


Recentemente portato suocero, il padre di alcuni dei miei nipoti, dentro il garage un'auto elettrica per bambini piuttosto battuta (di seguito denominata la macchina), in modo da padroneggiare le regole del traffico più giovani. È un uomo d'armi, ha avviato la meccanica e un elettricista, ecco perché si è rivolto a me - quando si inizia, c'è un brusco strappo, la piccola contrazione della testa. Sapeva che alcuni anni fa ho installato gli avviatori statici in auto, che venivano noleggiate nei parchi nei fine settimana (e non solo vicino a tutti i principali negozi), i bambini sono andati a fare un giro in macchina e mi hanno colpito. Bene, le migliori pratiche sono rimaste, perché no.
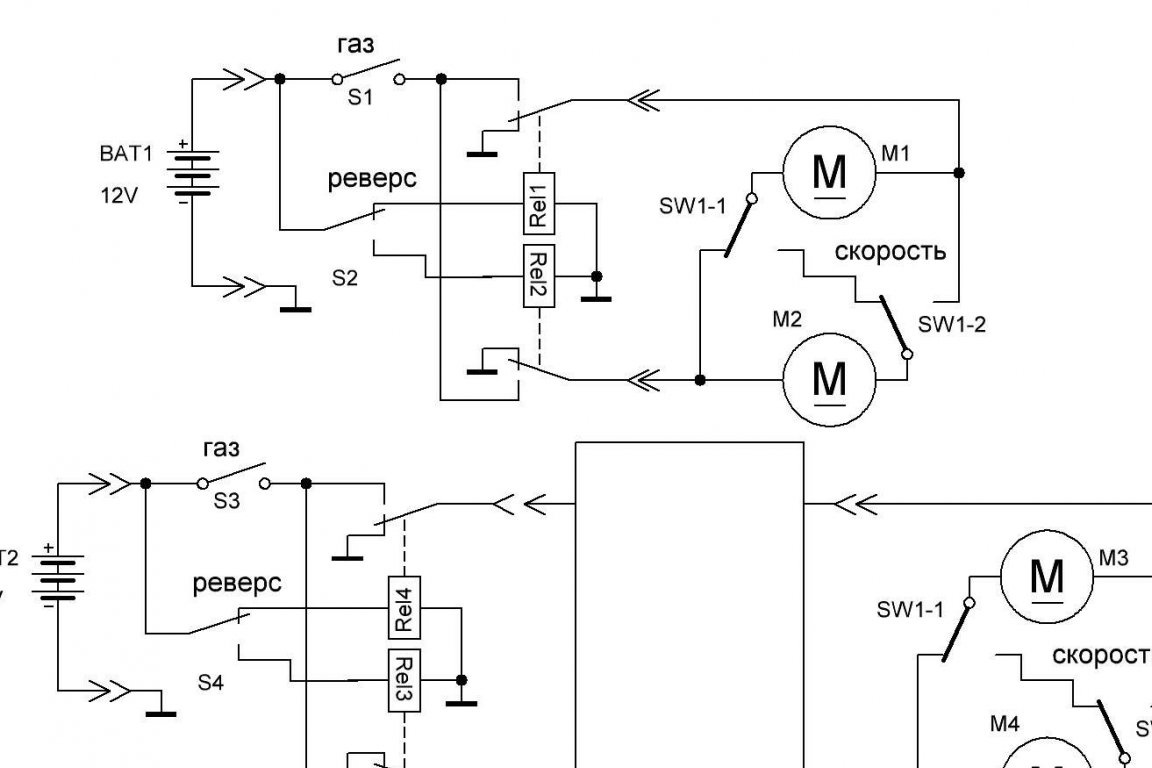
Una macchina di questa classe ha:
- "gas", pedale, interruttore senza un accenno di regolazione;
- "box", l'interruttore è veloce-lento, accende entrambi i motori in parallelo (veloce) o in sequenza (lentamente);
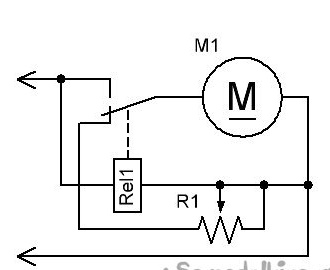
- "reverse", commuta la polarità della tensione fornita ai motori. E questo è tutto. Anche le auto controllate dal bluetooth hanno lo stesso schema a blocchi. Ci sono opzioni per l'uso di un relè per PWM, ma come dice un film: "Questo non è serio!" Quindi, uno schema molto semplificato appare così. Nelle vicinanze si trova l'inclusione del nostro modulo.
