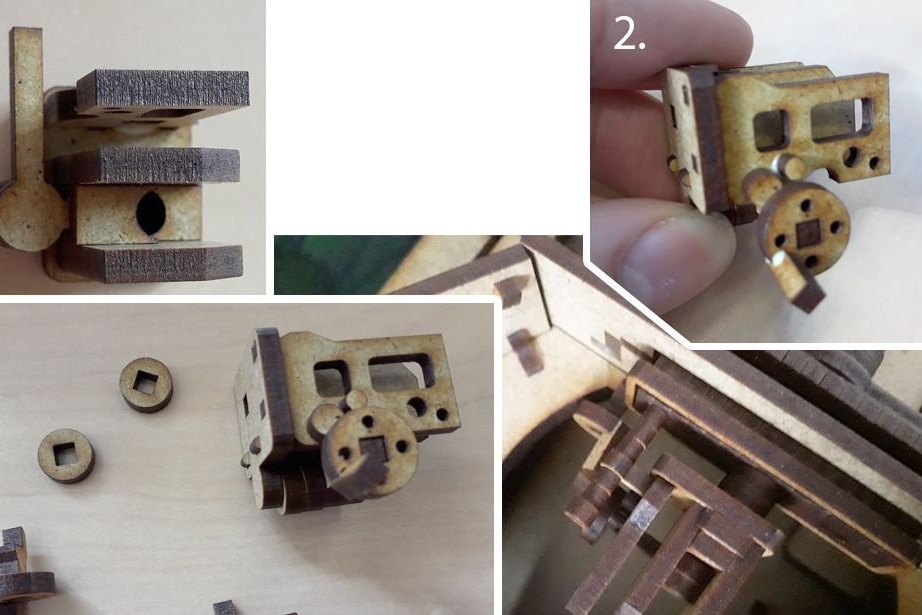
Terzo passaggio: caso
Inizia l'assemblaggio del corpo. Assembla un radiatore e una parte posteriore.
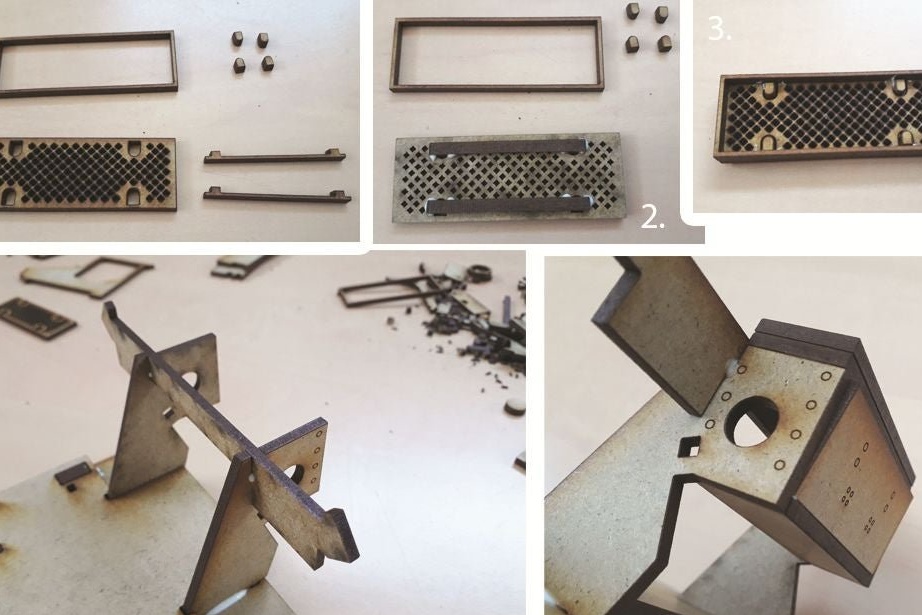
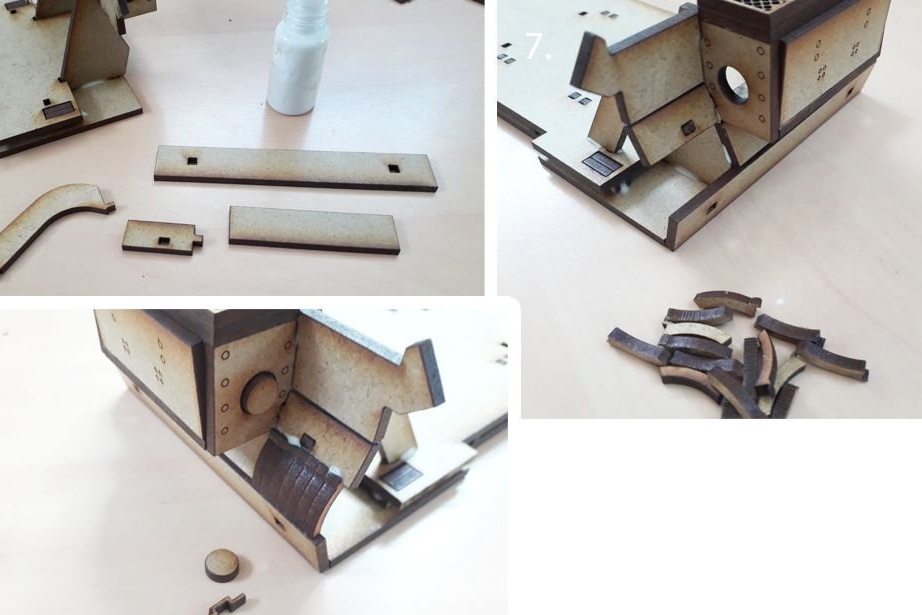
Riunisce il fronte.
