
Di recente ho costruito dozzine di robot, per lo più ispirati alle meraviglie della robotica BEAM. Se non hai familiarità con questa tecnologia, BEAM è un metodo speciale per costruire robot con enfasi B - biologia, E - elettronica (elettronica), A - estetica (estetica) e M - meccanica (meccanica). Questo è l'acronimo BEAM. Ciò che separa questa tecnologia da altri approcci è l'uso della sola energia di radiazione per l'alimentazione (principalmente energia solare), lo smaltimento di vari materiali (riutilizzo) e il minimalismo. Anche se ho adottato questi principi, i miei robot non erano esattamente nello spirito di BEAM (erano alimentati da una batteria).
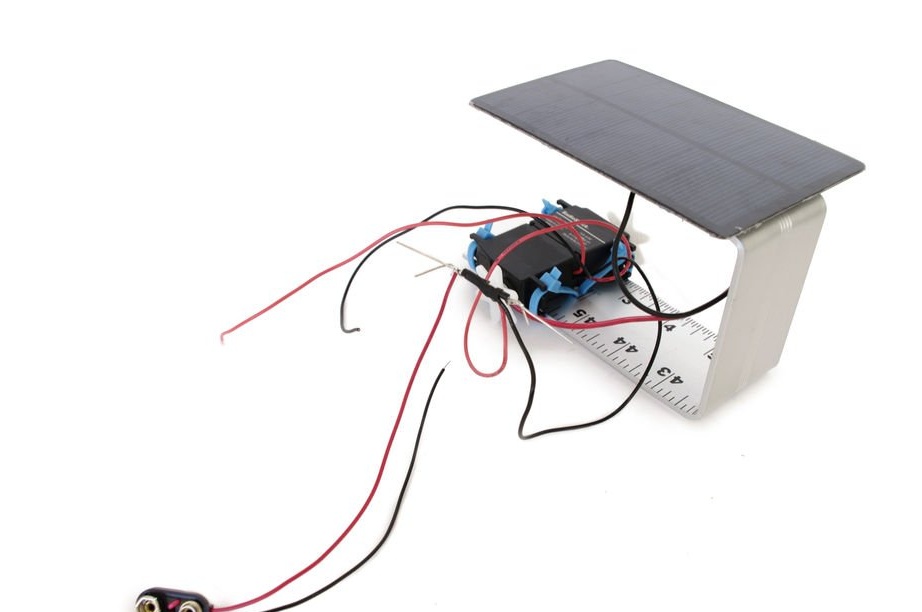
Dato che la robotica BEAM mi ha ispirato sul serio, volevo realizzare un robot a energia solare. Ma invece di creare semplicemente un robot BEAM, ho deciso di integrare un pannello solare nel robot del mio solito stile. Invece di essere completamente alimentato dal sole, ho deciso di costruire batterie ricaricabili. Cioè, il mio robot può essere alimentato da una batteria o da un pannello solare, a seconda della fonte di alimentazione attualmente più potente. Il pannello solare carica anche le batterie quando la luce del sole colpisce. Ciò consente al robot di muoversi sia nella luce che nell'ombra.
