

Quasi tutti i gatti e alcuni cani amano "cacciare" per un punto laser. Di solito il puntatore laser è nelle mani di una persona, il Maestro ha deciso di fissare il puntatore sull'animale e di controllarlo da remoto.
Strumenti e materiali:
-Modulo radio con telecomando (da un elicottero giocattolo):
Puntatore laser;
-Servoprivod;
-NPN transistor;
- Resistenza 1 kOhm;
-AAA portabatterie;
- Batteria AAA - 2 pezzi;
- Batteria AA - 6 pezzi;
Pettorina per il gatto;
-Nitka;

Fase 1: smontare l'elicottero
Per prima cosa devi smontare l'elicottero. L'elicottero ha una scheda di controllo con un modulo radio. Il master disconnette la batteria e i motori dalla scheda.





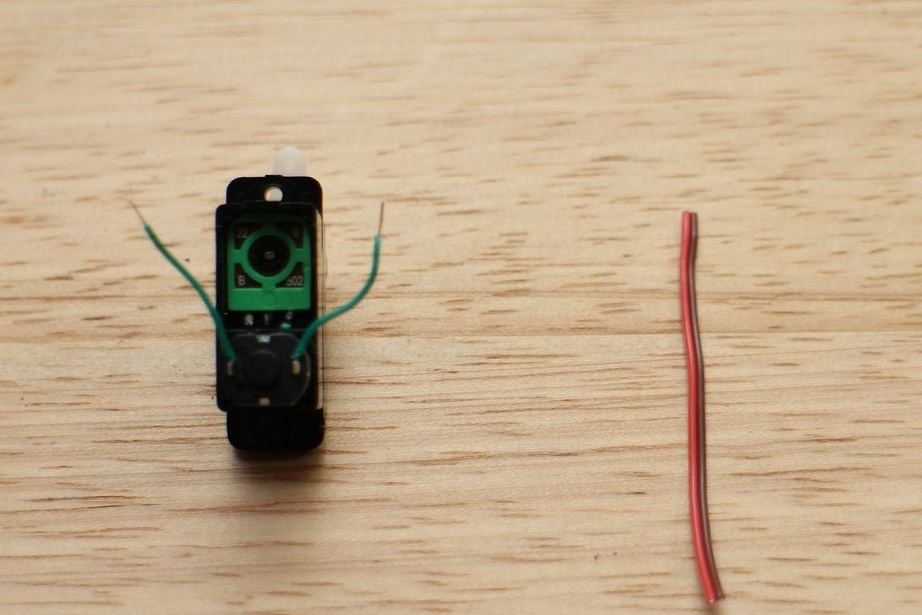
Fase due: servo
