
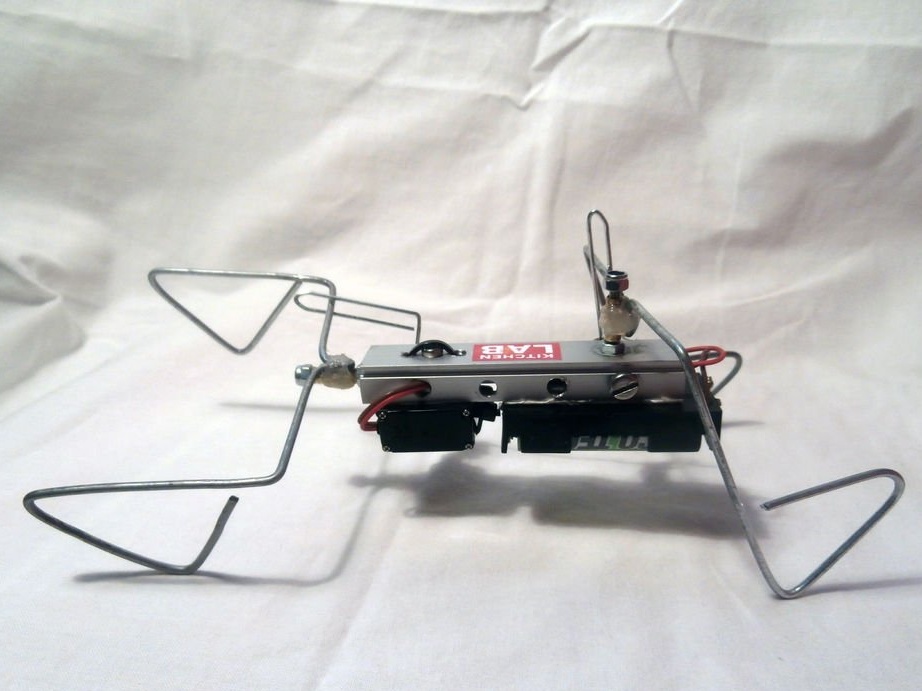
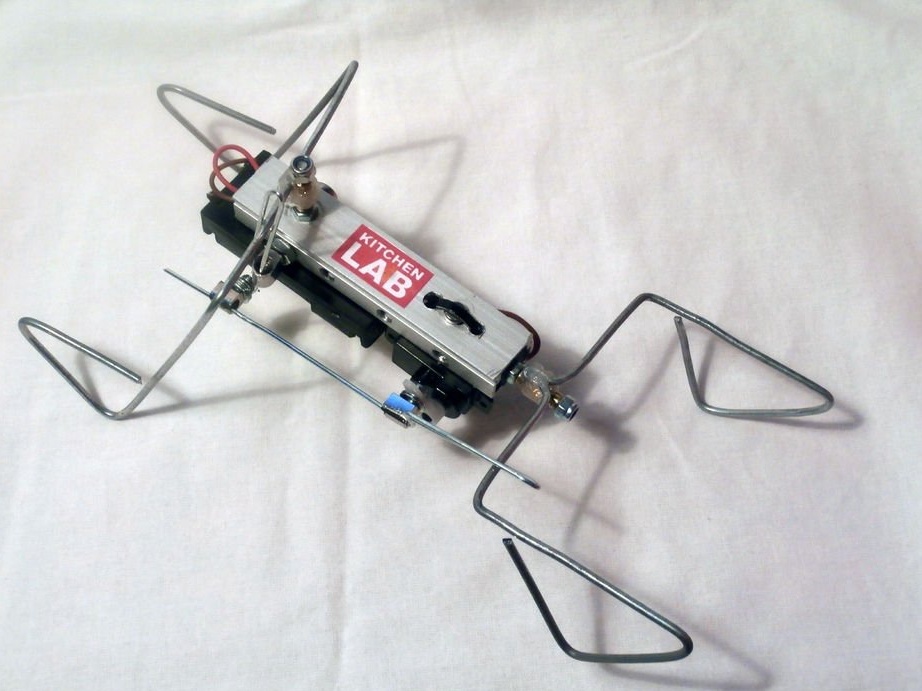
Ciao a tutti! Sono stato ispirato a creare il mio robot BEAM, avendo visto abbastanza di queste meraviglie della robotica monomotore e bimotore su Internet. L'idea era quella di creare un robot ambulante che passi allo stesso modo dei camminatori BEAM a 1 o 2 motori. Dopo diversi esperimenti falliti, ho fatto quello che volevo!