Penso che questo approccio combini con successo due stili e questo è un esperimento interessante nella costruzione di robot.
Passaggio 1: materiali
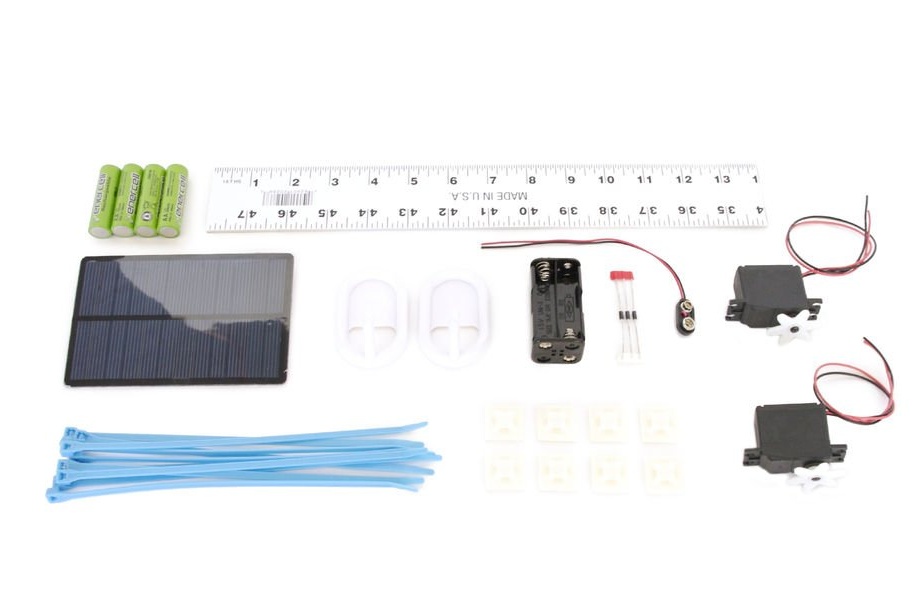
Avrai bisogno di:
(x1) Pannello solare
(x2) Servomotori standard
(x3) Diodi Schottky 1N5817 - NTE578 equivalente
(x1) Batteria da 9 V.
(x8) Batterie AA ricaricabili
(x1) 8 batterie AA
(x12) Base per morsetti
(x1) Righello (30-50 cm)
(x2) Ganci adesivi a parete
(x1) Morsetti di plastica
(x1) Guaina termorestringente
Passaggio 2: modificare il servo

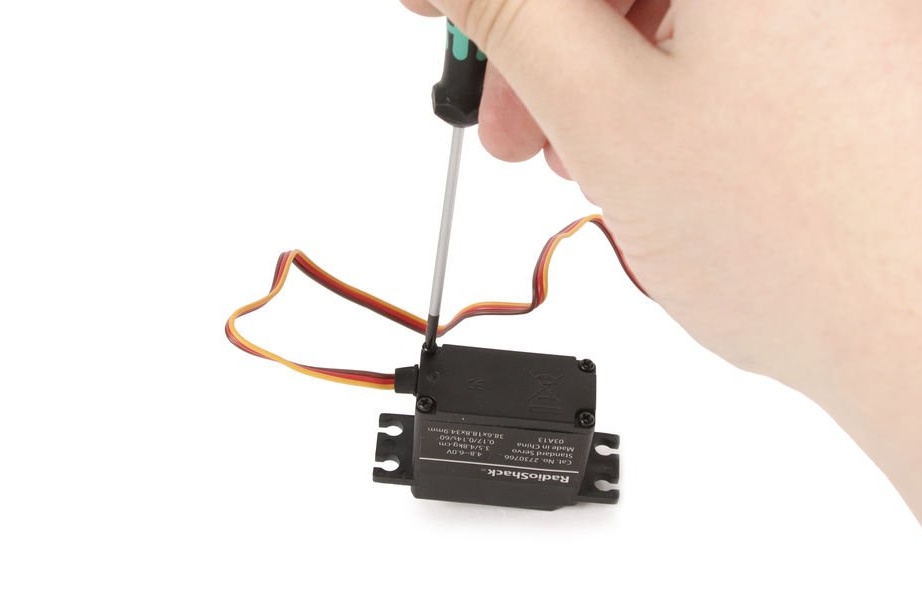
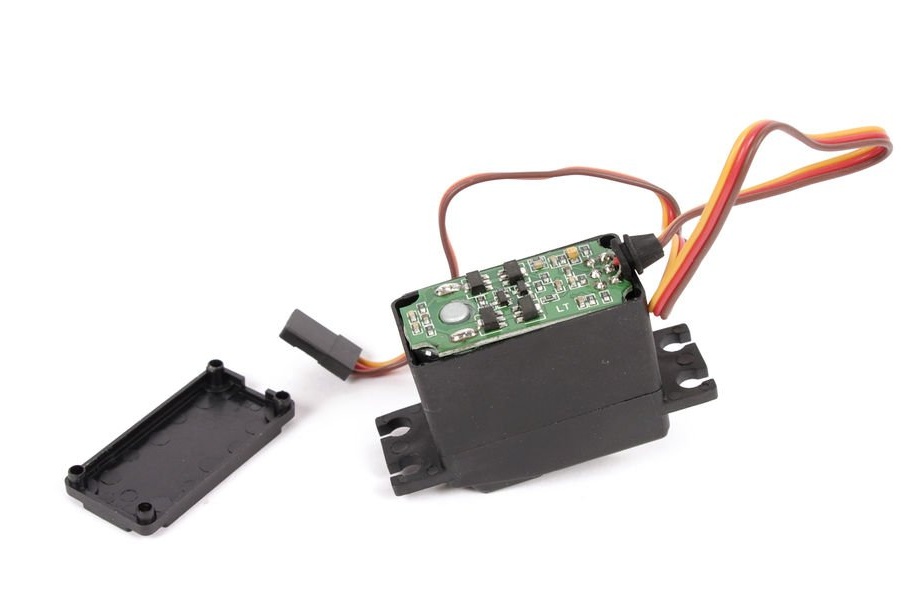
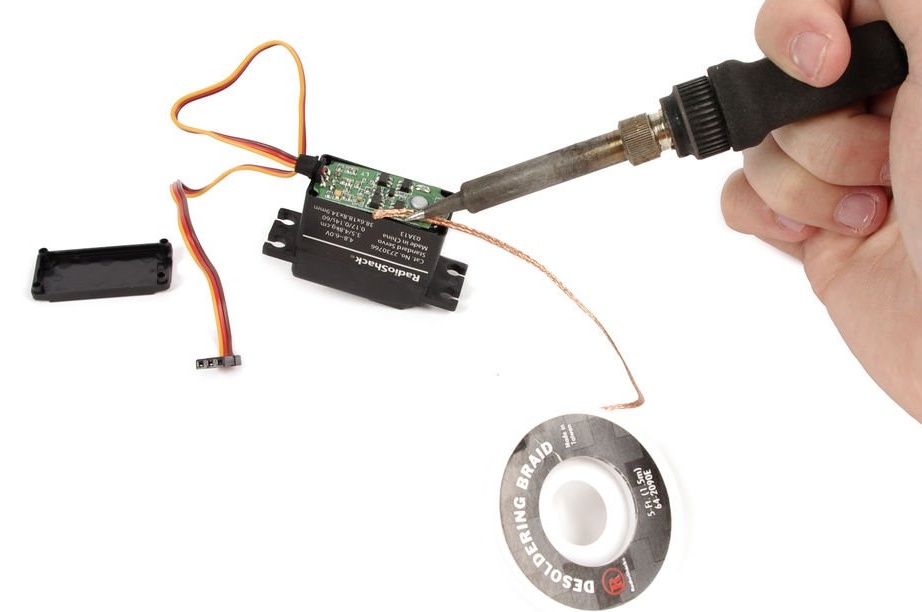
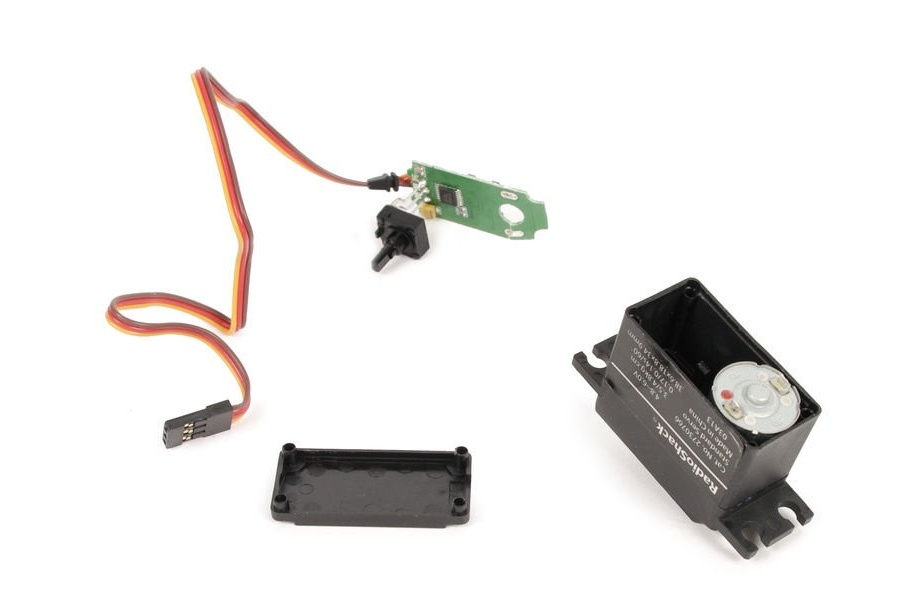




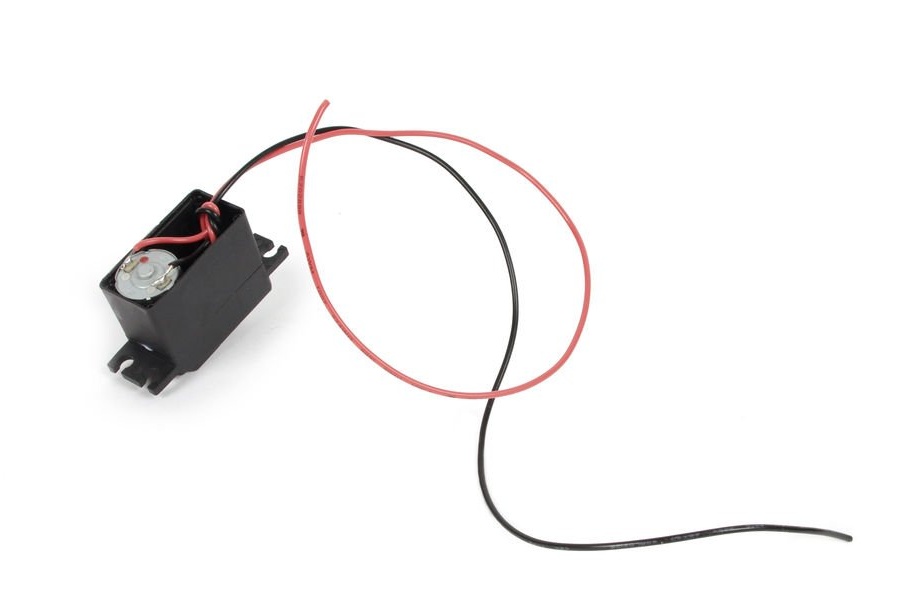
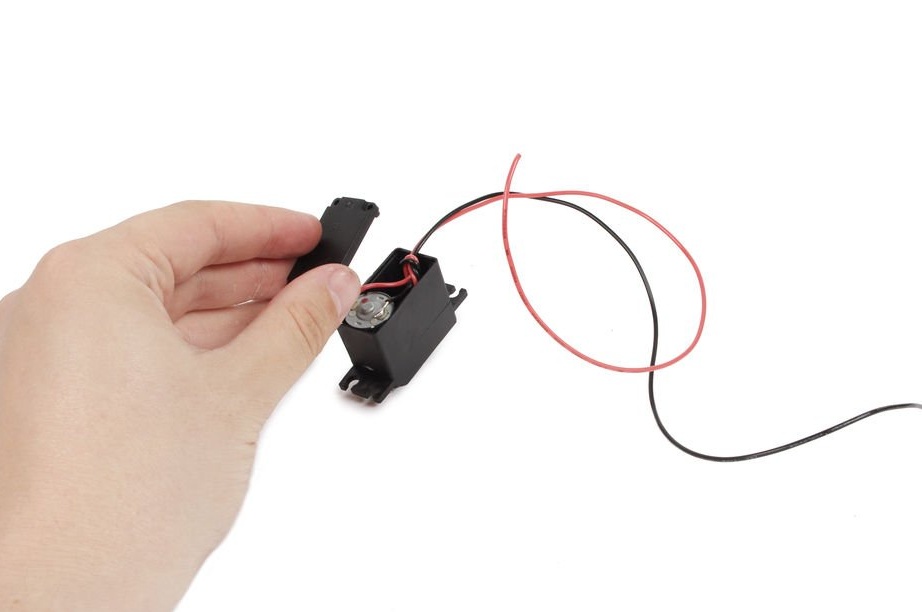

Aprire l'alloggiamento del servo svitando 4 viti sul pannello inferiore. Decomprimere la scheda all'interno e collegare il cablaggio rosso e nero a ciascun terminale dell'unità.
Aprire la trasmissione ad ingranaggi e trovare l'ingranaggio con un piccolo cappuccio di plastica che impedisce la rotazione continua. Tagliare il cappuccio dall'ingranaggio.
Passaggio 3: trapano
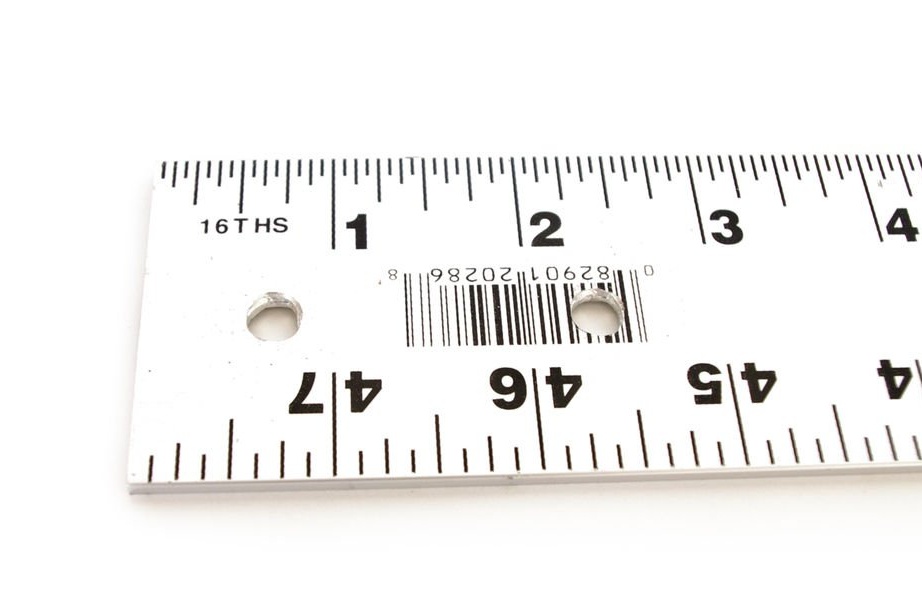


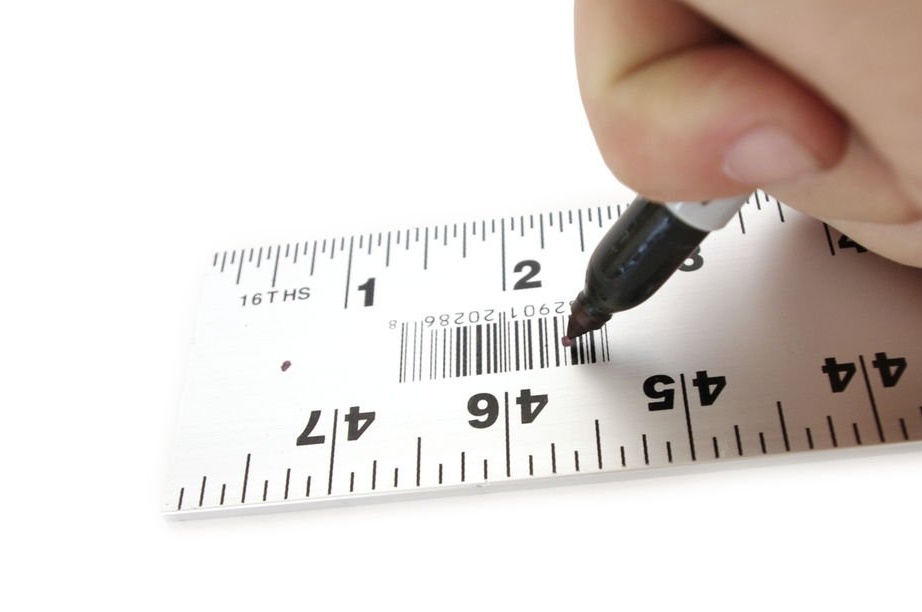
Praticare un foro di un quarto di pollice (6,3 mm) al centro del righello, a circa 15 mm dal bordo corto. Praticare un secondo foro a circa 60 mm dallo stesso bordo.