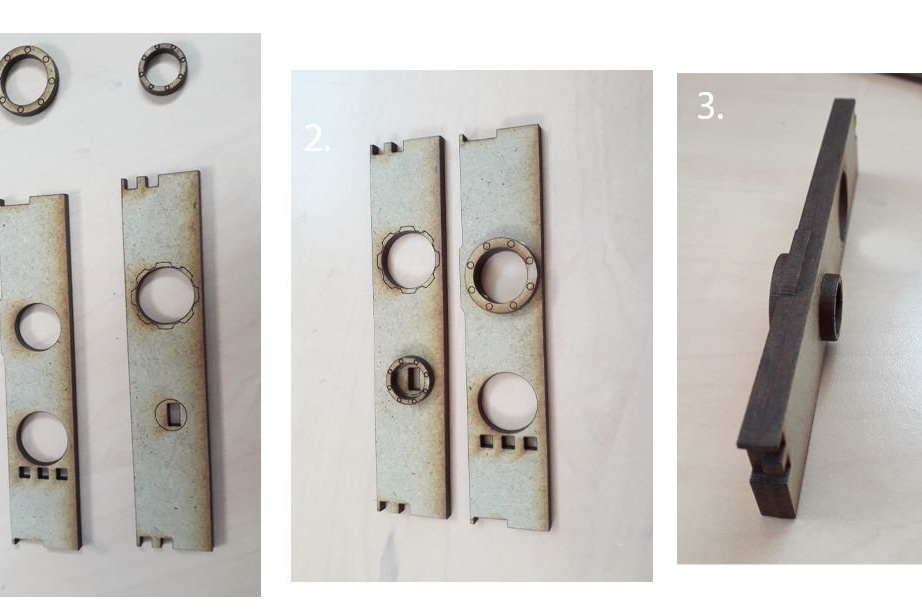
Dopo aver posizionato l'armatura anteriore, lo scafo è finito. Altre parti verranno avvitate o incollate senza incollarle
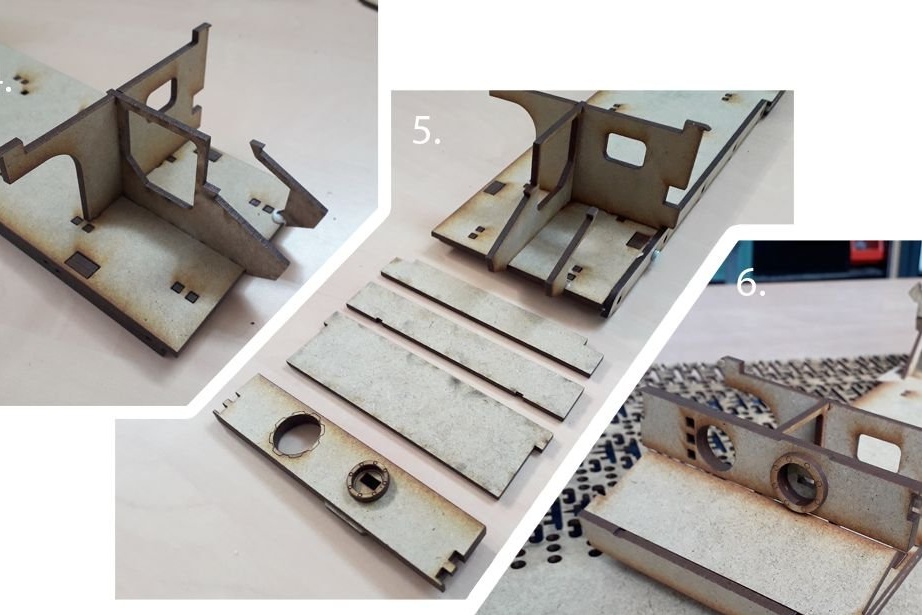
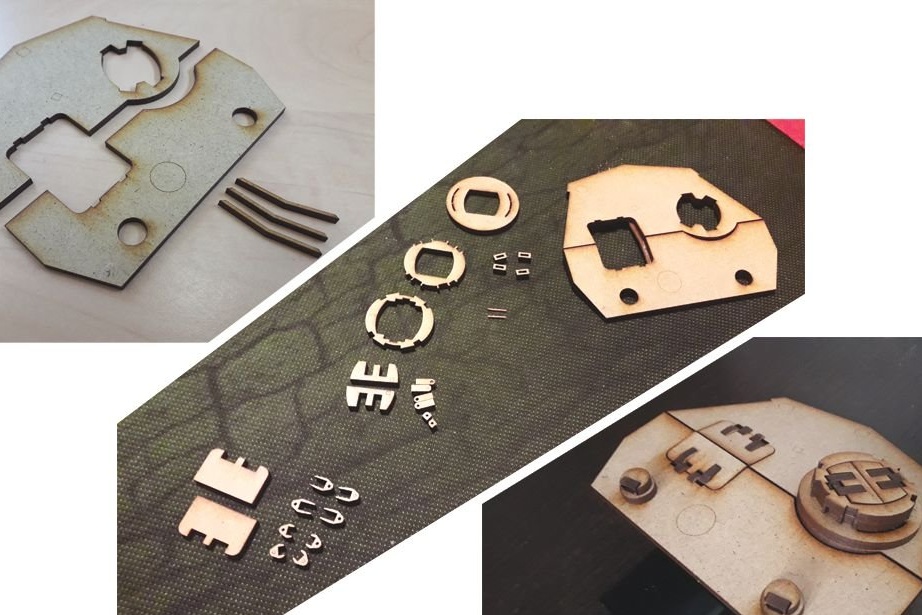
Quarto passaggio: tetto e periscopio
Questa parte è una parte rimovibile. Questo viene fatto per avere accesso all'interno. La leva del periscopio è installata all'estremità del tetto. Il periscopio è posizionato sul tetto, ma non si attacca ad esso.