Il servo deve essere leggermente modificato. Smonta il servoazionamento e smonta i fili saldati alla scheda.
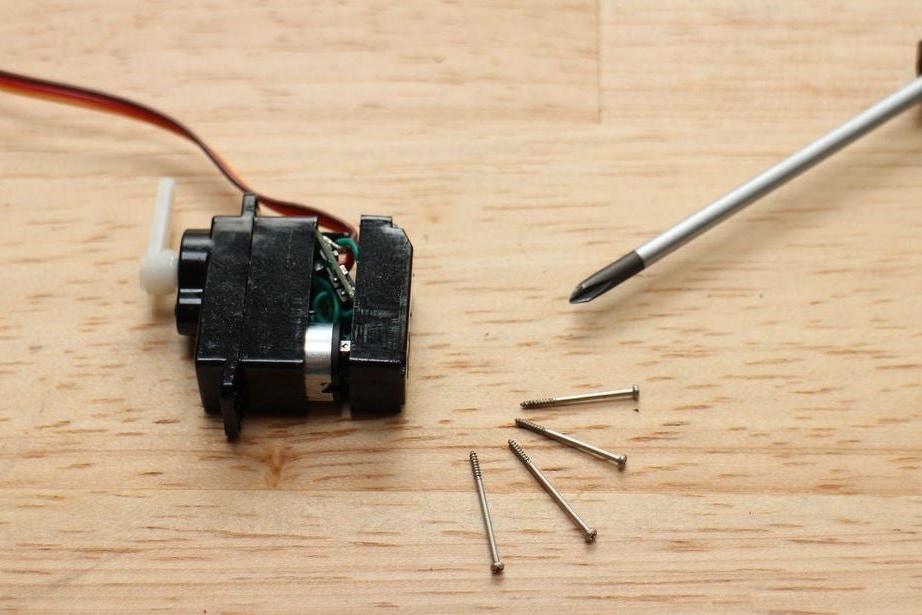
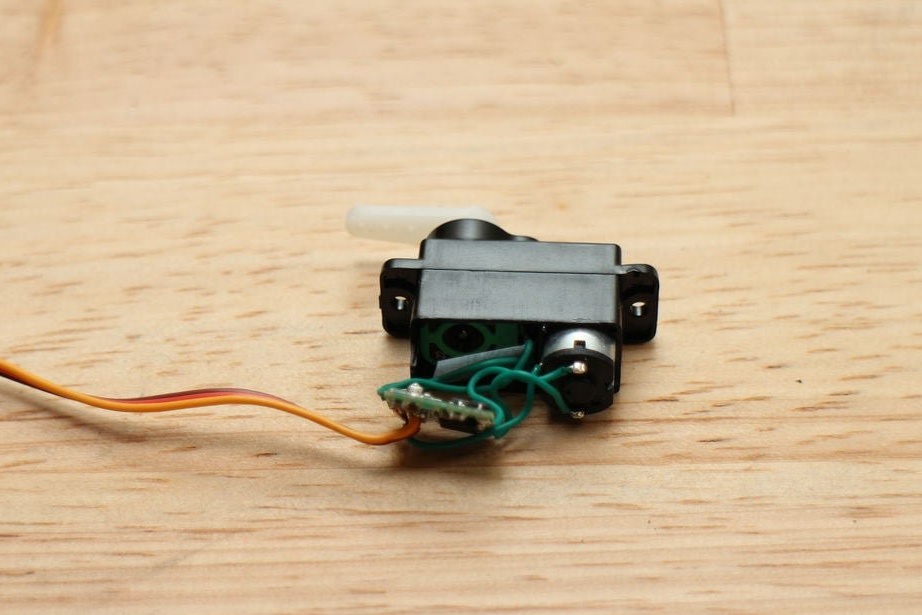
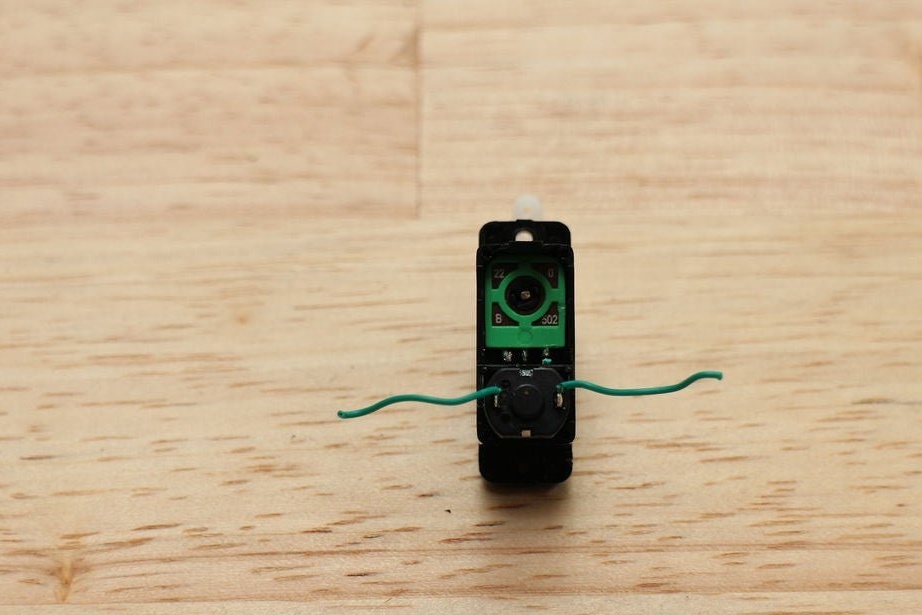
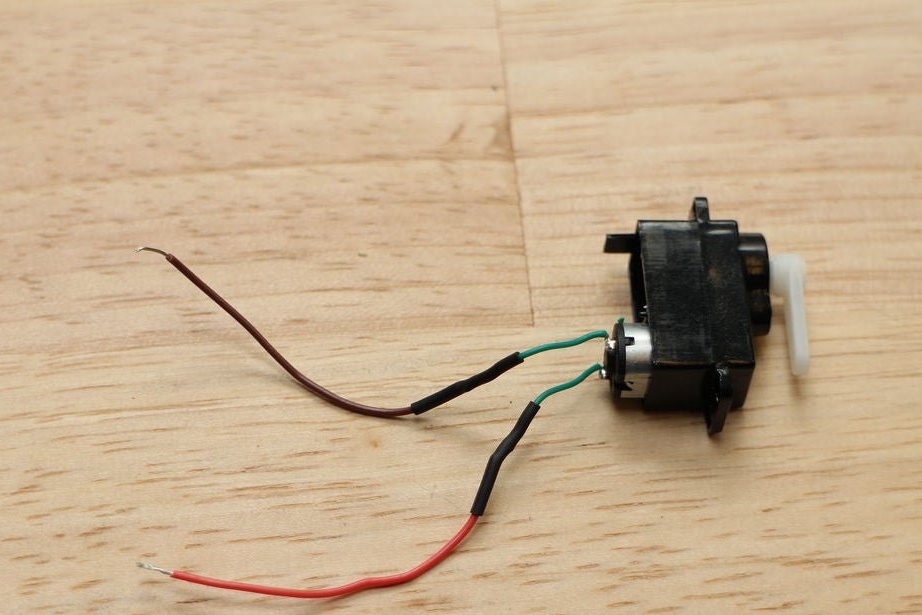
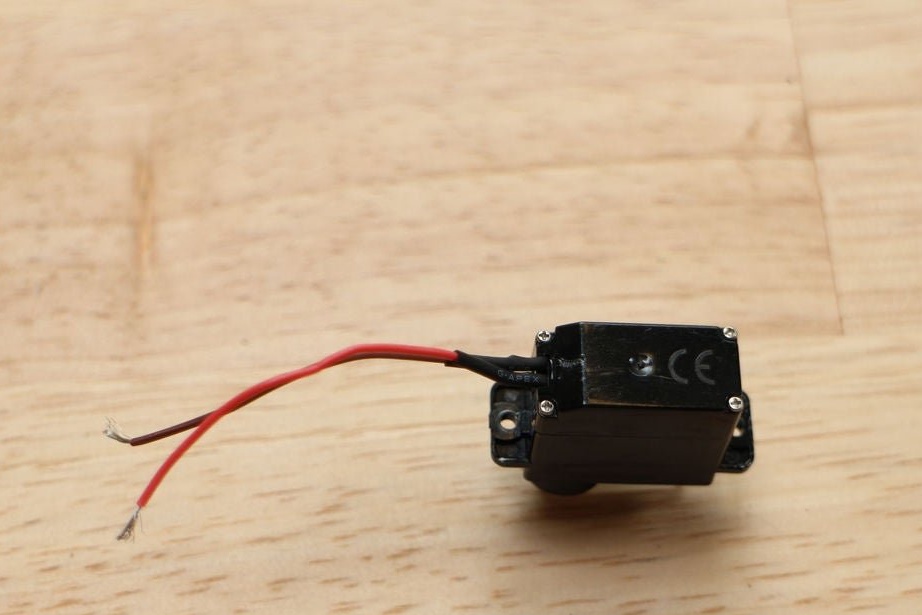
Saldare direttamente altri fili ai contatti del motore.