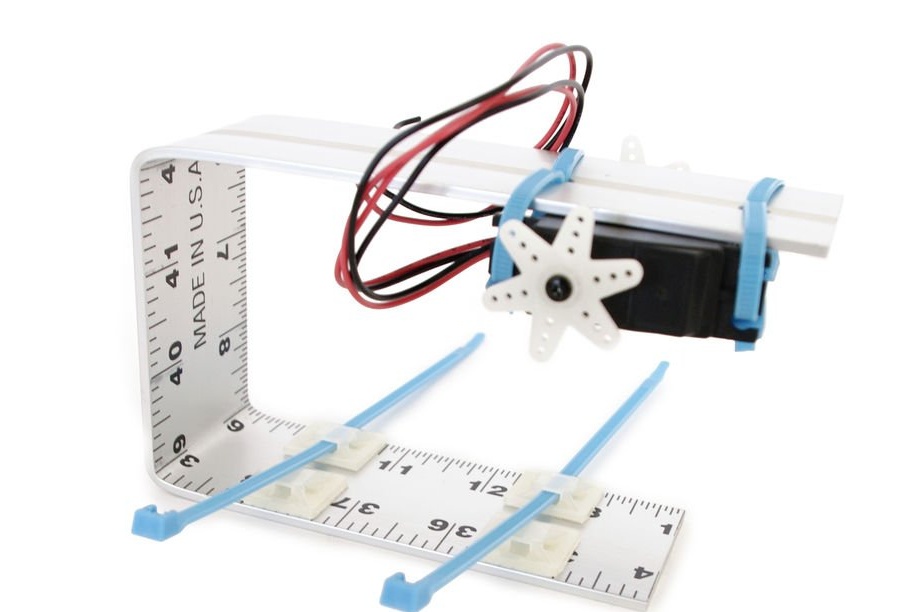
Passaggio 4: piega

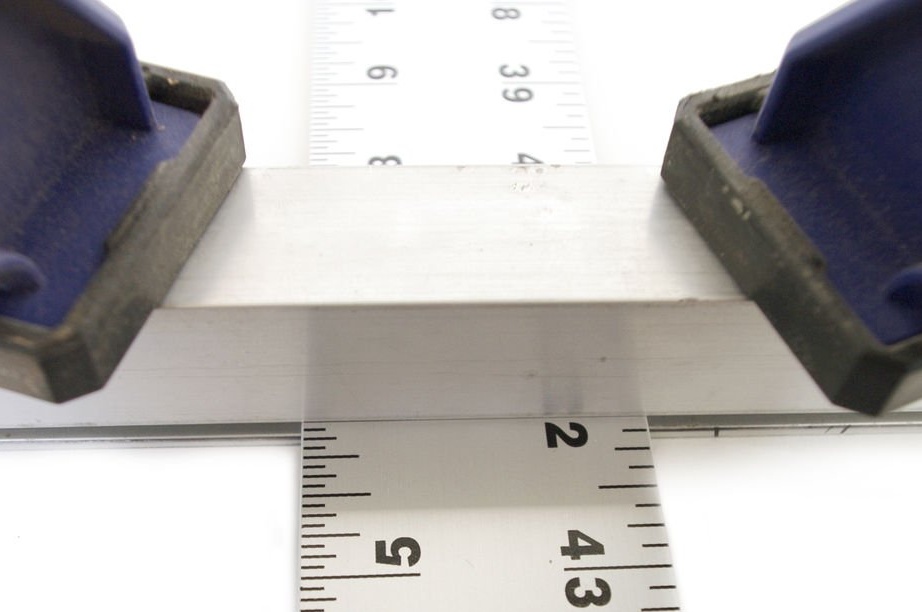
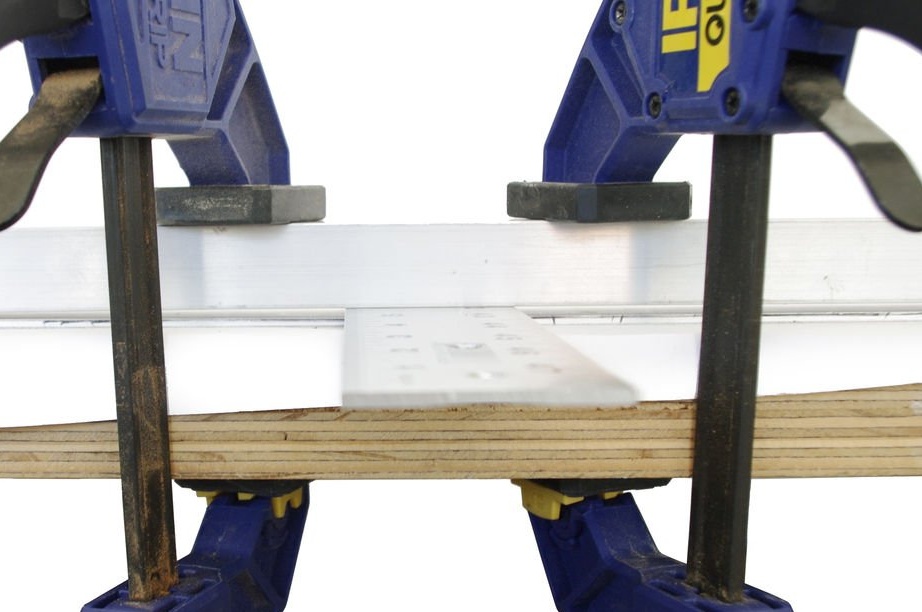

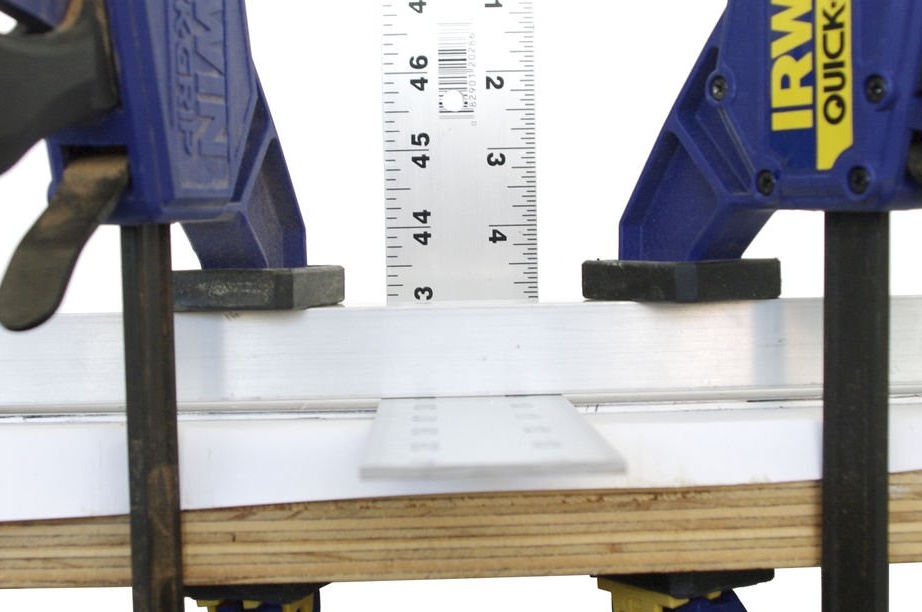

Usando una morsa o due piastre metalliche fissate sul bordo del tavolo, piega il righello con un angolo di 90 gradi ad una distanza di 15 cm dal bordo in cui sono stati praticati i fori.
Fai la stessa curva con un angolo di 90 gradi ad una distanza di 15 cm dall'altro bordo. Otterrai una figura sotto forma della lettera P.