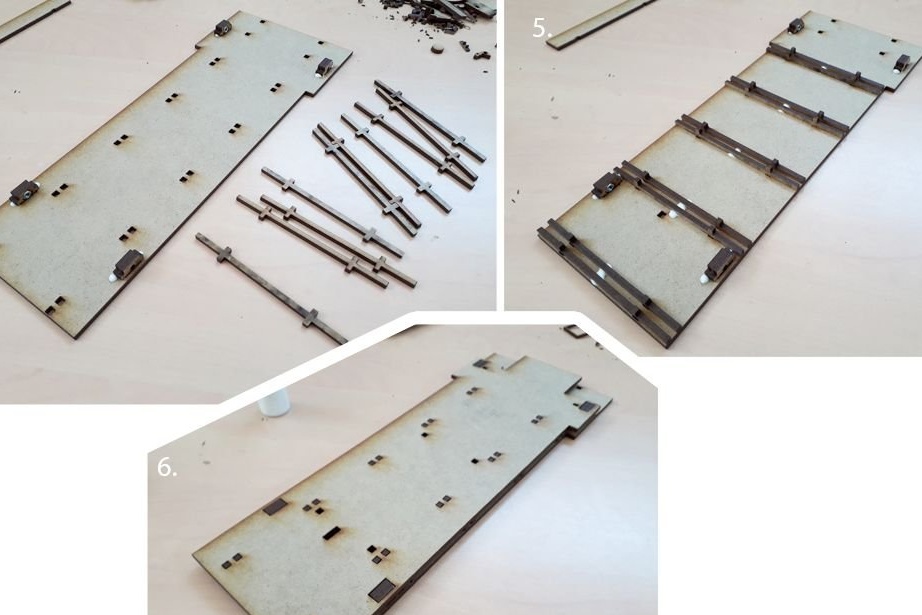
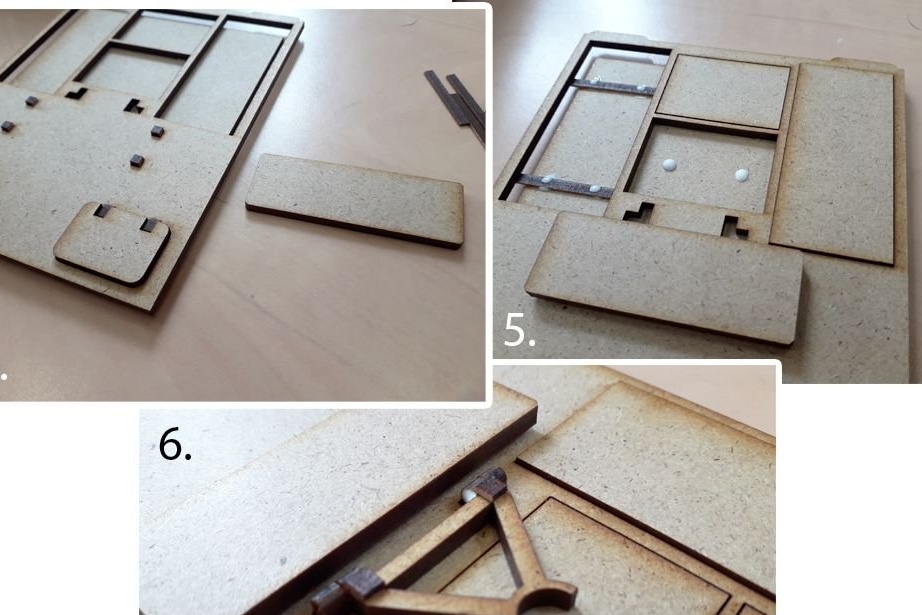
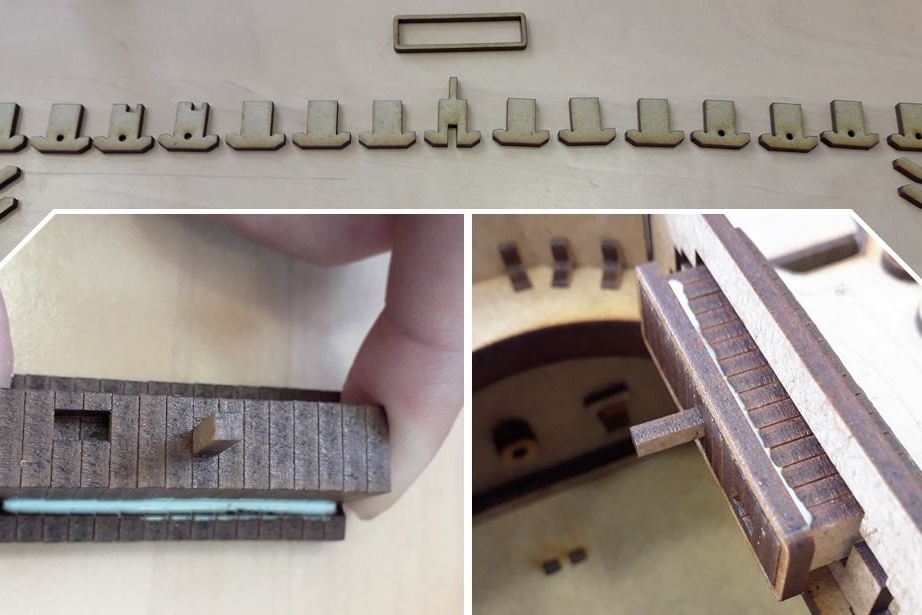
Fase cinque: lato
I bracci di sospensione sono montati sulla parete laterale. È avvitato al doppio fondo con viti da 15 mm usando 4 dadi che sono stati fissati nel primo passaggio.



Passaggio 6: sospensione
Assembla e installa componenti di sospensione. Tutti i passaggi si riflettono in dettaglio nelle fotografie. Applicare un po 'di colla alle estremità delle molle per il fissaggio. All'interno delle molle si trovano pezzi di stuzzicadenti. Ciò impedirà alle molle di scoppiare.