Qual è il riempimento del nostro modulo? Questo è un interruttore a transistor di potenza (è troppo complicato con un tiristore a corrente continua) controllato da un generatore PWM, oltre a un relè di tempo (RV) che, dopo aver accelerato (5 ... 10 secondi dopo l'avvio), contatta il relè di potenza con un interruttore di cortocircuito per ridurre le perdite e lo scarico la chiave.
Il principio di funzionamento del generatore PWM è spiegato in questo diagramma.
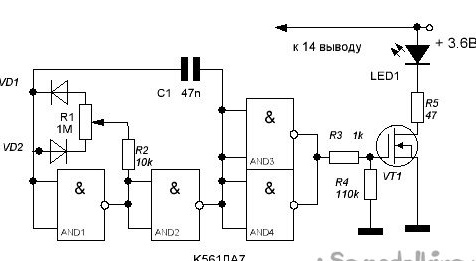
La catena di frequenza è composta da C1 e R1 e il rapporto è log. 1 e 0 - duty cycle - dalla posizione del cursore R1, più precisamente, dal rapporto tra le resistenze delle parti superiore e inferiore della resistenza. Queste parti controllano la velocità di carica o scarica del condensatore, a seconda del diodo. Quando sono uguali, la durata del bagliore e "non bagliore" del LED sarà uguale. In una delle posizioni estreme del cursore ci sarà un lungo bagliore con un breve tempo di estinzione, nell'altro - brevi lampi.
Ma il diagramma mostrato funziona bene con la regolazione manuale, per il nostro obiettivo - soft start - è meglio usare il timer NE555 (di seguito semplicemente un timer), "affilato" appositamente per tali modalità. Analogo domestico di KR1006VI1, altri analoghi: non ha senso fornire una descrizione completa, ci sono libri di riferimento, ma l'essenza è che ha un input “Control” (CTRL), microcircuito a 5 gambe. Ecco una descrizione da Radiokota:
…
Aggiungerò da me stesso che se la tensione sulla 5a gamba è uguale o maggiore della tensione di alimentazione, la generazione si interrompe, in uscita, la chiave è completamente aperta (che è ciò di cui abbiamo bisogno).
Consideriamo schemi reali.
Il primissimo circuito seriale progettato e prodotto su transistor bipolari. (La parola "seriale" significa che ne ho realizzati più di 10 pezzi).
Caratteristiche di questo circuito:
- un gruppo di potenti transistor (KT819, quindi KT863) - cattivo, occupa molto spazio, riscalda;
- un gruppo di resistenze di allineamento - pessime, occupano spazio, forte riscaldamento;
- un relè temporale su un tiristore - un grande condensatore occupa spazio;
- cuffie, simulatore di overclocking del suono - buono, ma occupa spazio.
Inoltre, il principale schema di produzione. Lo considereremo in modo più dettagliato.
Fornisce un avviamento regolare, la retromarcia è a scatti. Per risparmiare denaro, il cliente ha accettato. Il simulatore del suono è stato abbandonato. I transistor a effetto di campo 55N06, scaricati dalla Cina, sono stati respinti del 20%, ma i restanti hanno funzionato così bene (piccole perdite e riscaldamento) che non hanno immediatamente acceso il PB, ma hanno rifiutato (le parti K1, VD4, VT2, C5 e R5 non sono state installate). La velocità di accelerazione è determinata dal condensatore C3 (da 1000,0 a 4700,0 μF) e dalla resistenza R1, il valore nominale viene selezionato sperimentalmente. Non è difficile ottenere una limitazione o la capacità di regolare la velocità; è necessario collegare in parallelo C3 una variabile o un resistore di sintonia con un valore di circa 10 ... 20 kOhm, il cui dispositivo di scorrimento è collegato al 5o piede del timer.