Fase tre: stampa 3D
Su una stampante 3D, stampa il supporto servo. Installa il servo nel supporto.
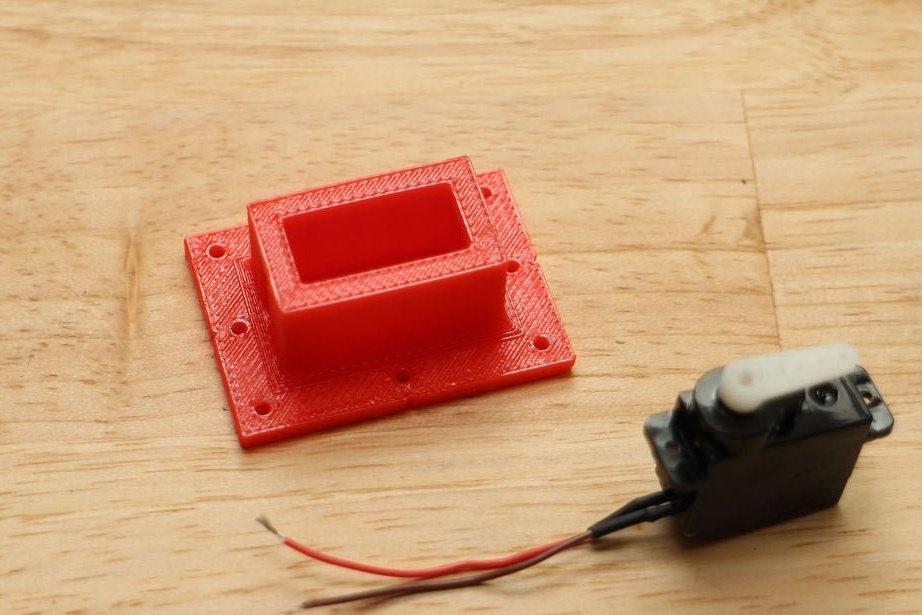
Micro Servo Mount.stl
Fase quattro: puntatore laser
Il puntatore laser è troppo ingombrante per adattarsi a un piccolo servo, quindi è necessario rimuovere il diodo e il driver dal tubo dell'alloggiamento.



Non appena il diodo è libero, rimuove la molla fissata all'estremità.
Saldare due fili sulla scheda e ponticellare il pulsante di accensione. ie posizione normale "chiusa".
Passo cinque: costruire
La batteria originale che alimentava l'elicottero era ricaricabile, ma con una capacità ridotta. Inoltre, il driver laser funziona a ~ 3 volt e la batteria LiPo produce tra 4,2 volt e 2,7 volt, il che può danneggiare il driver. Inizialmente, un servomotore richiedeva da 4,5 a 6 volt, ma il motore funzionava senza carico a tensioni molto più basse. Pertanto, il maestro ha deciso che sarebbero bastate due batterie AAA.
Il master salda i fili del pacco batteria con i contatti B + e B- sulla scheda principale. Saldare il filo anodico (rosso) dal laser al pin B +.
Saldare il filo catodico (nero) dal laser al collettore del transistor (il perno più a sinistra quando si guarda il lato piatto).
Saldare una resistenza da 1K tra il pad L + e la base del transistor (pin centrale).
Saldare l'uscita dell'emettitore del transistor (l'uscita più a destra, se si guarda il lato piatto) alla scheda L.
Saldare i fili del motore ai contatti M + e M-, rispettivamente. La polarità non ha importanza.