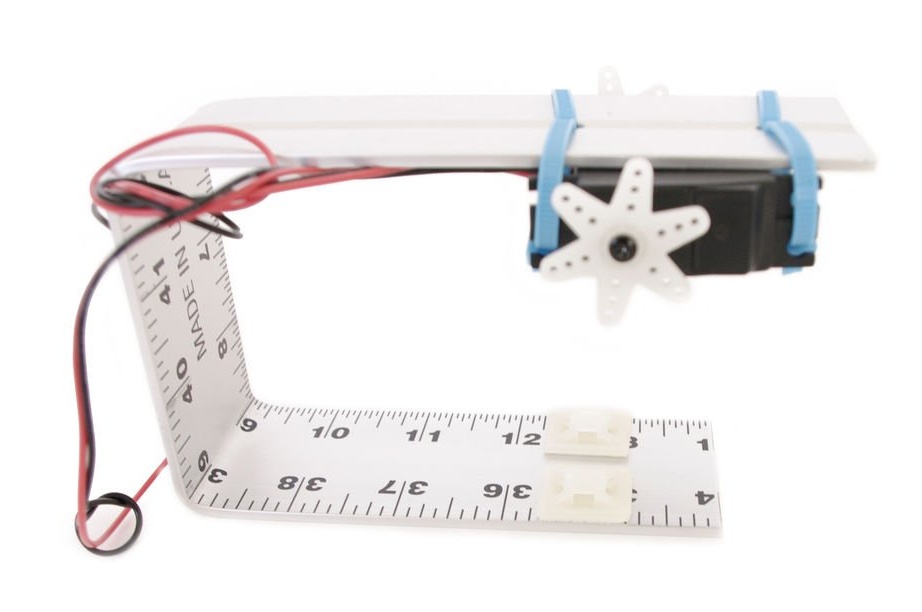
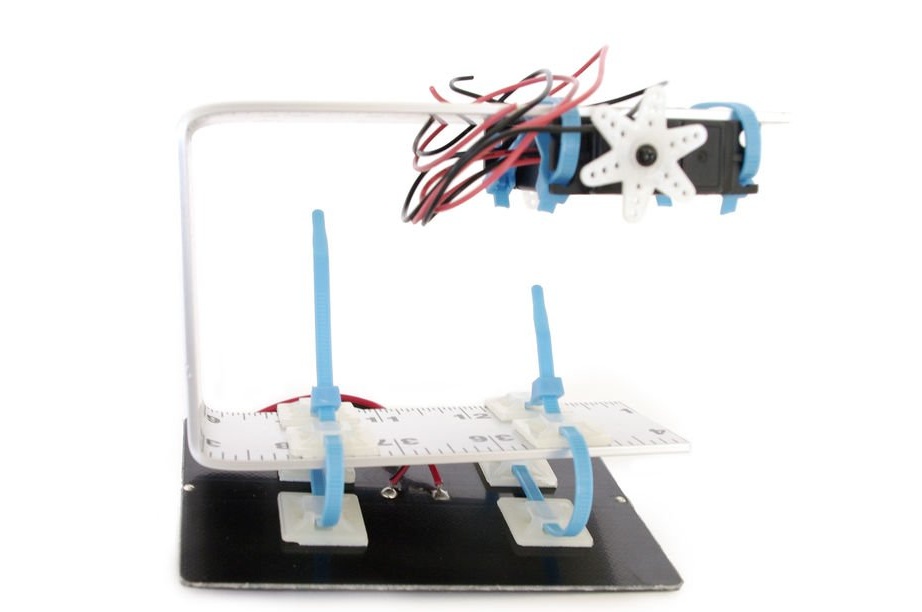
Passaggio 5: connessione
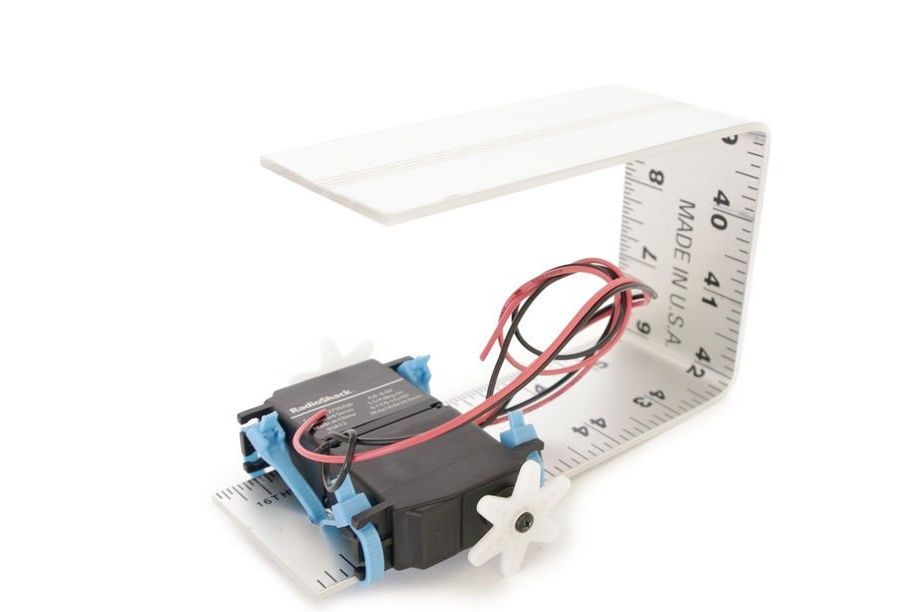

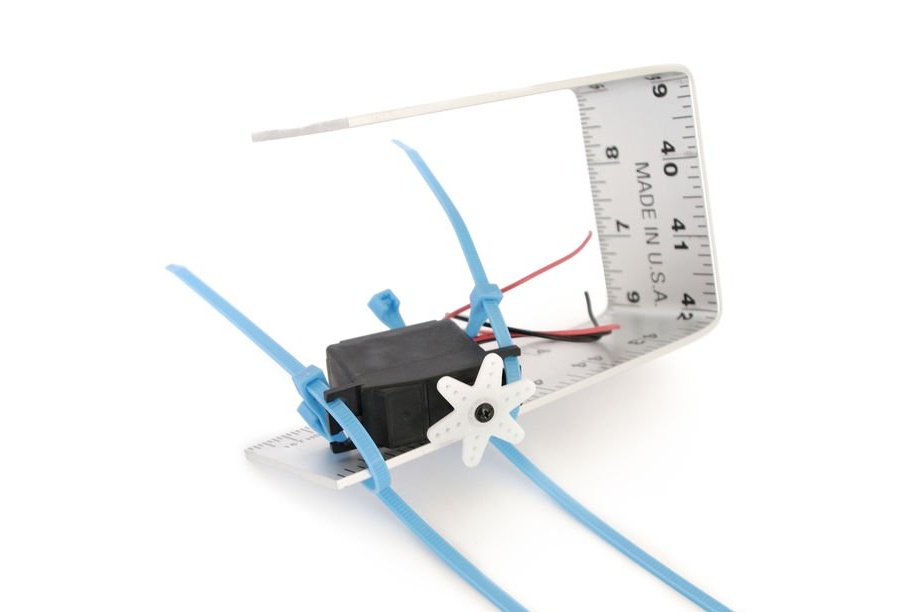
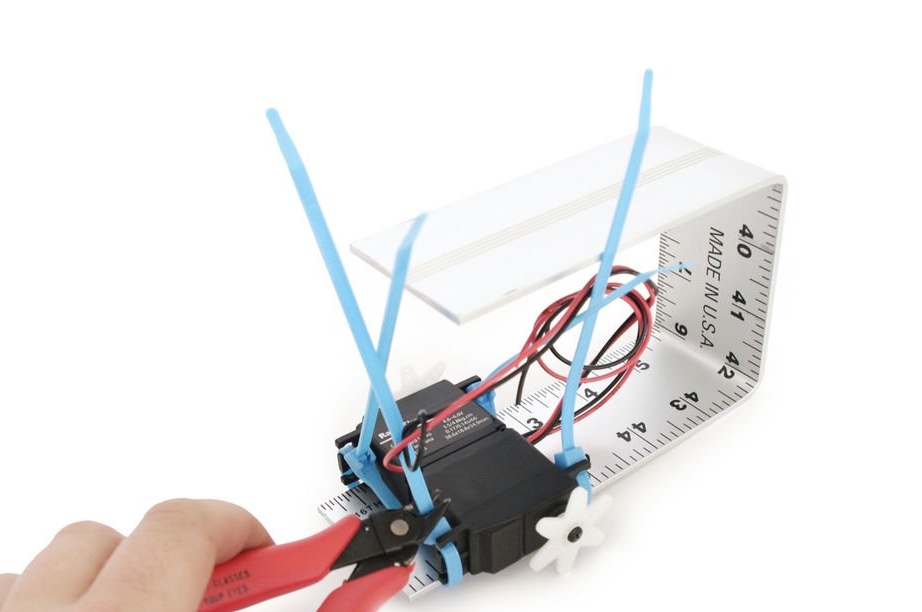
È necessario fissare i servi sulla linea con morsetti di plastica, attraverso fori. I servomotori devono sedersi con le spalle l'un l'altro.