Quando ci si sposta all'indietro, i punti più e meno cambiano posizione, l'alimentazione 555 viene interrotta dal diodo VD2. La corrente del motore passa attraverso un diodo incorporato nel lavoro sul campo VT1, in cui la corrente consentita è la stessa di quella della struttura principale. Il resistore R8 collegato in serie con il diodo di smorzamento VD3 ha scarso effetto sulle sue proprietà di smorzamento, ma lo protegge dai sovraccarichi durante la retromarcia. Il timer qui viene attivato secondo uno schema atipico, ci sono meno dettagli, le funzioni sono le stesse. L'alimentazione del timer viene fornita attraverso il resistore R3, non solo per migliorare il filtro dell'alimentazione, ma principalmente per creare un eccesso di tensione sulla 5a gamba oltre la tensione del timer per "collegarlo" nella posizione desiderata. Il suo valore quando si usano analoghi del timer può variare notevolmente a causa del diverso consumo di corrente. Resistenza R6 e diodi VD2 e VD4 - per scaricare i condensatori di impostazione del tempo C3 e C5 quando l'alimentazione è spenta. Per eliminare la pausa all'inizio dell'avvio, tra meno C3 e meno l'alimentazione, è possibile installare una resistenza di taglio dell'ordine di 1 kΩ non indicata nello schema, l'impostazione è individuale. Utilizzato