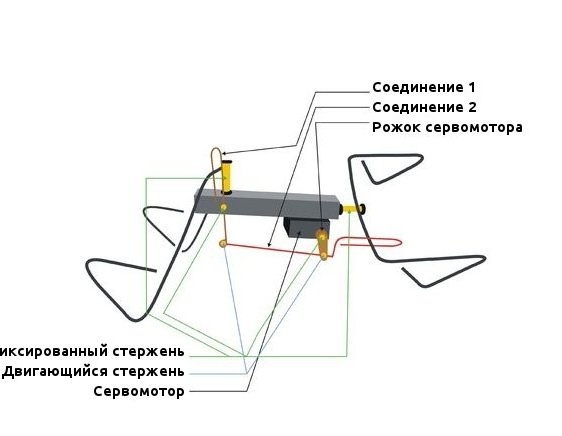
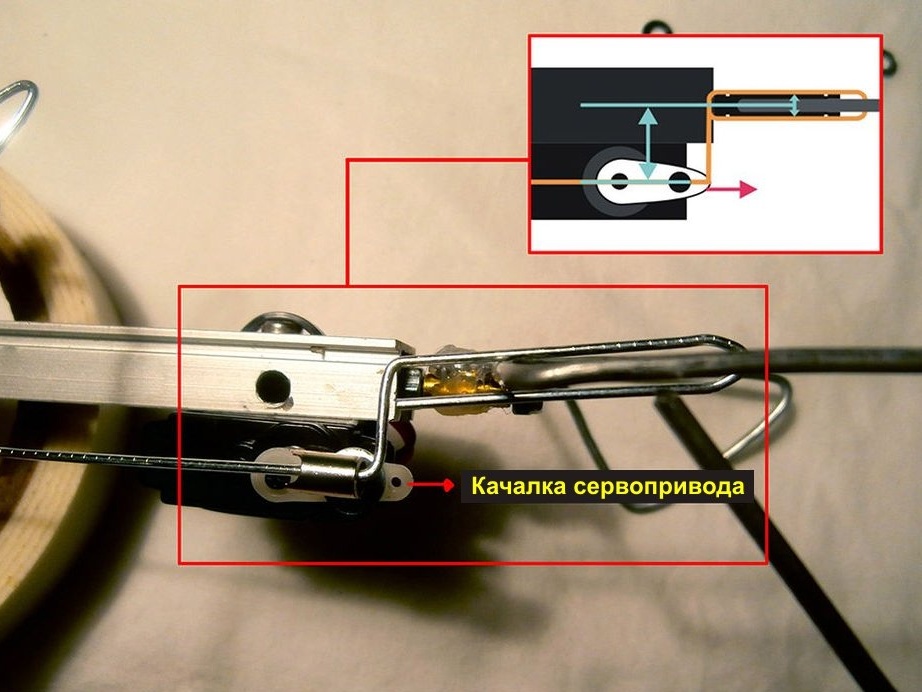
Passaggio 1: il meccanismo
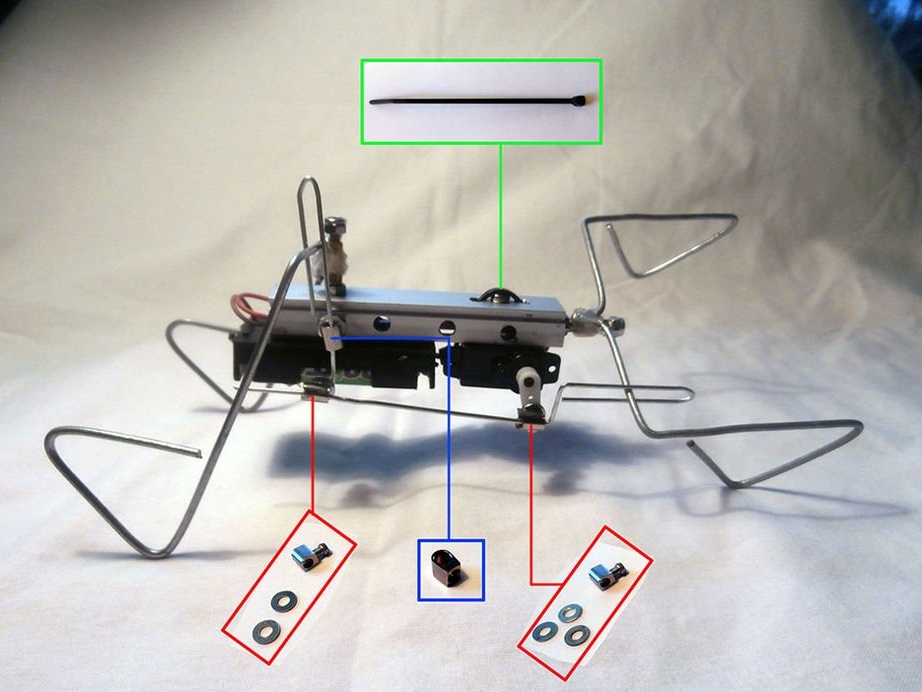
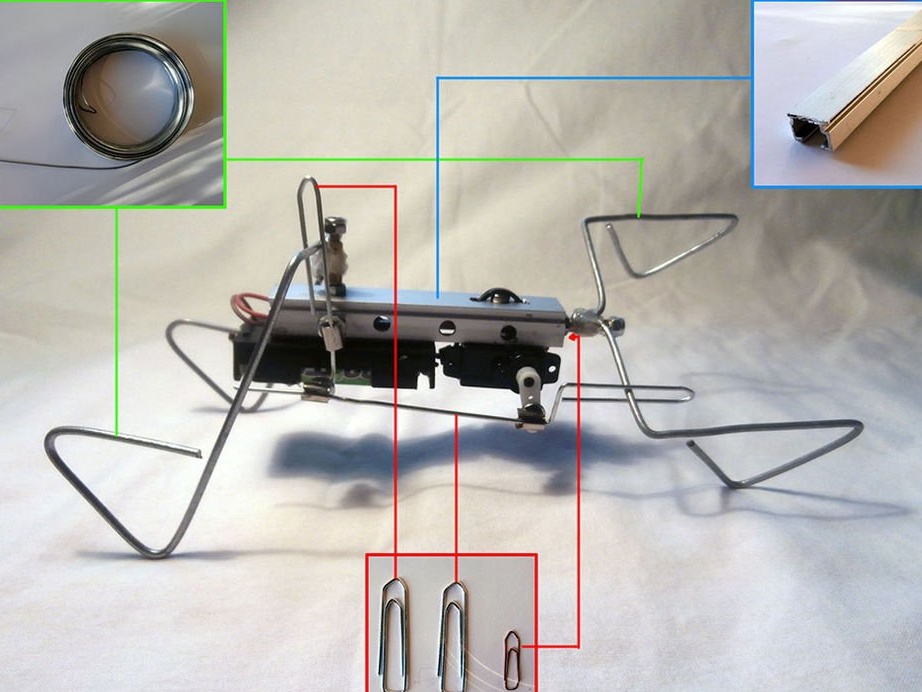