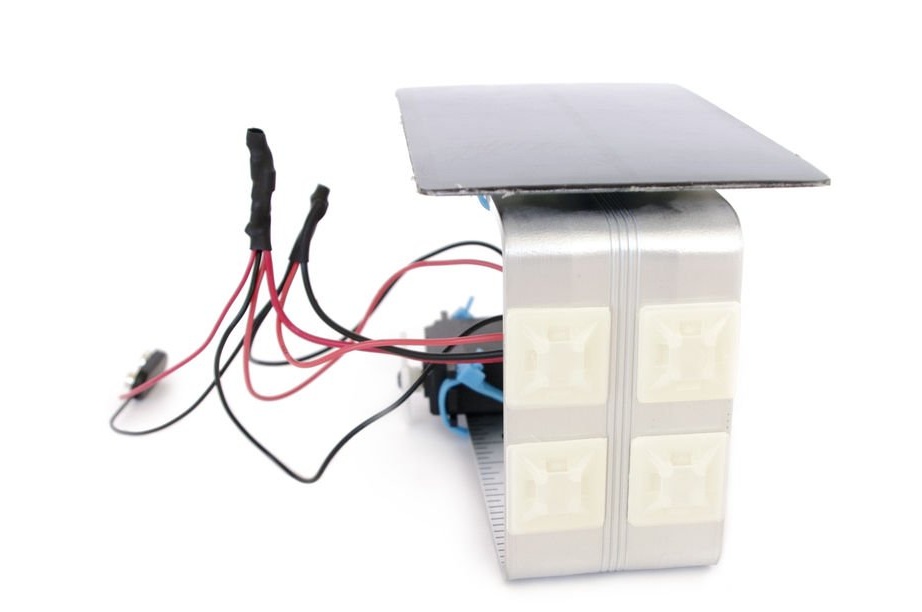
Passaggio 6: base per morsetti
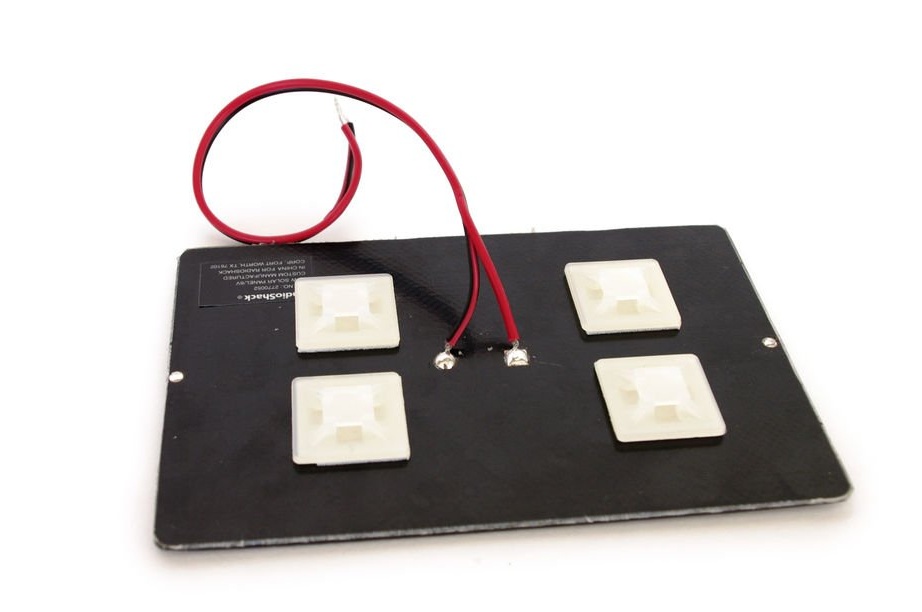

Posizionare due coppie di basi di fissaggio una accanto all'altra sul retro del pannello solare. È importante che i canali di ciascuna coppia siano sulla stessa linea.
Passaggio 7: più motivi
Attacca altre due basi all'interno della barra a U, sul lato opposto ai servi.
Passaggio 8: connessione
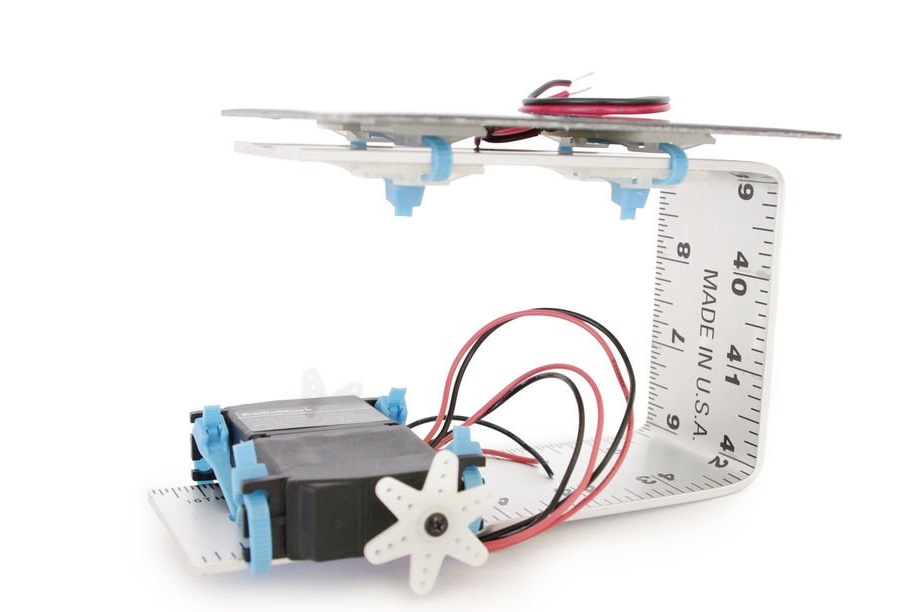
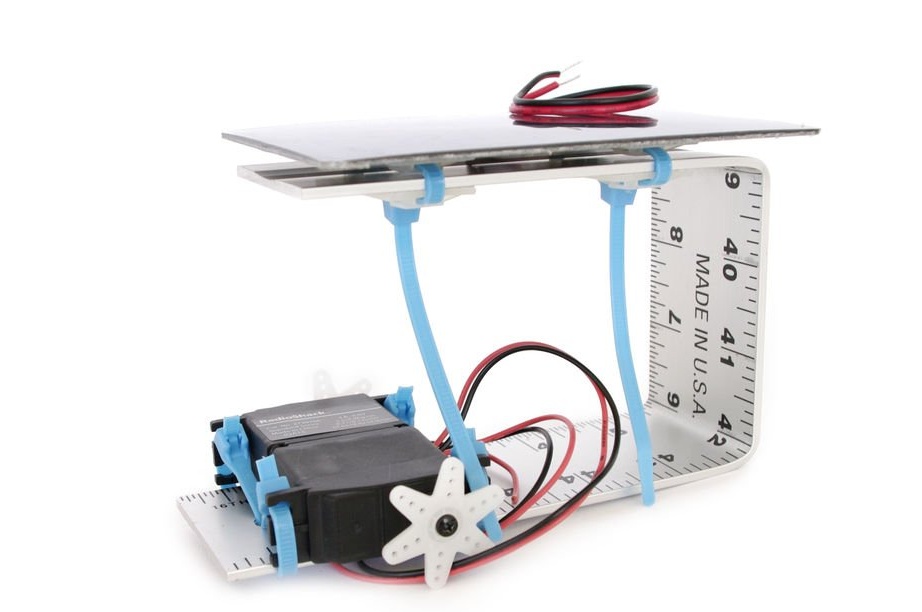
Fissare il pannello solare con morsetti attraverso basi fisse.
Passaggio 9: inserire le batterie


Inserire le batterie nel pacco batterie.
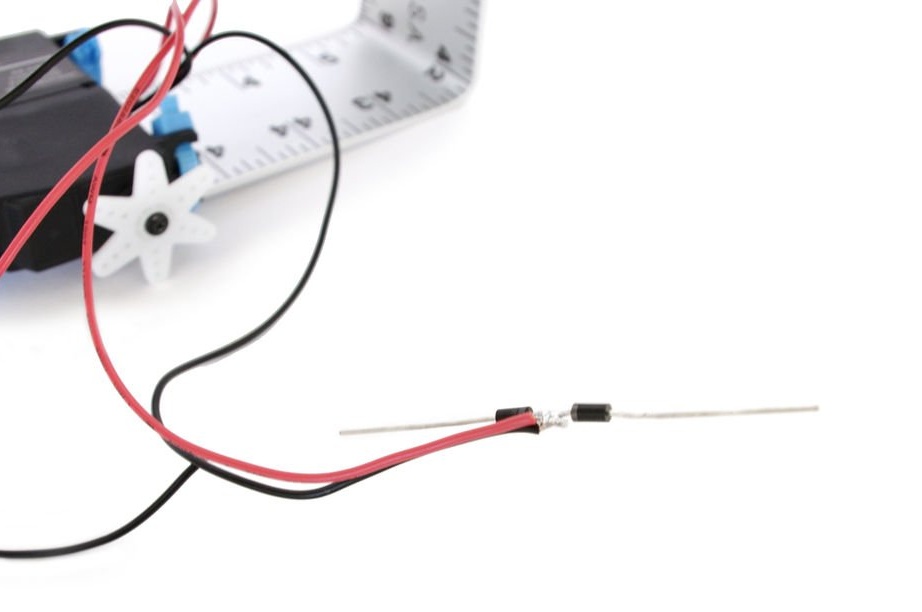
Passaggio 10: diodi

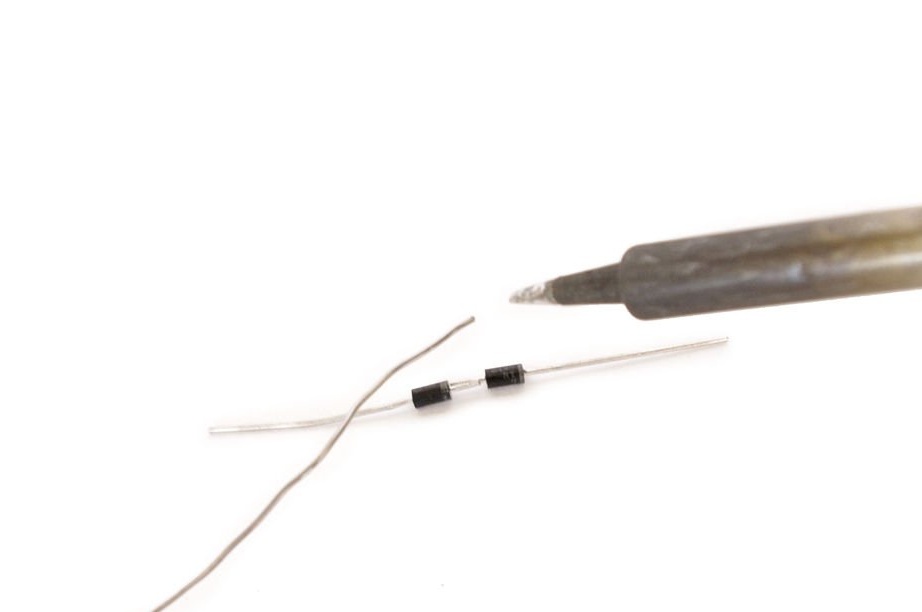
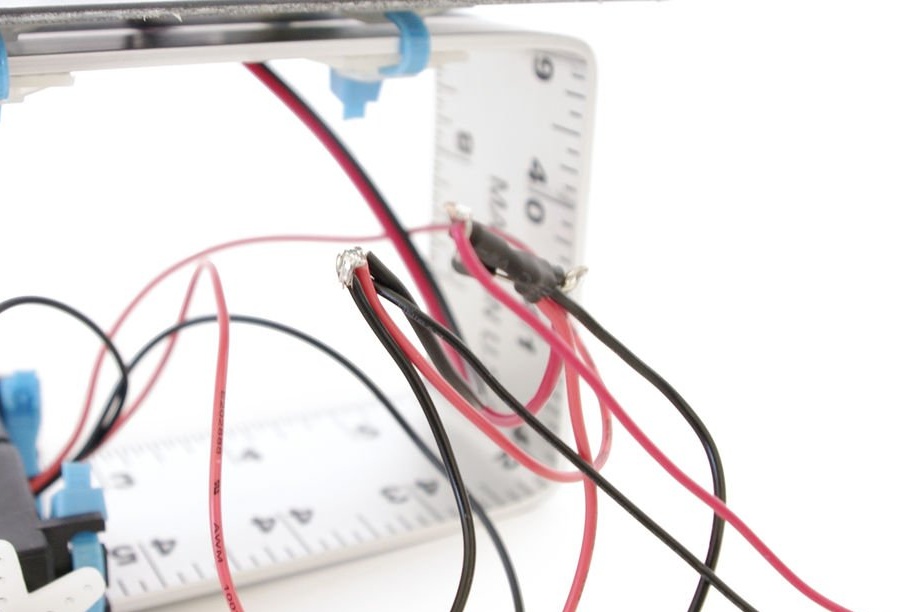
Saldare i due diodi insieme ai catodi (lato dei diodi con la pista).