nel prodotto descritto. La frequenza di generazione è determinata da C2 e R2, a questi valori di circa 300 ... 500 Hz, il simulatore del suono offre una discreta simulazione di accelerazione. Per un'accelerazione più fluida, C3 può essere aumentato a 4700,0 uF.
E un circuito con soft start in entrambe le direzioni. Caratteristiche principali:
- due interruttori a transistor 55N06;
- inclusione del timer attraverso il ponte a diodi, ad ogni connessione la potenza arriva ad essa nella corretta polarità;
- perché si nota la caduta di tensione sul diodo incorporato del fieldman inattivo, è necessario utilizzare un PB, anch'esso collegato attraverso il ponte e avente due gruppi di contatti di chiusura;
- serranda - condensatore anziché un diodo.
Puoi applicare la tensione in qualsiasi polarità: il motore accelera senza problemi nella giusta direzione.
Secondo questo schema, assembliamo il nostro prodotto.
Un po 'sulla tensione di alimentazione. Ho avuto a che fare con sistemi a 6, 12, 18 e 24 volt. 6B - obsoleto a bassa potenza, era necessario installare relè a 5 volt scarsi. 12 volt tipico, per 18 e 24 V, è necessario impostare il diodo zener sul timer (come nel primo circuito o un chip di tipo 7812). A 24 volt, il più veloce, a volte con un grande ribaltamento, un arresto accelerato richiede un freno, questo non è difficile.