Passaggio 2: parti necessarie

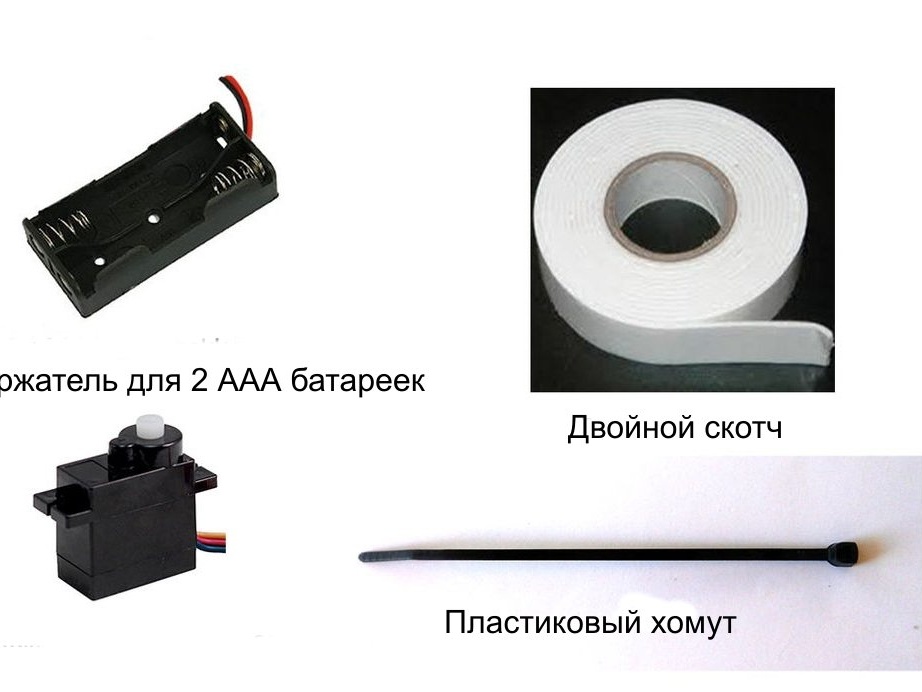



(1x) servo rotazione continua
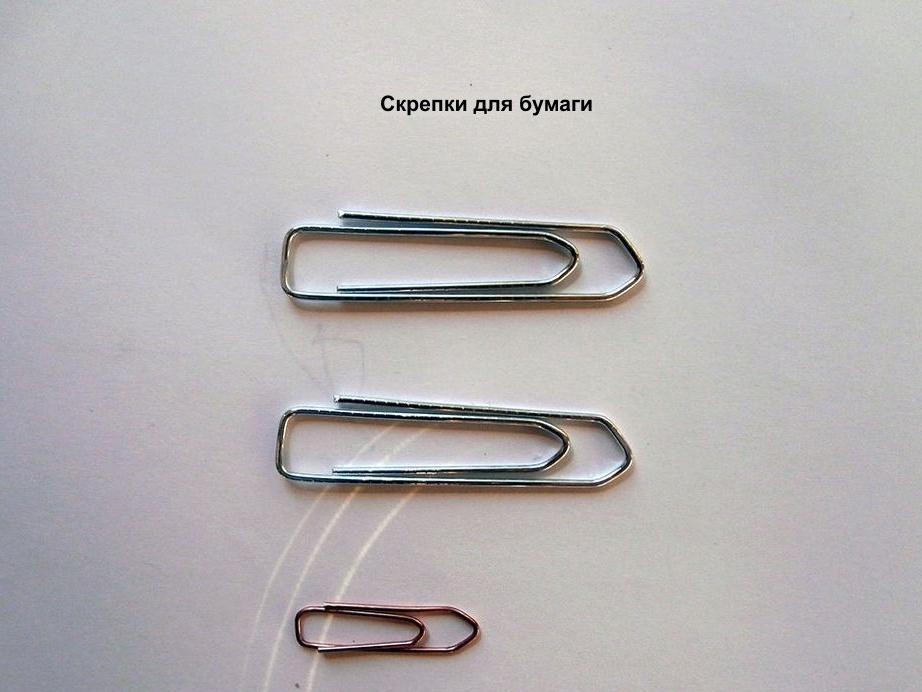