Passaggio 11: assemblaggio della catena
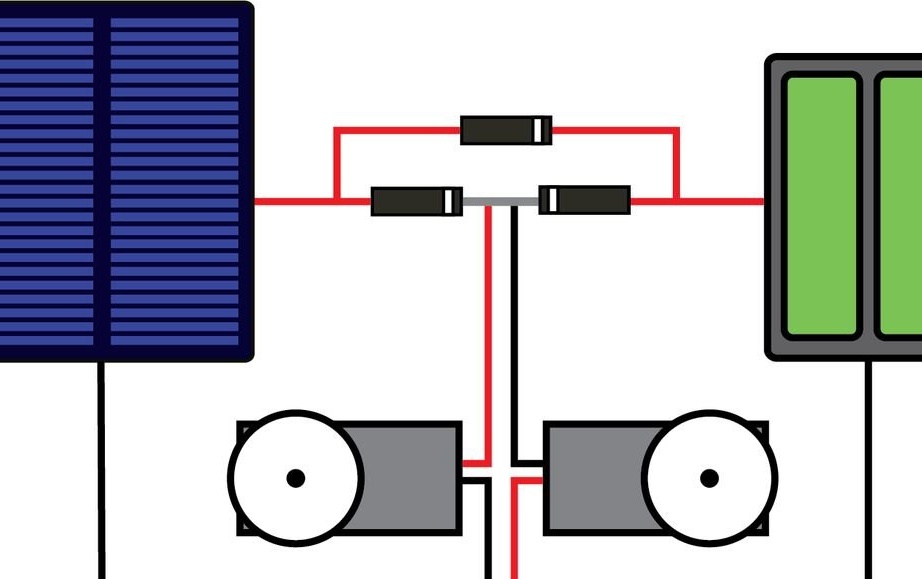
Il circuito per questo robot si basa sul semplice circuito di ricarica solare di David Cook. Il circuito contiene due diodi Schottky collegati al catodo-catodo, un diodo collegato al pannello solare e una delle batterie. Questa configurazione consente di essere alimentato da entrambe le batterie e dal pannello solare, a seconda delle condizioni.
Poiché le batterie sono ricaricabili, un terzo diodo Schottky è collegato direttamente dal pannello solare al vano batterie per caricare le batterie dal sole.
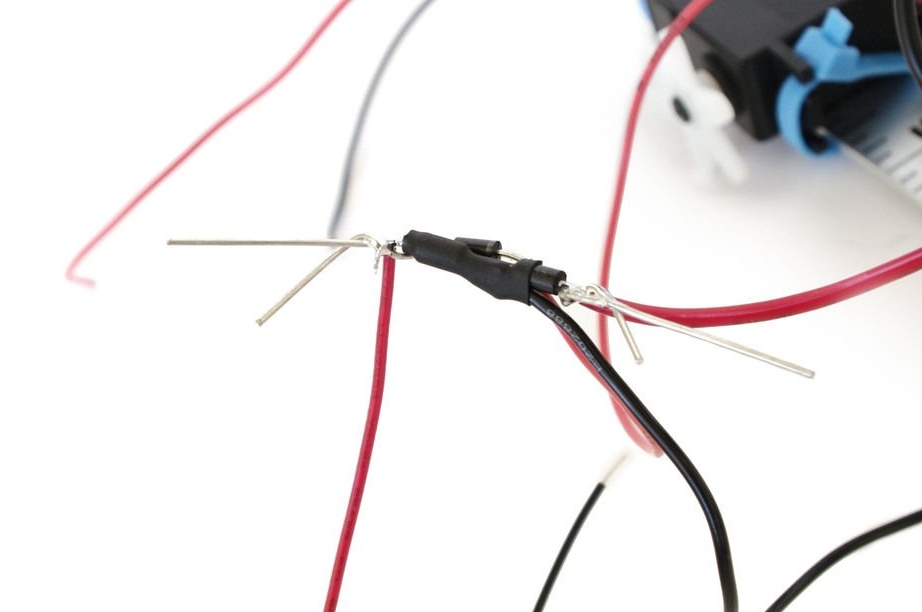
Per connetterlo tutto, collegare il filo rosso da uno dei servi e il filo nero dall'altro al punto centrale della connessione catodica.
Quindi, collegare il filo rosso dal terminale della batteria all'anodo di uno dei diodi Schottky. Collegare il filo rosso dal pannello solare all'anodo su un altro diodo.
Ora saldare l'anodo del terzo diodo al filo rosso che è collegato al pannello solare e il catodo al filo rosso dal terminale della batteria.
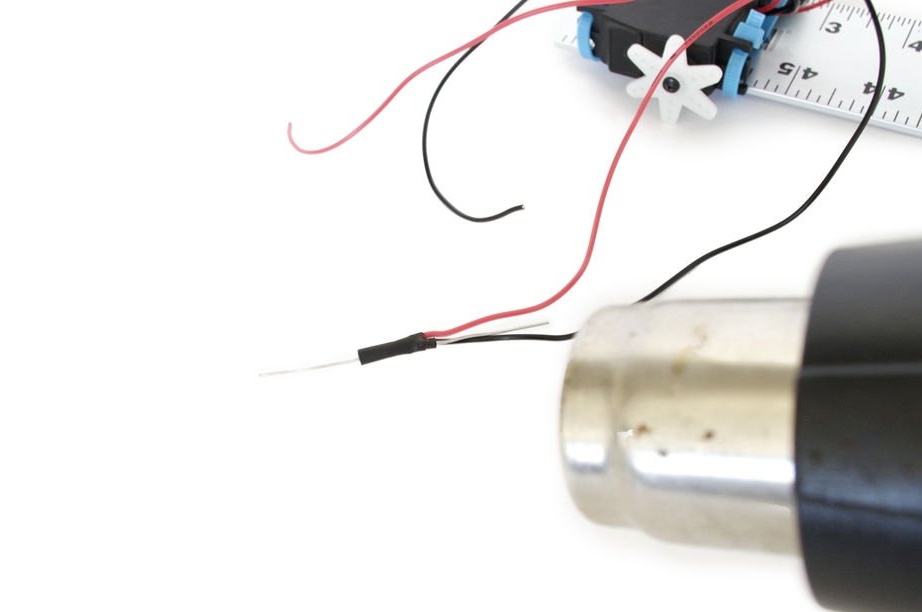
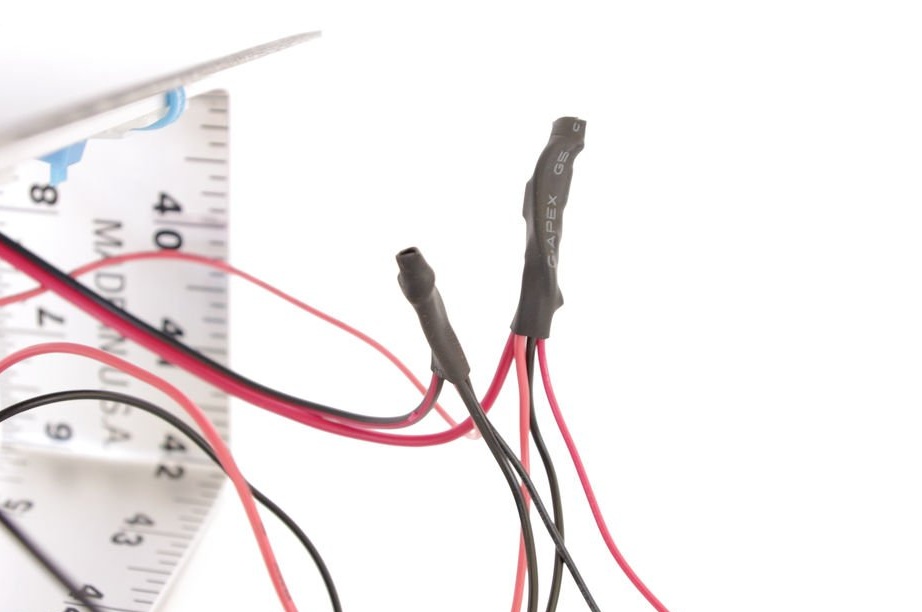
Avvolgere tutti i fili con un tubo termorestringente per proteggere il circuito da cortocircuiti.