Quando l'alimentazione viene spenta, il relè accorcia il motore (frenatura dinamica) attraverso un resistore di taglio del filo R1 con un valore di diverse decine di ohm, che seleziona l'intensità di frenatura.
Passiamo alla produzione.
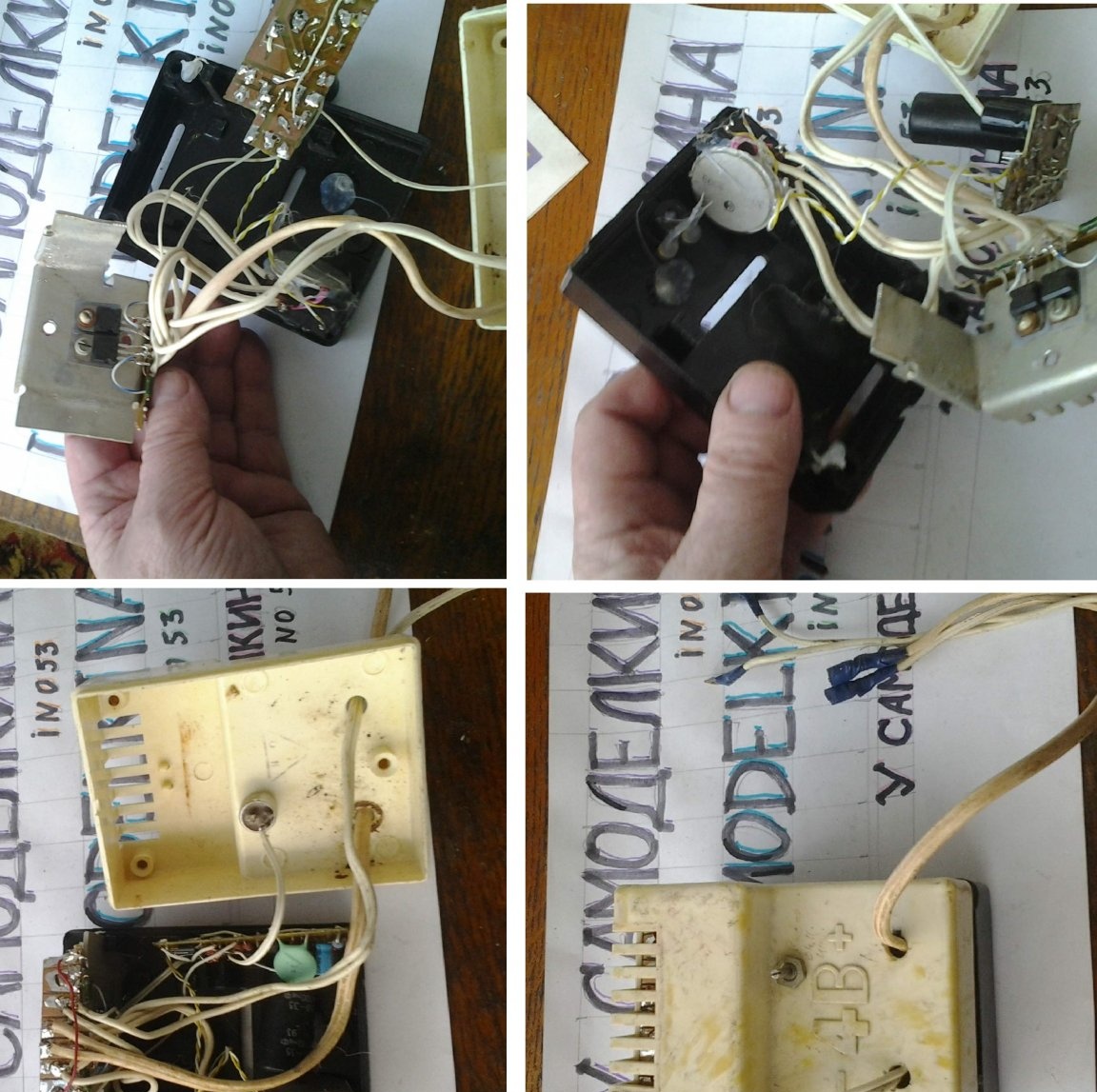
C'è un corpo Un po 'di raffinatezza nel rompere le interiora inutili.

Gli spazi vuoti per PCB vengono conservati, non è necessario avvelenare.
Puliamo, maciniamo.
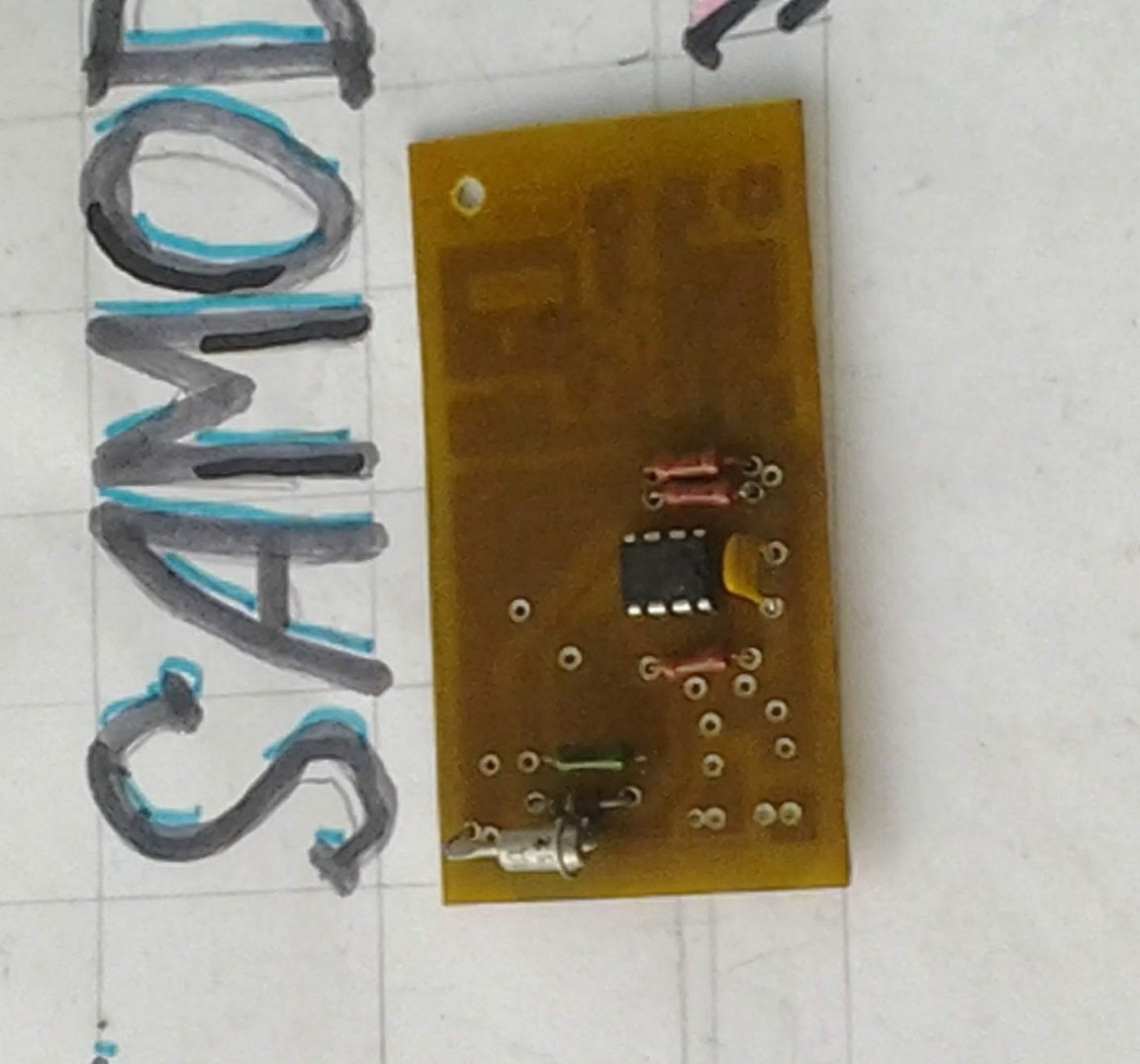
Iniziamo a riempire la scheda con i dettagli.
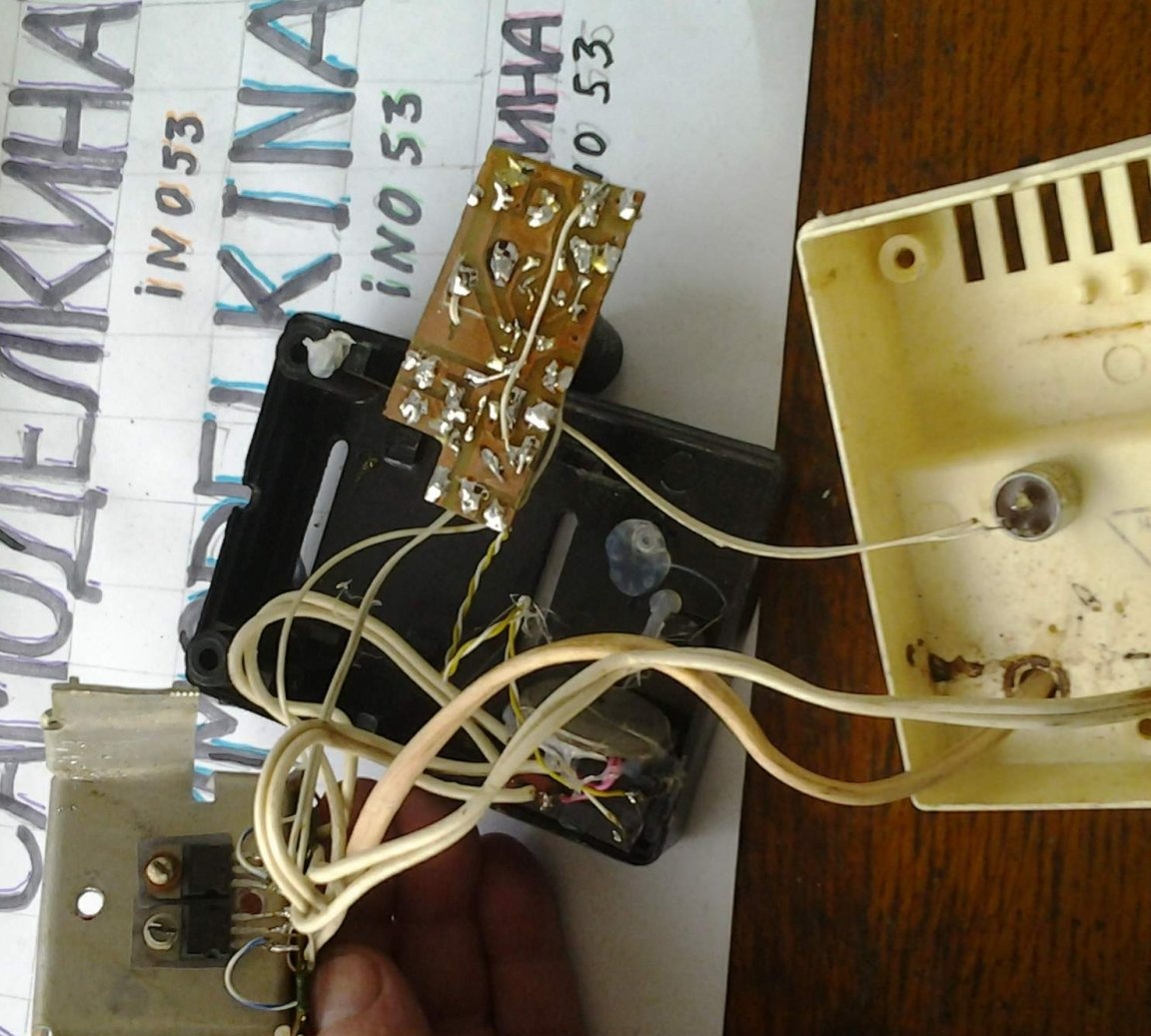
E poi inseriscilo nella custodia.