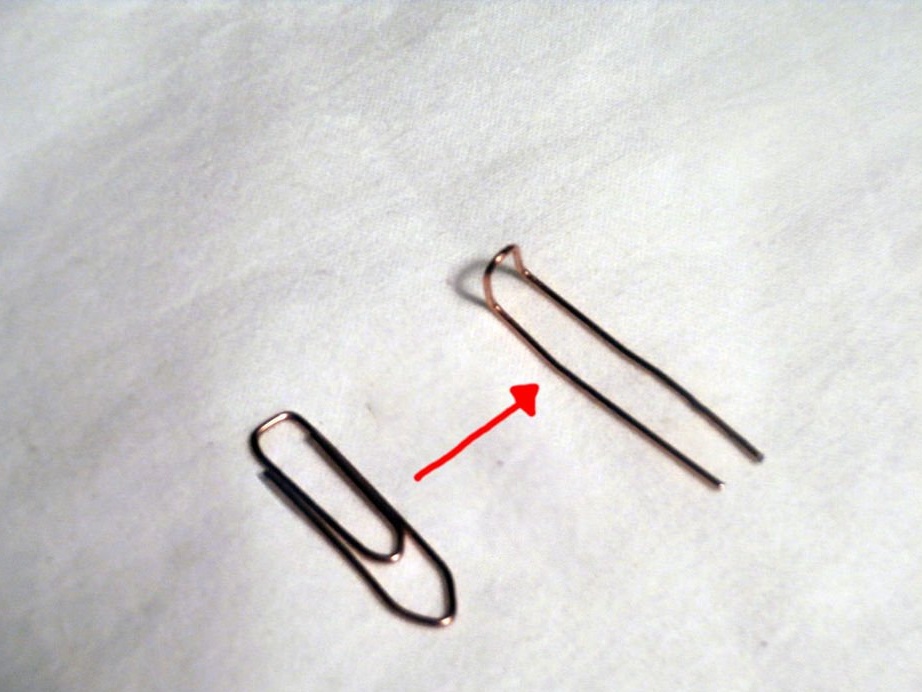
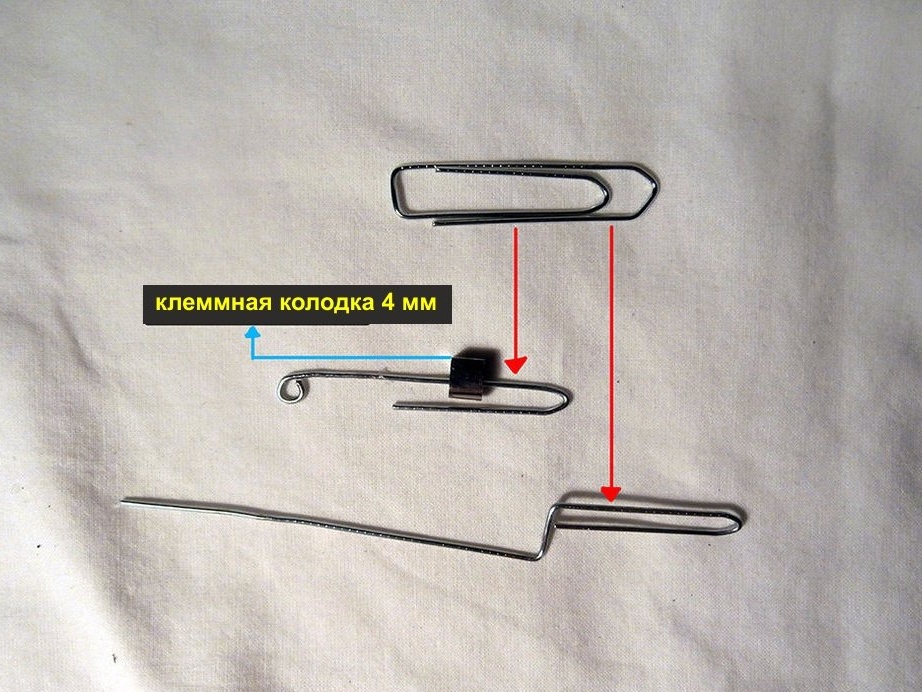
(2x) grandi graffette
(1x) piccola graffetta
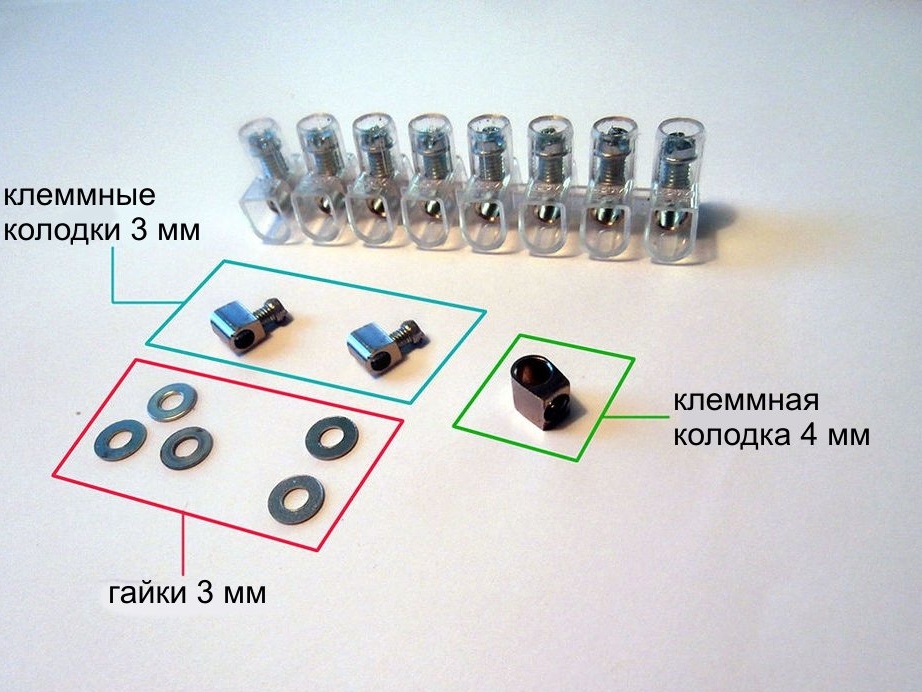