Passaggio 12: alcuni altri cavi
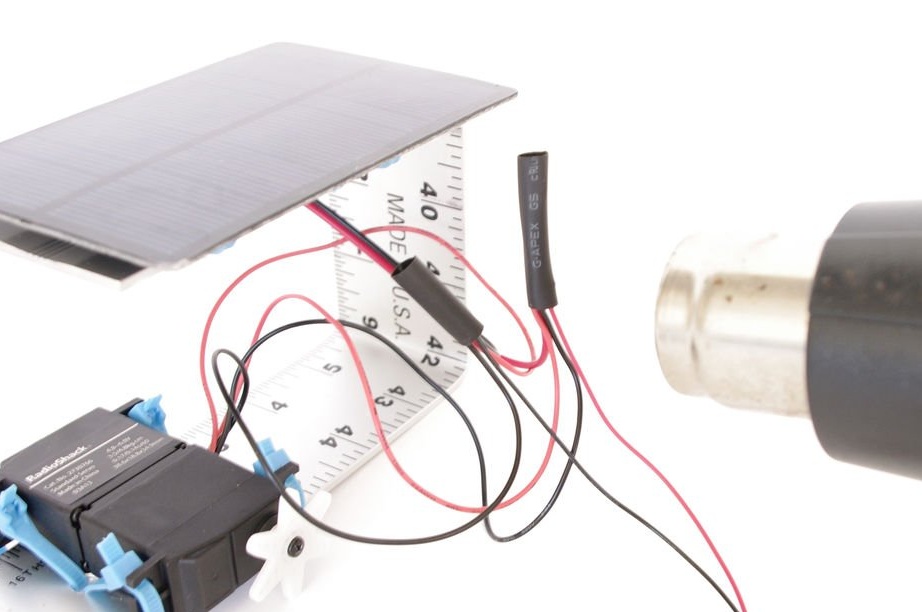
Saldare insieme tutti i fili neri e i rimanenti fili rossi liberi dai servi.
Ottieni due giunti saldati; uno per il potere e uno per la messa a terra. Avvolgere entrambi questi giunti con un tubo termorestringente o nastro isolante.
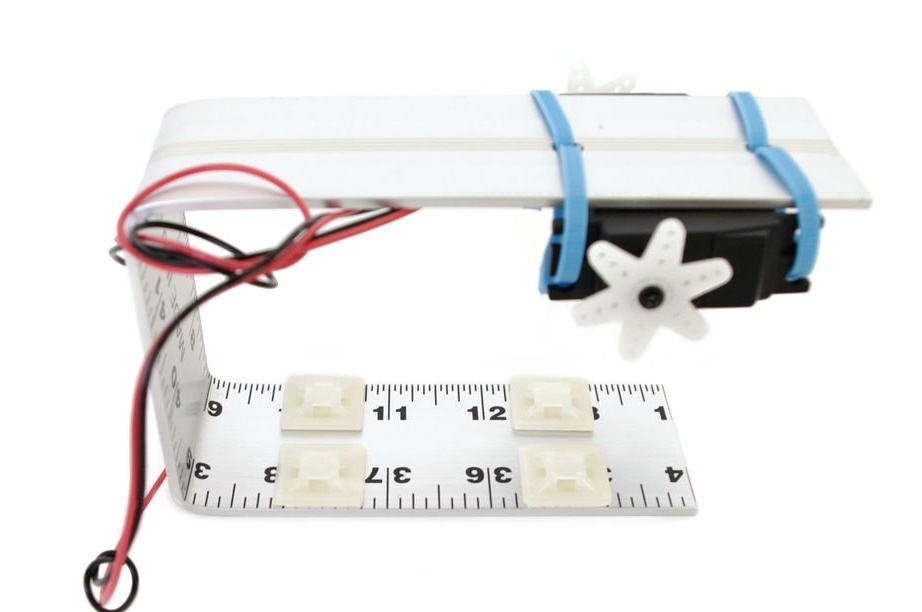
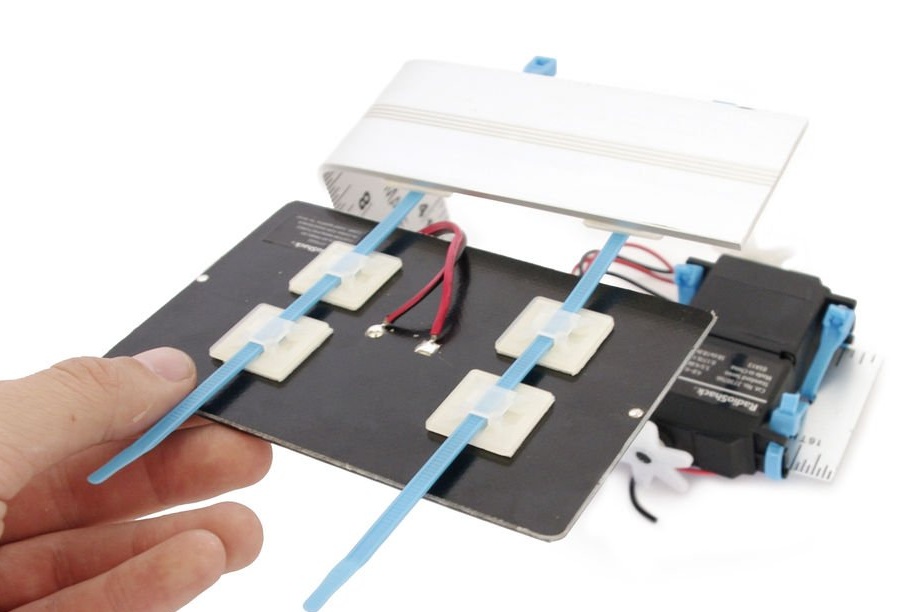
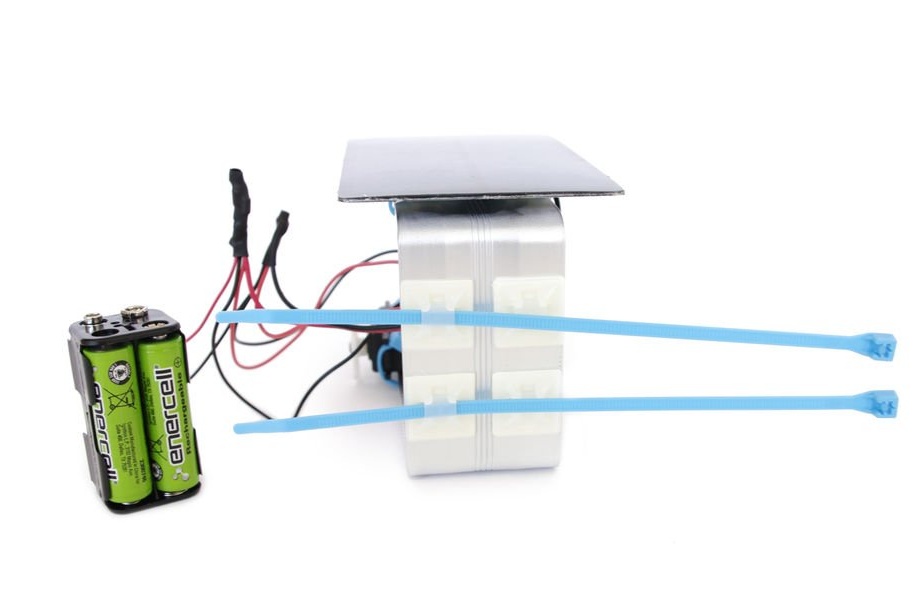
Step 13: E alcuni altri motivi per i morsetti
Fissare due coppie di basi sul lato inferiore del righello curvo a forma di U.