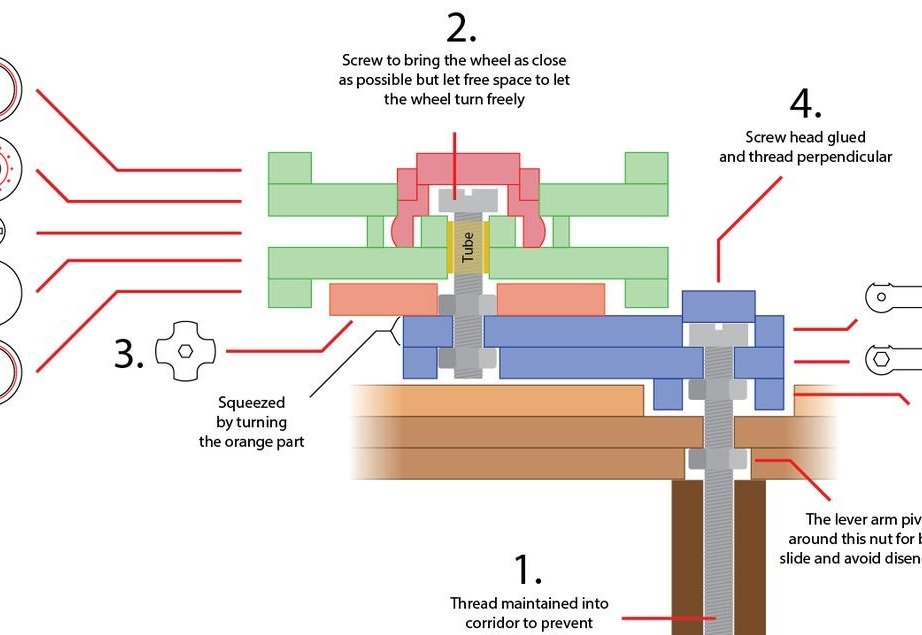
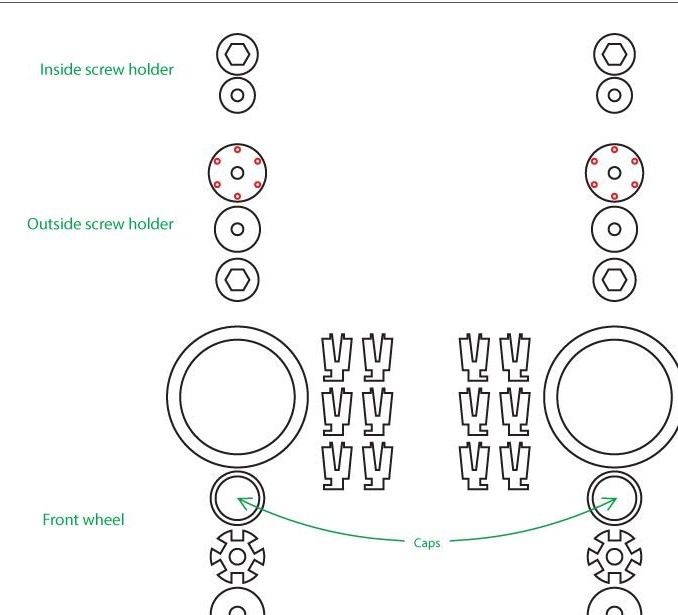
Assembla e installa la ruota inferiore anteriore. All'interno del mozzo della ruota sono installati un tubo di ottone e una vite da 20 mm. Quindi l'hub viene chiuso con una spina.

Assembla e installa piuttosto una ruota.


Assembla e installa le ruote motrici. Queste ruote saranno collegate ai motori installati nel serbatoio del serbatoio.
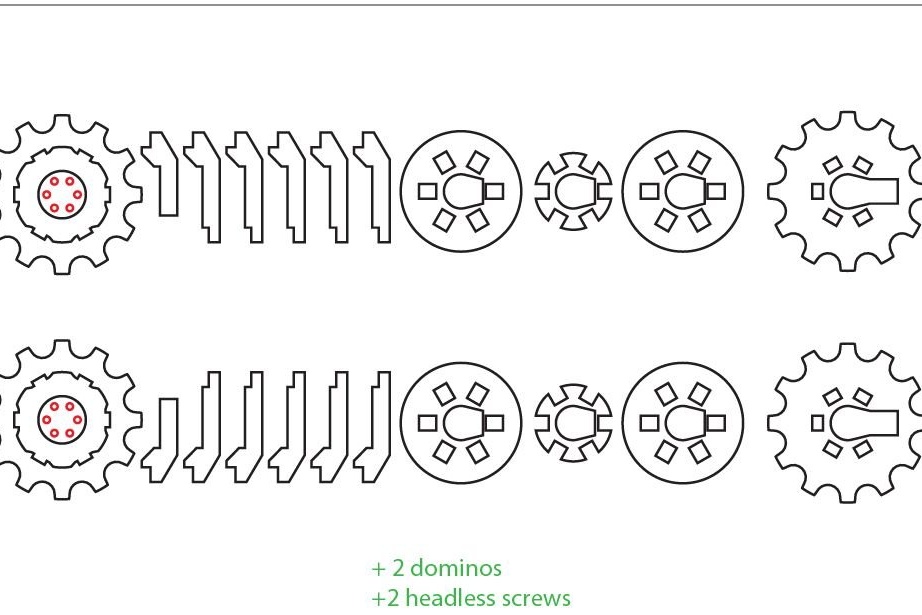
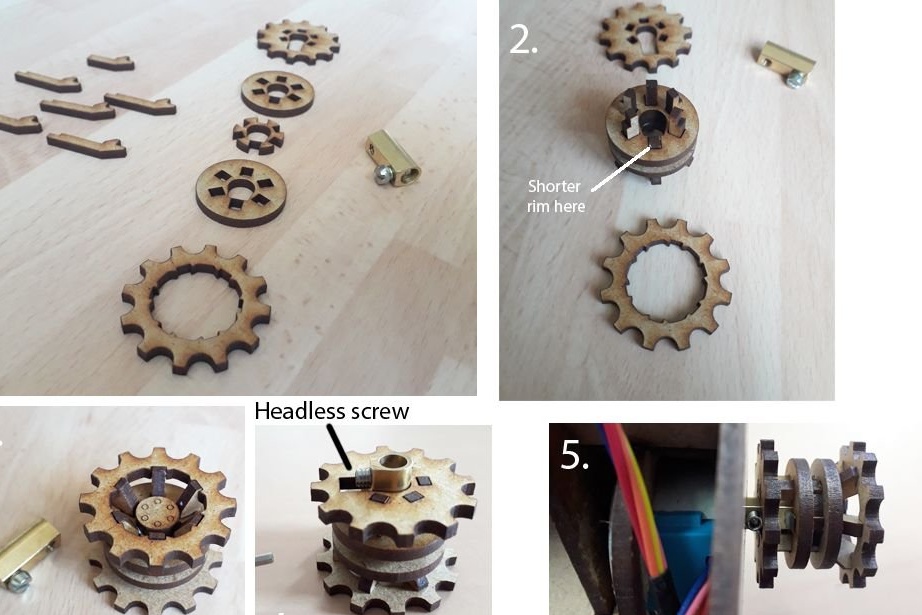
Installa tappi su ruote.