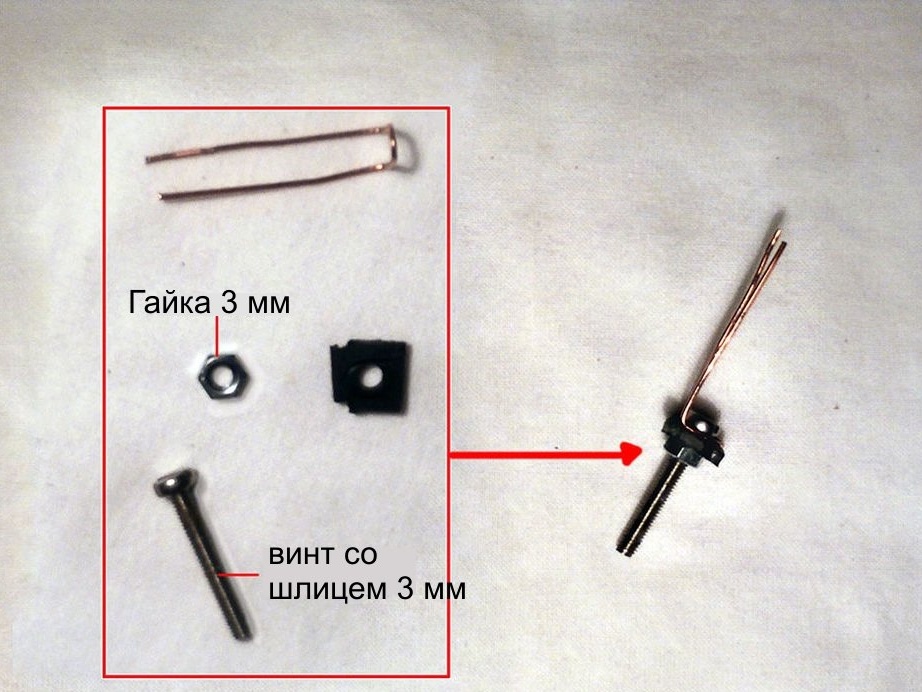
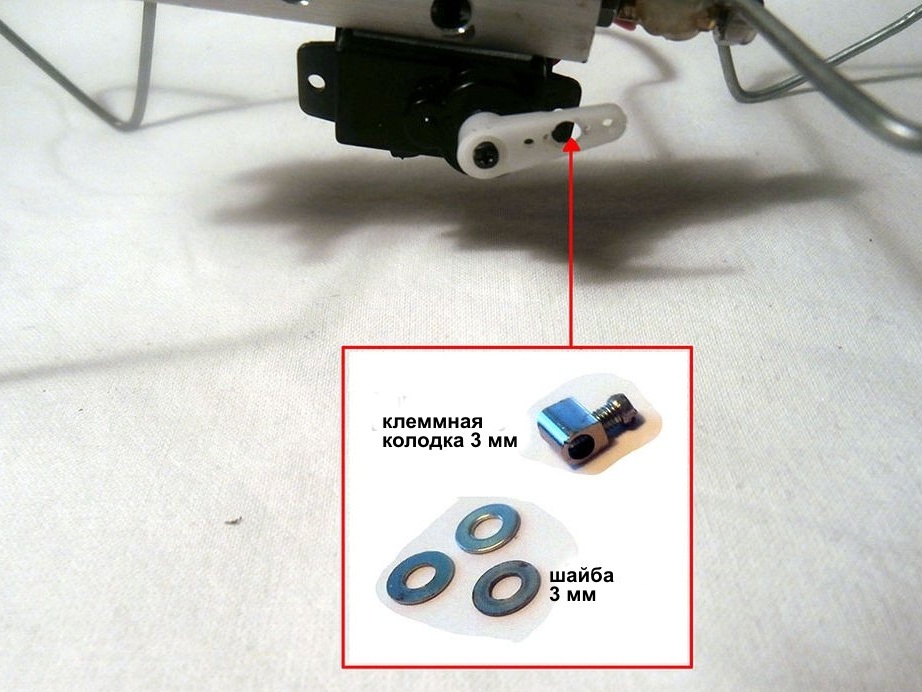
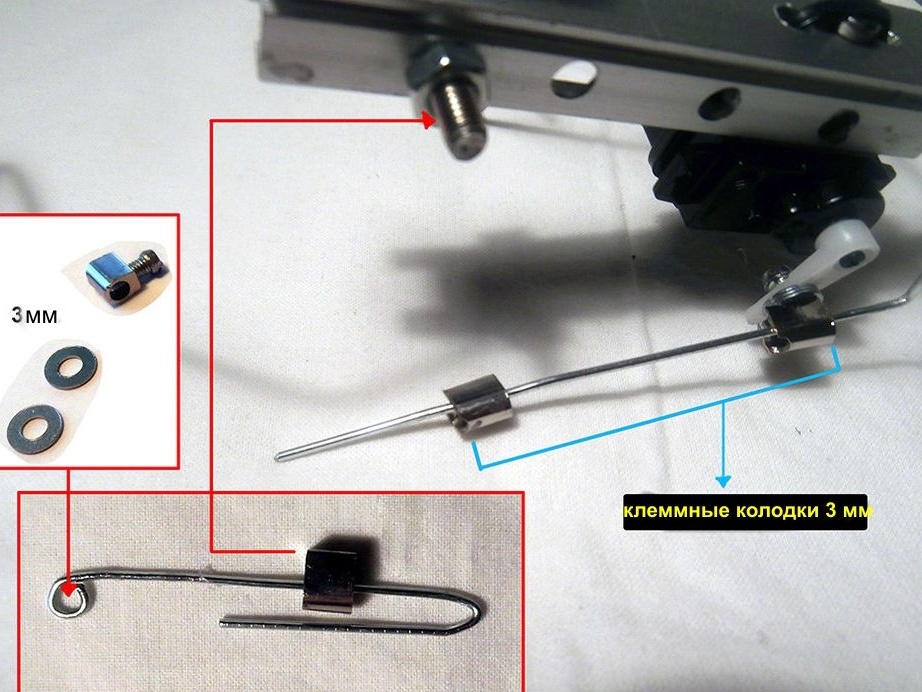
(2x) morsettiere (3mm)
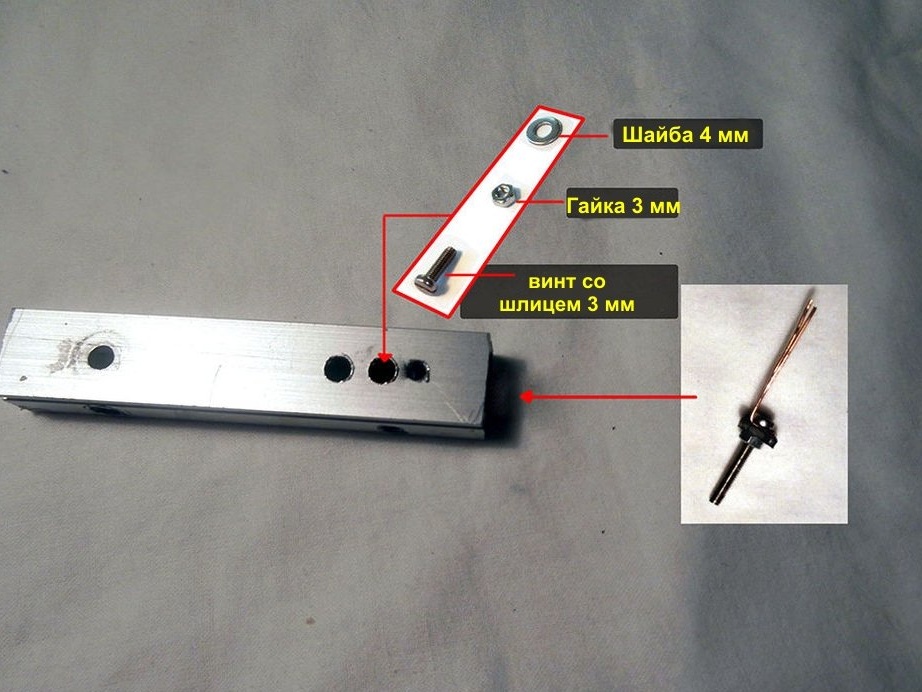