Naturalmente, non tutto è andato subito, ma con l'aiuto tu stesso sai cosa è ancora assemblato il prodotto.
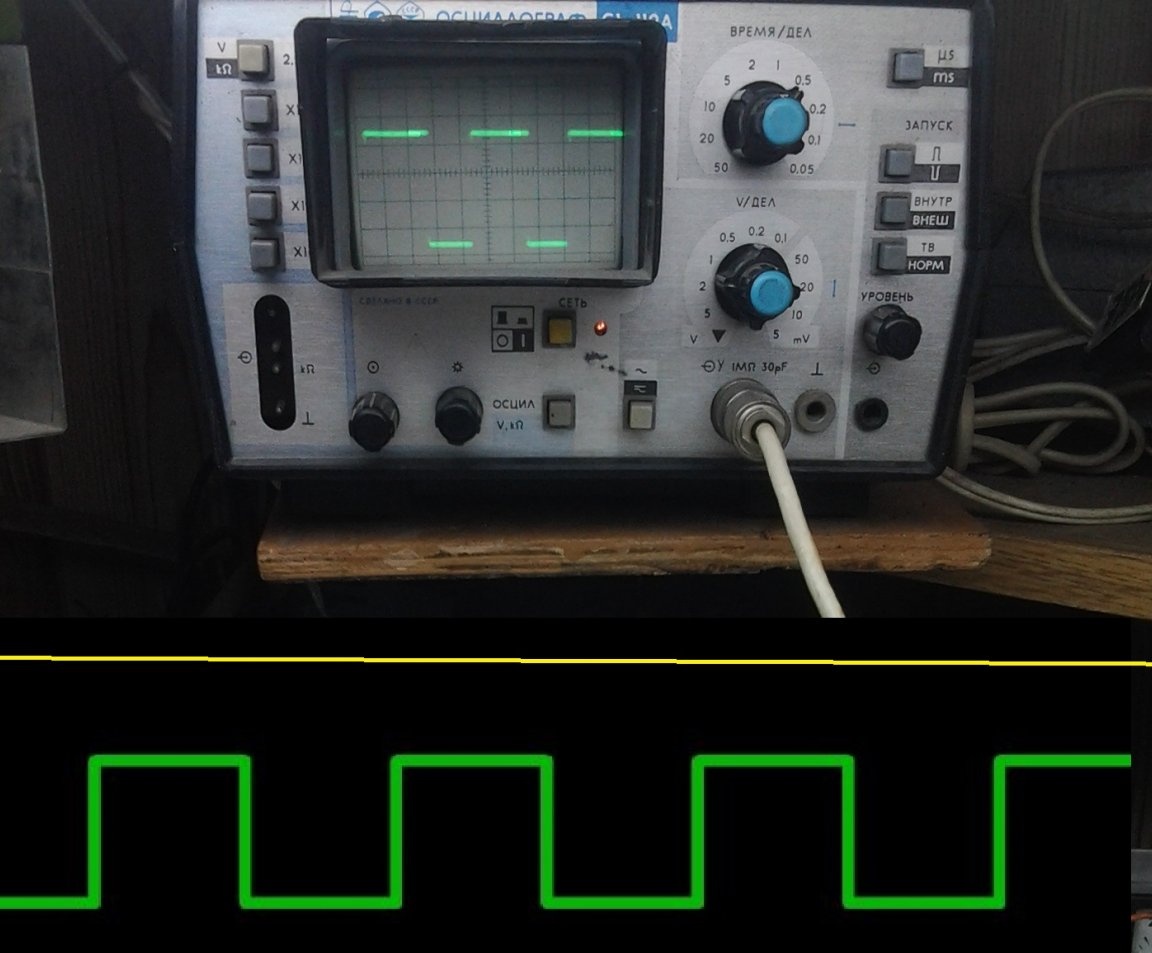
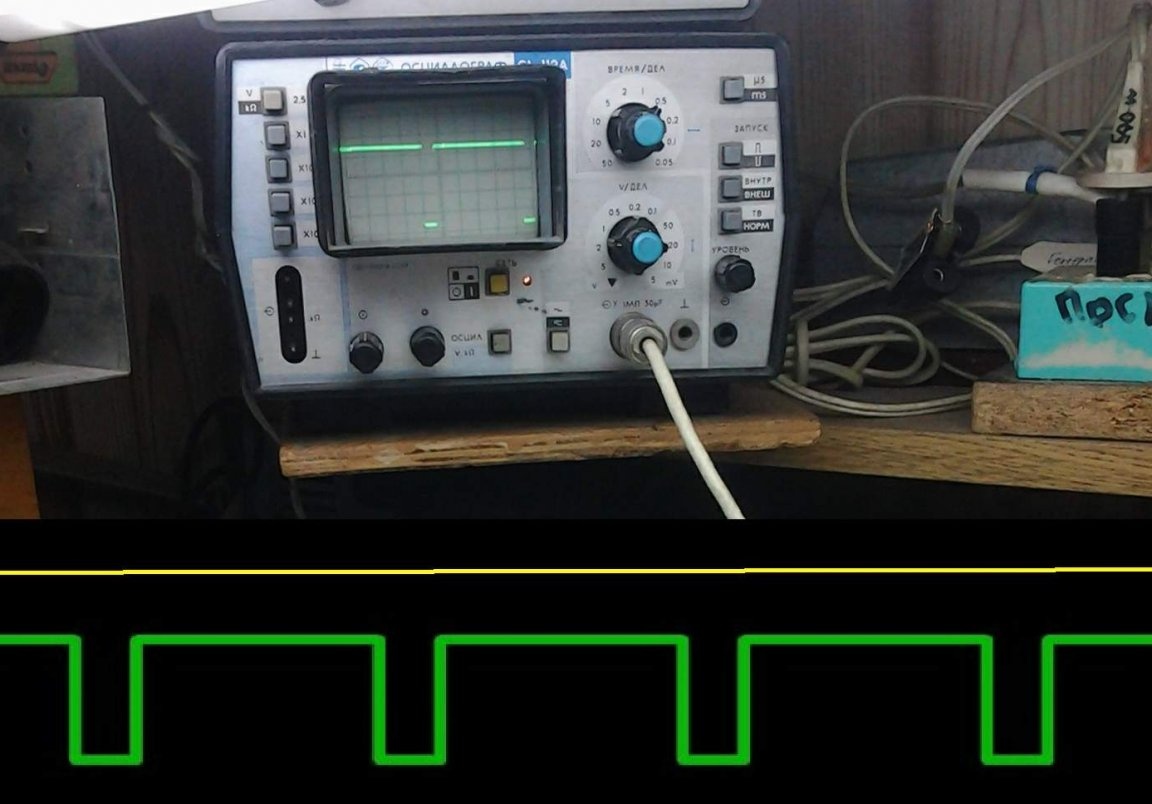
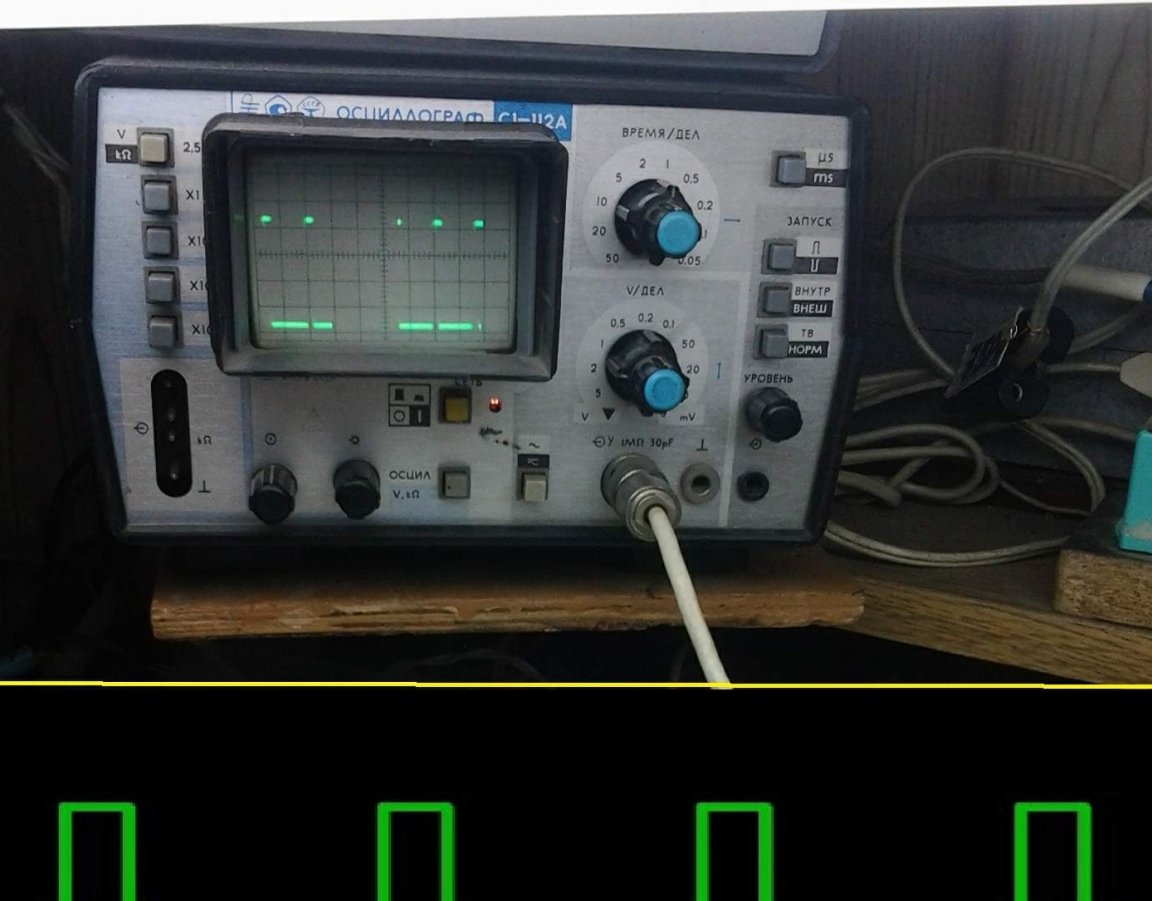
Ora scatta il video e inseriscilo.
Gli avviamenti dei motori vengono visualizzati direttamente e tramite il nostro prodotto, a soli 50 secondi.
E altro sulle opzioni per questi schemi. Se è interessante, discuteremo.
Circuito potente, 1,5 kW a 48 V (circuito incompleto).
Regolatore di alta tensione, c'è una funzione complicata.
Regolatore di avanzamento del filo nella saldatura PA.
Questo è tutto, commento.