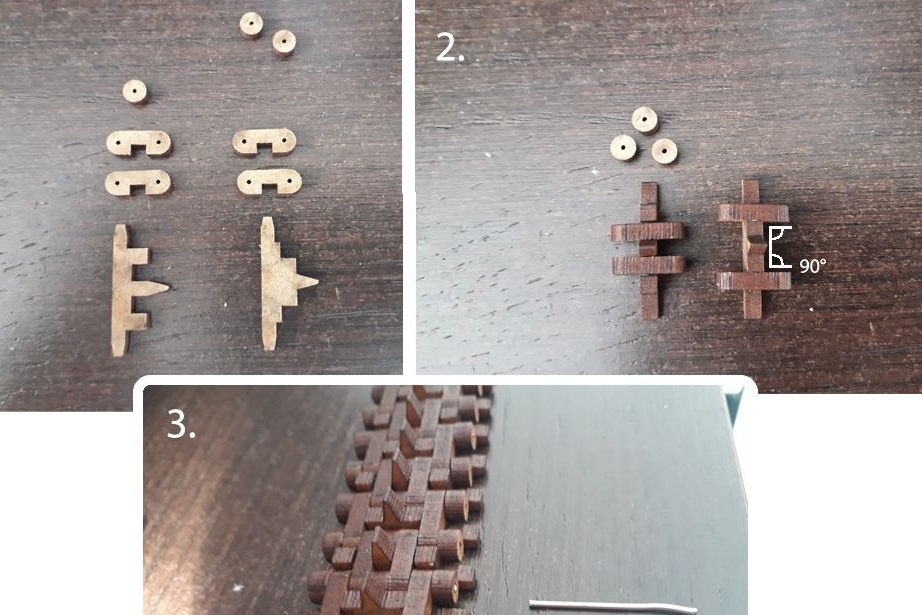
Passaggio 7: traccia
Raccoglie tracce di bruco. I binari sono fissati insieme con un filo sottile. Ai lati del filo è fissato con tappi.
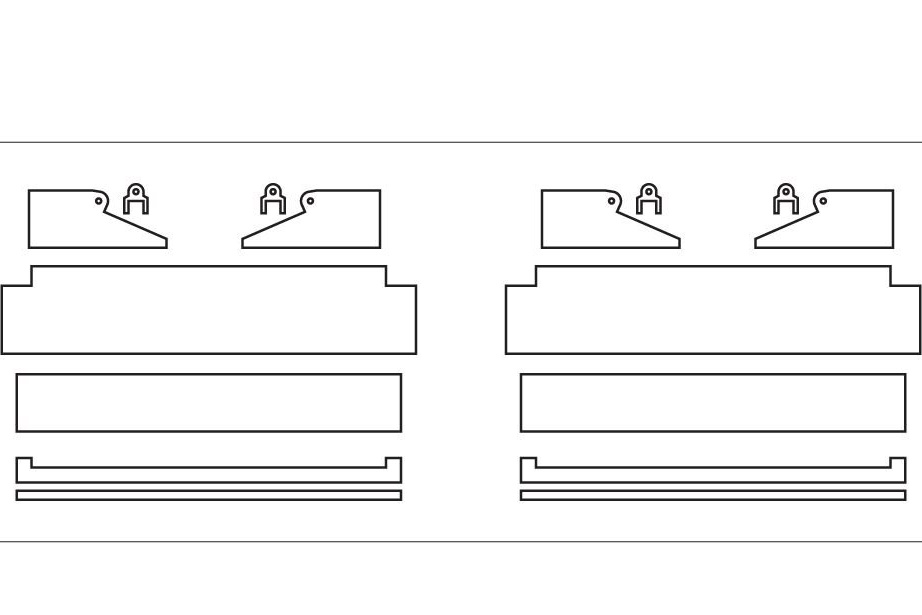
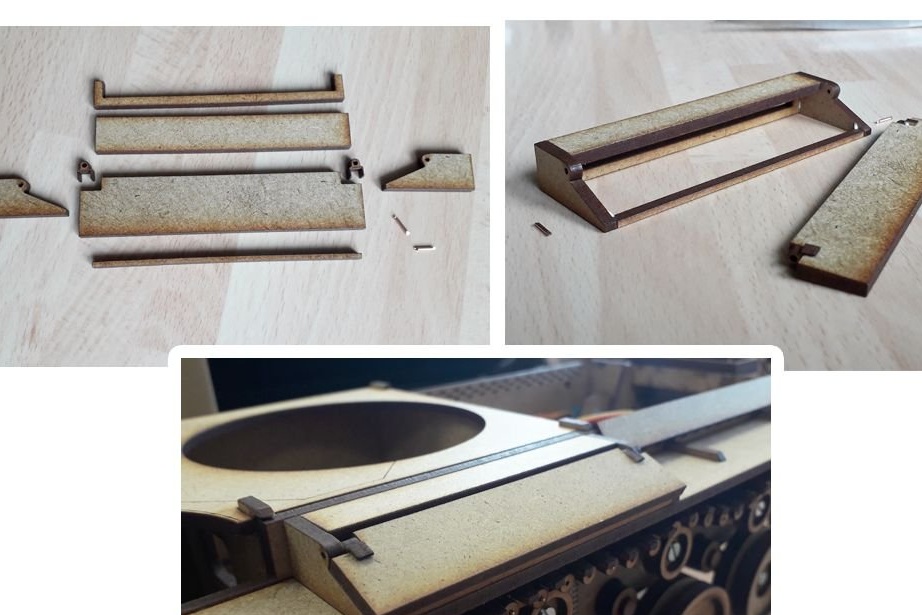
Otto: protezione dalla sporcizia e cassetto
Installa gli scudi. La parte anteriore delle alette è mobile e può essere sollevata.