(1x) morsettiere (4mm)
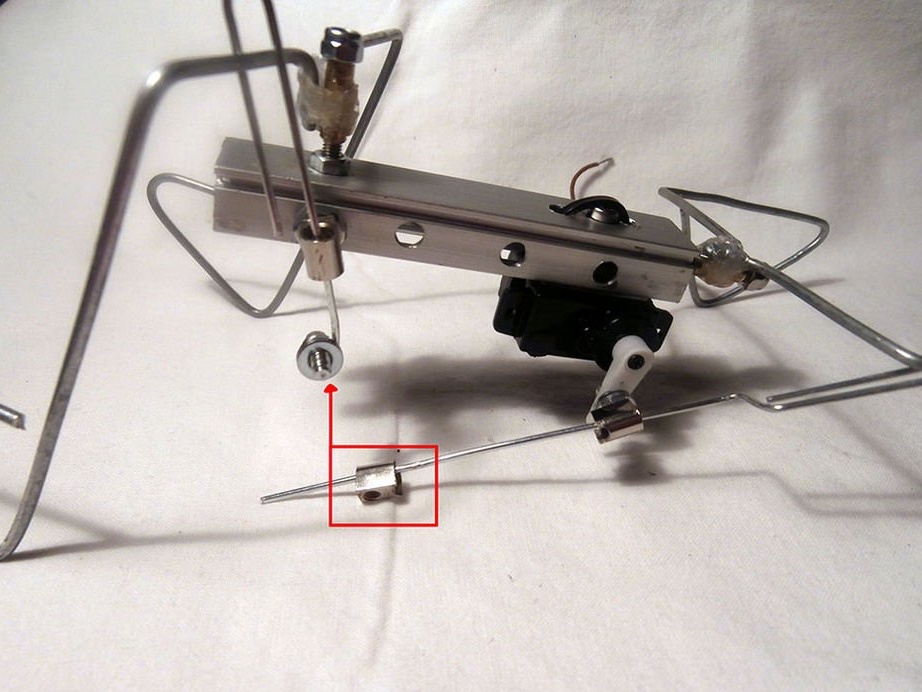
(1X) Blocco profilo in alluminio usato
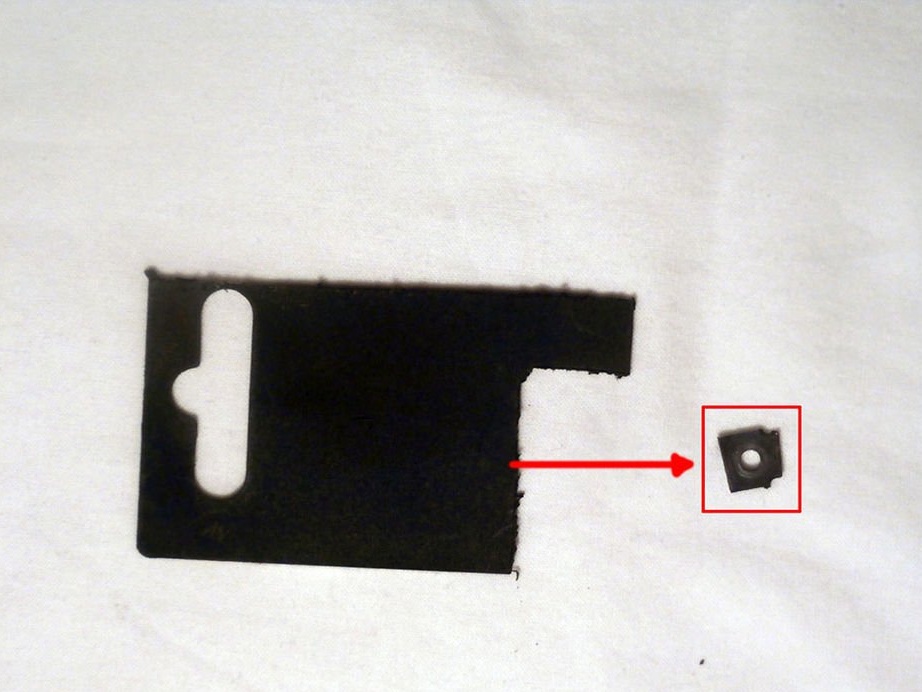
(1X) pezzo di plastica