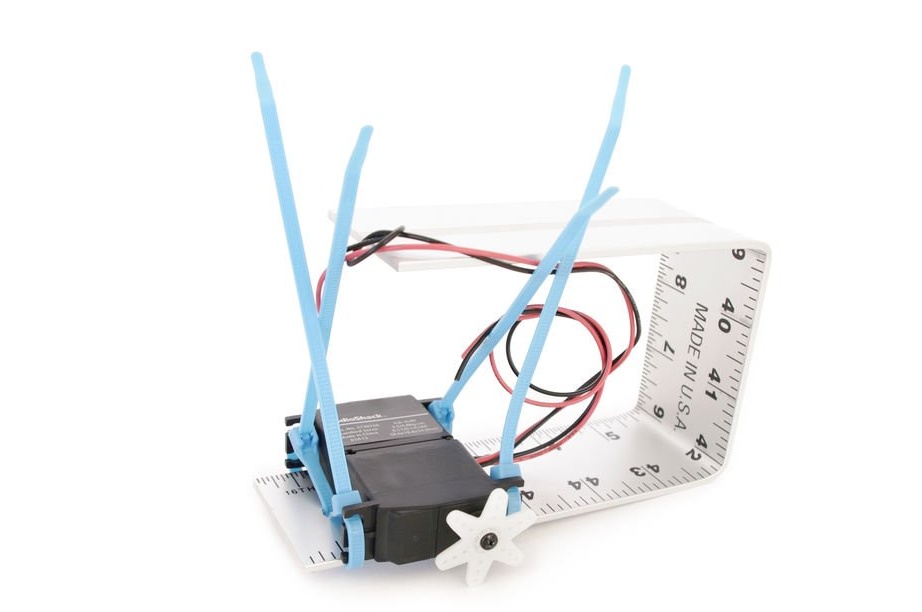
Passaggio 14: fissaggio delle batterie
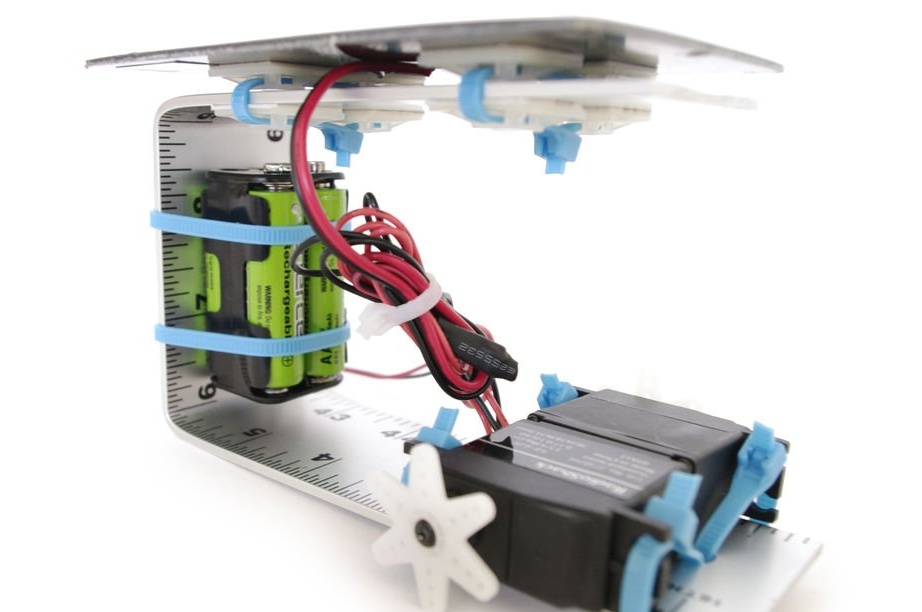
Fissare le batterie con i morsetti all'interno del righello a forma di U in modo che si inseriscano saldamente e immobili in posizione.
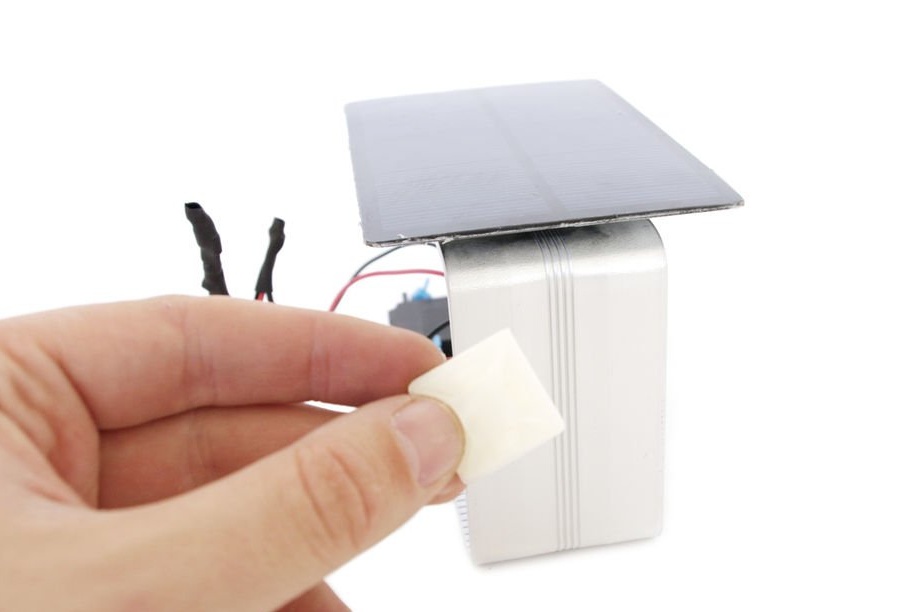
Passaggio 15: taglio


Tagliare i ganci sui supporti da parete in plastica.
Step 16: Ruote
Incollare il supporto da parete sugli ingranaggi esterni dei servi (questo sarà qualcosa di simile alle ruote).
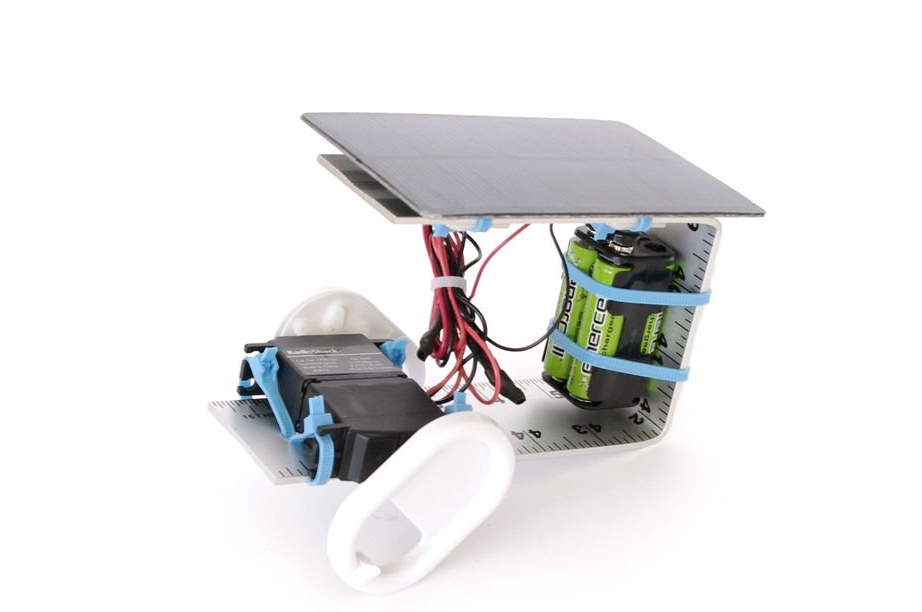
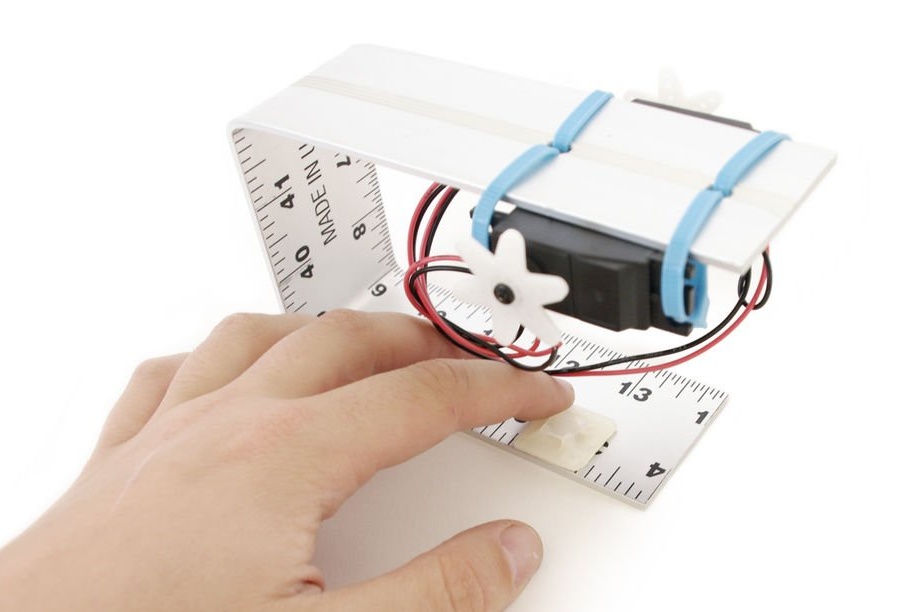
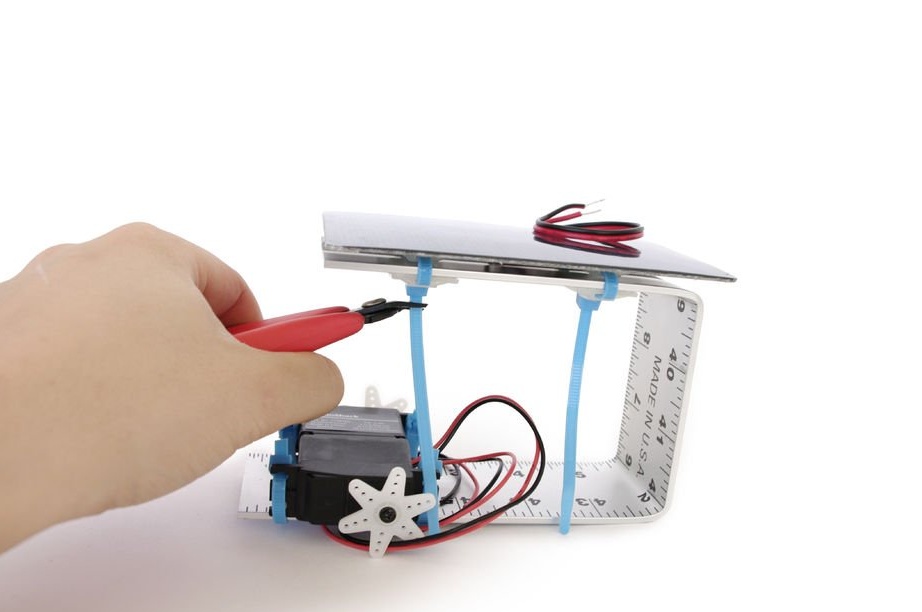
Step 17: Attiva!

Collegare il cavo al pacco batteria e il robot inizierà a muoversi.