Imposta il cassetto. Come anelli, vengono installati pezzi di filo.
Step Nine: The Back
Questa parte si trova dietro la torre e coprirà il tutto elettronica.
Passo dieci: la torre
Riunisce la cima della torre e le pareti laterali.
Incolla il supporto della pistola.
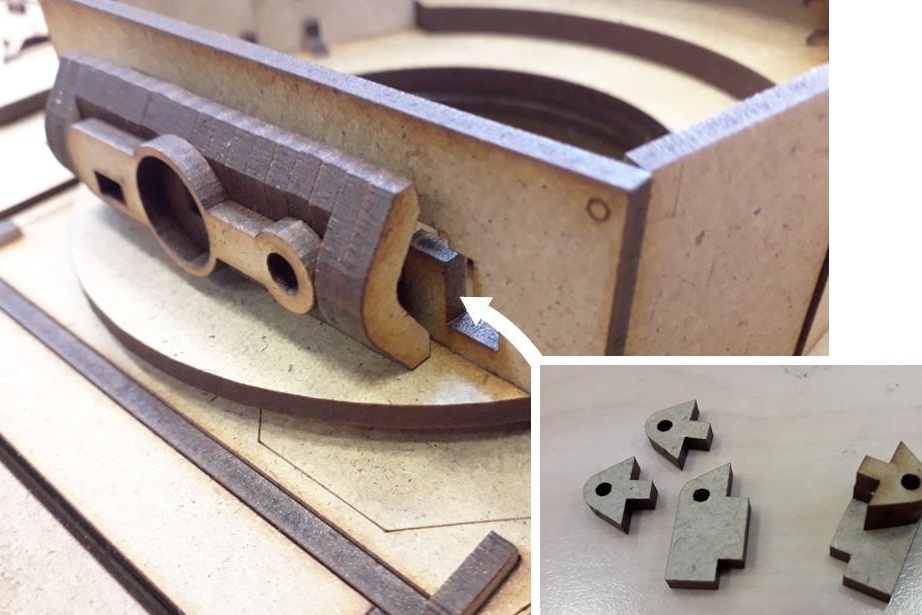
Imposta il supporto interno e il meccanismo di controllo della pistola.

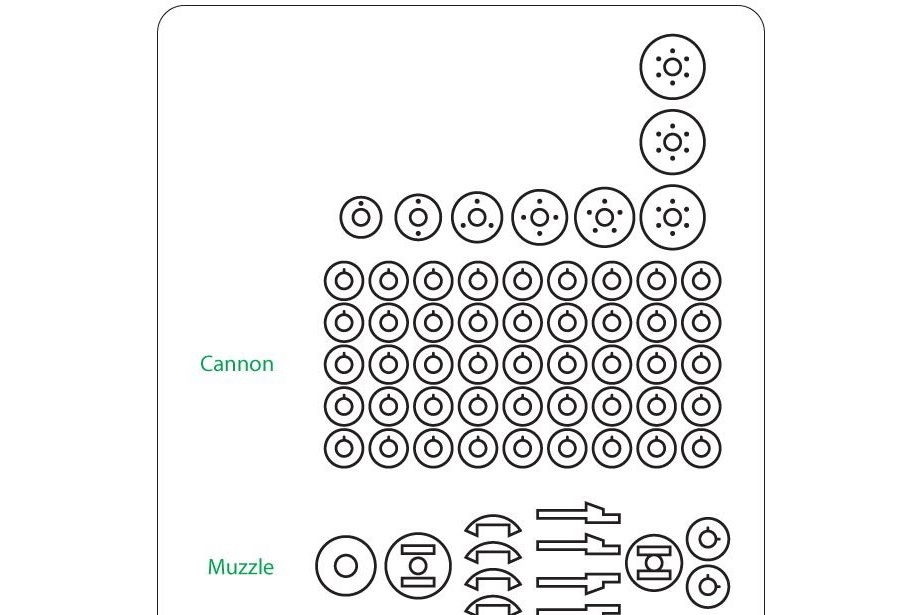
Passo undici: pistola
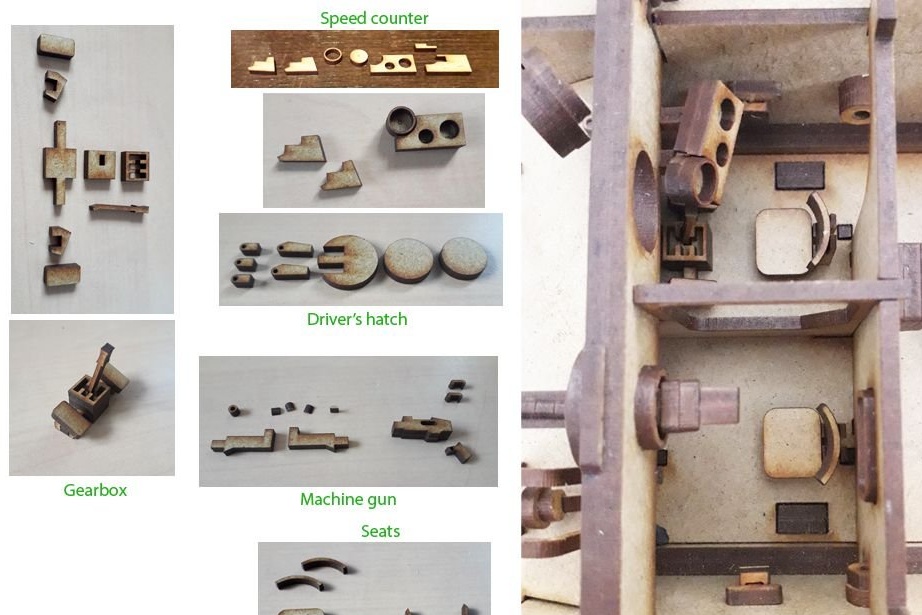
Raccoglie una pistola La pistola principale è un'asta di metallo. I dettagli rimanenti sono incisi su di esso.