Filo di acciaio (2 mm)
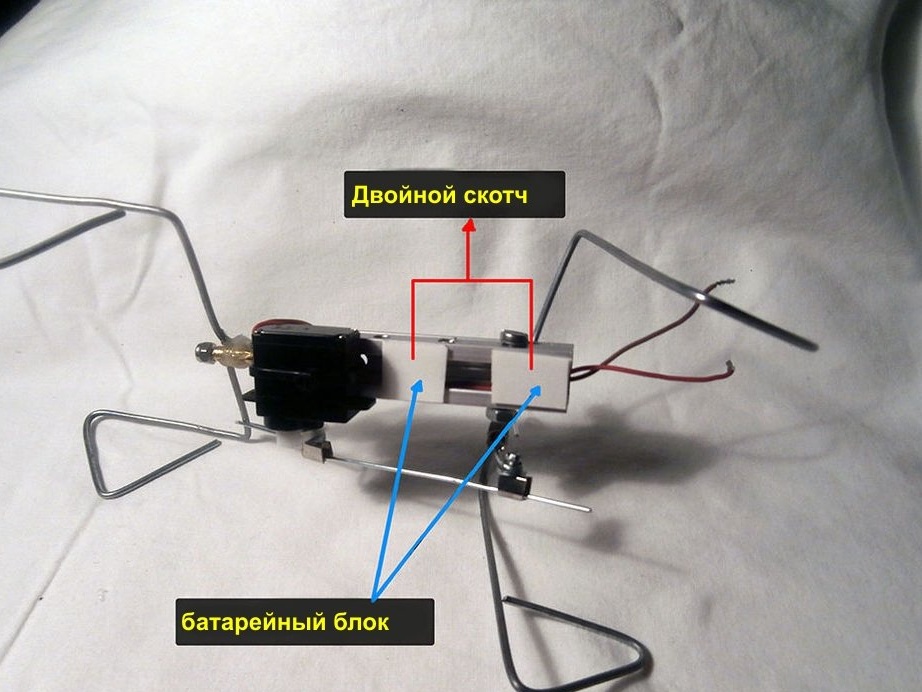
Doppio nastro adesivo
Tubo di ottone
(1X) morsetto piccolo
Batteria (1X) (2 x AAA)
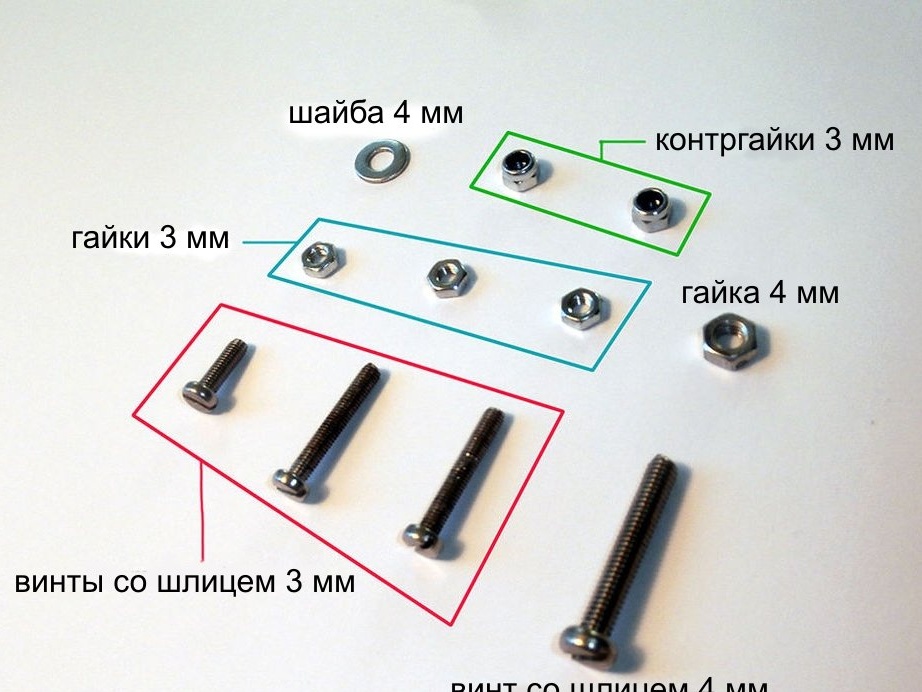