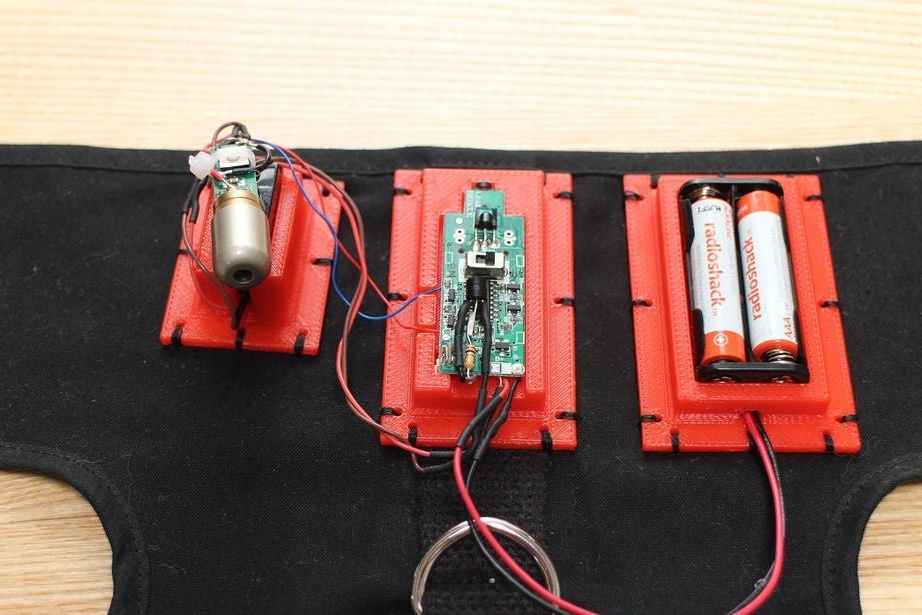
Su una prestampa 3D, stampa i dettagli e installa la scheda e la batteria.
AAA Battery Mount.stl
RC Electronics Mount.stl
Passaggio 6: addestrare il gatto
Se indossi immediatamente un'imbracatura per gatti, ovviamente non sarà felice. Questa imbracatura viene utilizzata, insieme a un guinzaglio, per camminare gatti e cani di piccola taglia. Il sito Web del produttore afferma che è necessario abituare gradualmente l'animale a indossare un'imbracatura, vestirsi per diversi minuti e aumentare gradualmente il tempo.
Dopo aver abituato l'animale a indossare un'imbracatura, il padrone fissa il dispositivo su di esso e lo mette sul gatto.


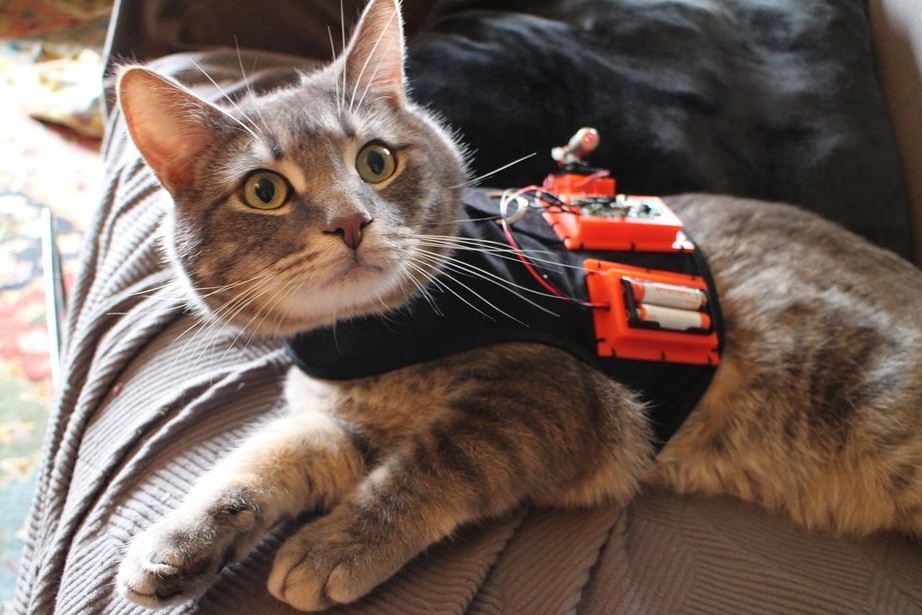
È tutto pronto. È possibile controllare il laser utilizzando il joystick o installare il laser in un punto.


Di seguito è possibile guardare un video con un esempio dell'assemblaggio e del funzionamento del dispositivo.