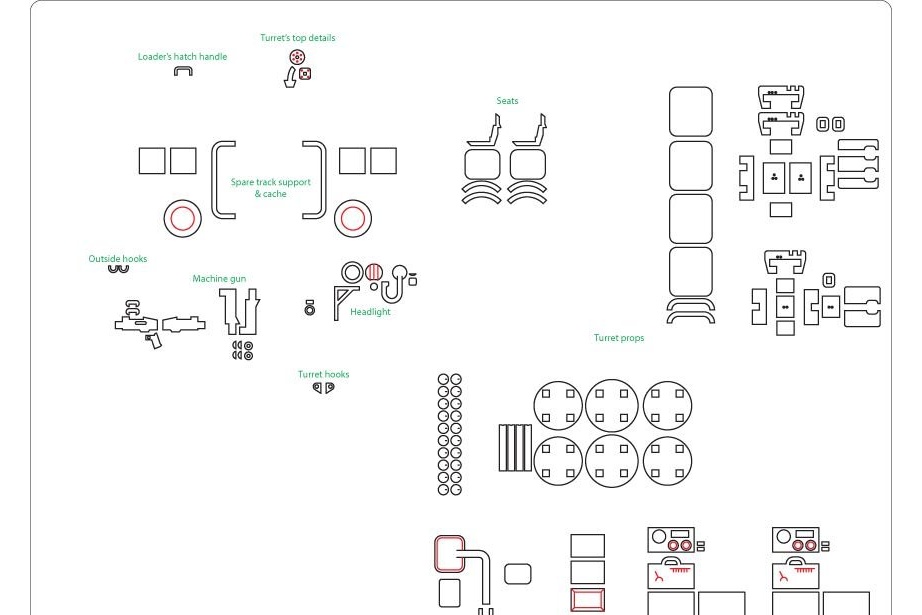
Dodici passi: piccoli dettagli
Protegge piccole parti del serbatoio.
All'interno, sul lato sinistro, c'è un sedile e una mitragliatrice, fuori dalla canna di una mitragliatrice.
Sul sedile del conducente: sedile, leve di comando e pedali, tetto apribile.
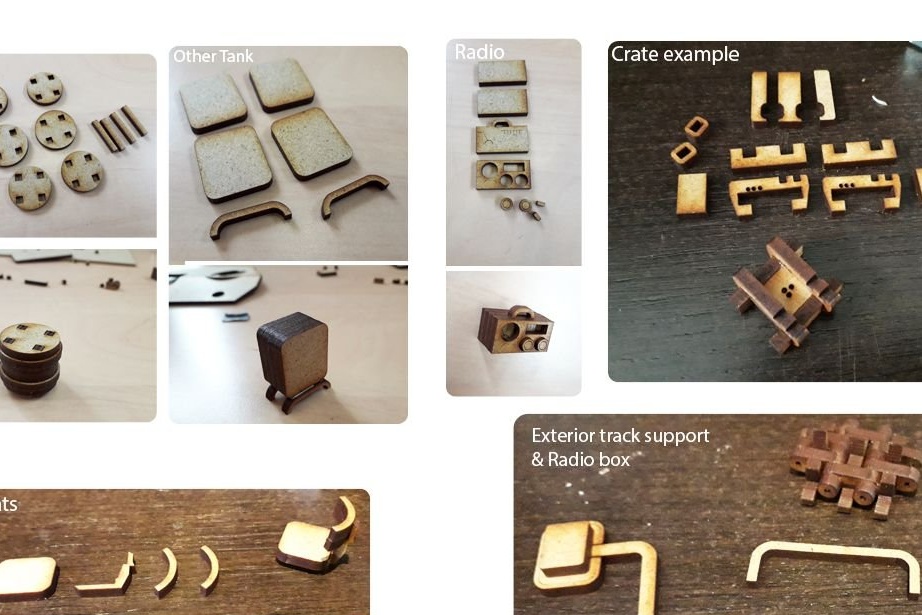
Esterno: ganci, fari, scatole, munizioni, fune metallica, ecc.
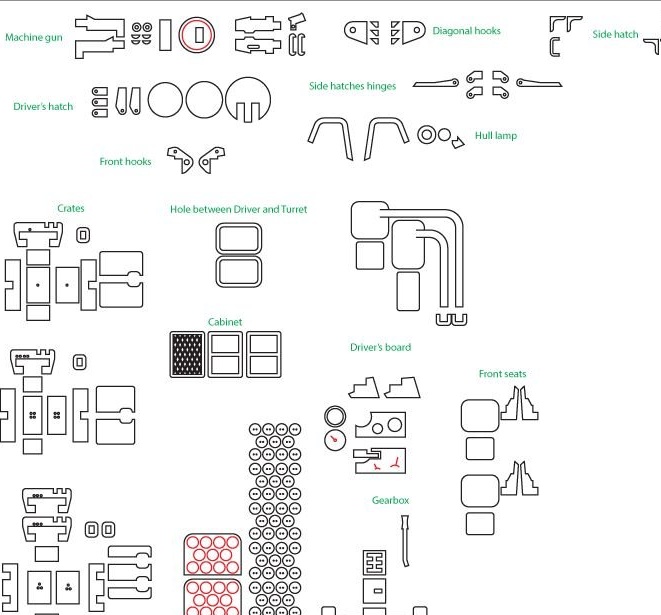

Un serbatoio sott'acqua è fissato alla torre, un walkie-talkie all'interno della torre.

Step 13: Elettronica
Installa i motori. Esegue l'installazione della parte elettronica secondo lo schema.
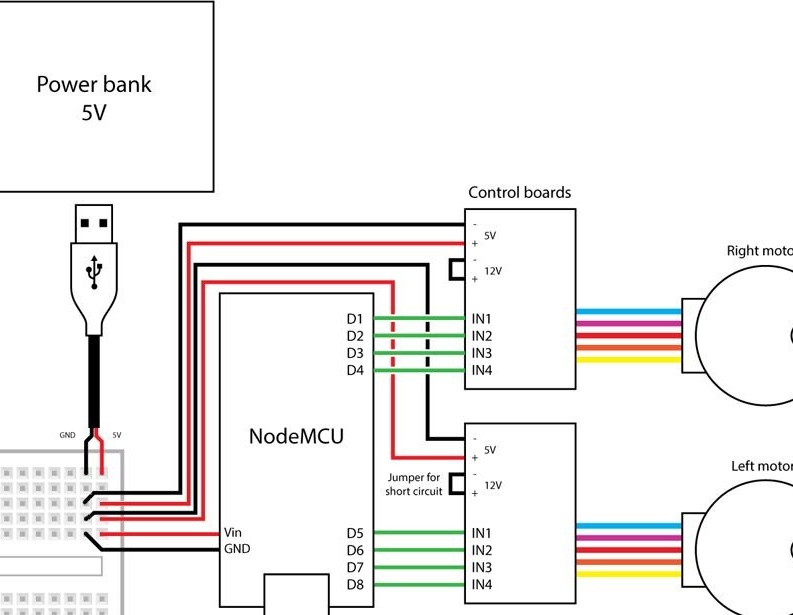

Per il controllo wireless, ho scelto il controller NodeMCU. Il modello è controllato tramite NodeMCU e l'applicazione Blynk (disponibile su Android / iOS). Questa app fornisce un HUD completamente personalizzabile per il controllo da qualsiasi Arduino o telefono iOS tramite WiFi.
Quindi, dopo aver installato l'applicazione, la prima cosa da fare è creare un account.
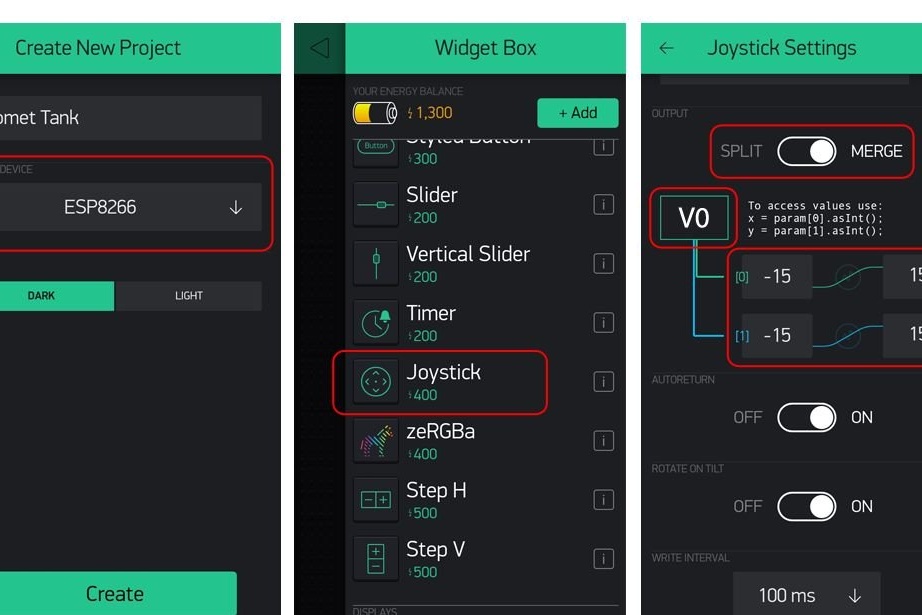
Crea un nuovo progetto e assegna ESP8266 (chip NodeMCU) come microcontrollore e imposta la modalità WiFi.
Non appena vedi per la prima volta il tuo HUD, crea un joystick. Invia le informazioni del joystick al pin virtuale V0 del nodo.
Dopo aver creato un joystick, fai clic su di esso per aprire le sue impostazioni. Nelle posizioni X e Y, impostare l'intervallo da -15 a 15.
Installa librerie.
Innanzitutto, scarica la libreria Stepper2 qui: https://github.com/udivankin/Stepper2
Questa libreria è una buona opzione per motori passo-passo economici, come quello utilizzato dal master. Gestisce meglio le fasi del motore e fornisce una coppia migliore. Dopo aver scaricato il file .zip, installalo dal software Arduino: Sketch> Includi libreria> Aggiungi libreria .ZIP ... e selezionalo.
Quindi, se non hai mai eseguito il flashing di NodeMCU in precedenza, è necessario un computer per riconoscerlo. L'IDE Arduino ha un board manager su cui sono installati i driver corretti.
Copia la seguente riga:
https://arduino.esp8266.com/stable/package_esp8266com_index.jsonApri le impostazioni e incollale negli URL. Salvare le impostazioni e andare al gestore controller in Strumenti> Scheda> Gestione schede. La scheda ESP8266 deve essere presente alla fine dell'elenco. La procedura guidata ha scelto la versione 2.5.0 con l'IDE in 1.8.9.
È inoltre necessaria la libreria Blynk, che si trova in Schizzo> Includi libreria> Gestisci librerie ... e quindi trova Blynk nel campo di ricerca.
Vai alle impostazioni del progetto e invia un token al tuo indirizzo, che è una stringa di grandi dimensioni che consente al telefono di riconoscere NodeMCU quando è acceso. Copia il token dalla posta ricevuta di recente e incollalo nell'array auth.
Ora puoi installare il firmware.
Comet.ino
Tutto è pronto, ora puoi goderti il tuo lavoro.