Controdadi (2X) (3 mm)
(3X) dadi e viti (3 mm)
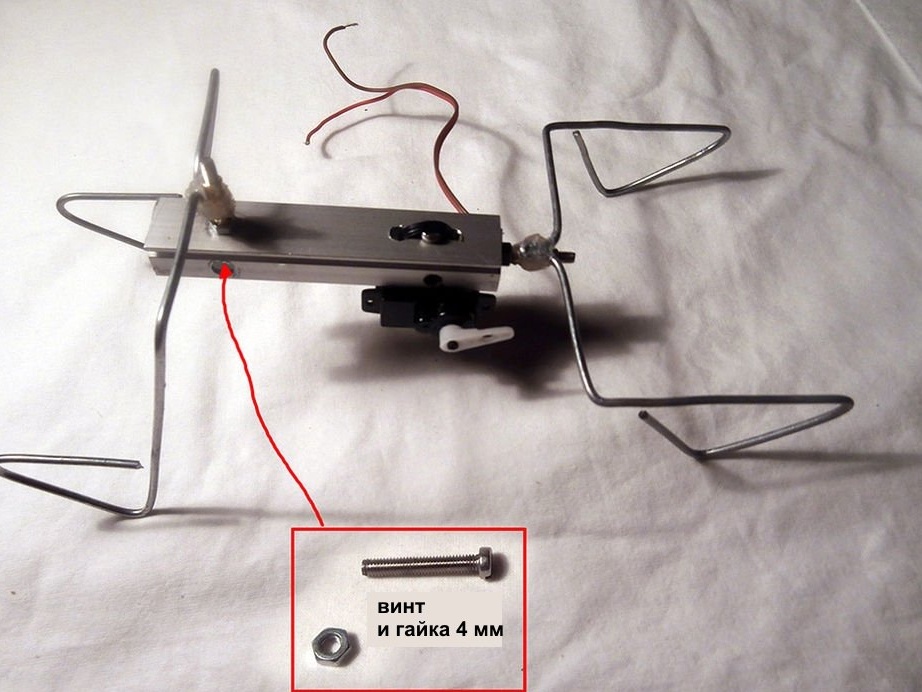
(1x) dadi e viti (4 mm)
(5x) rondella (3mm)
Rondella (1X) (4mm)
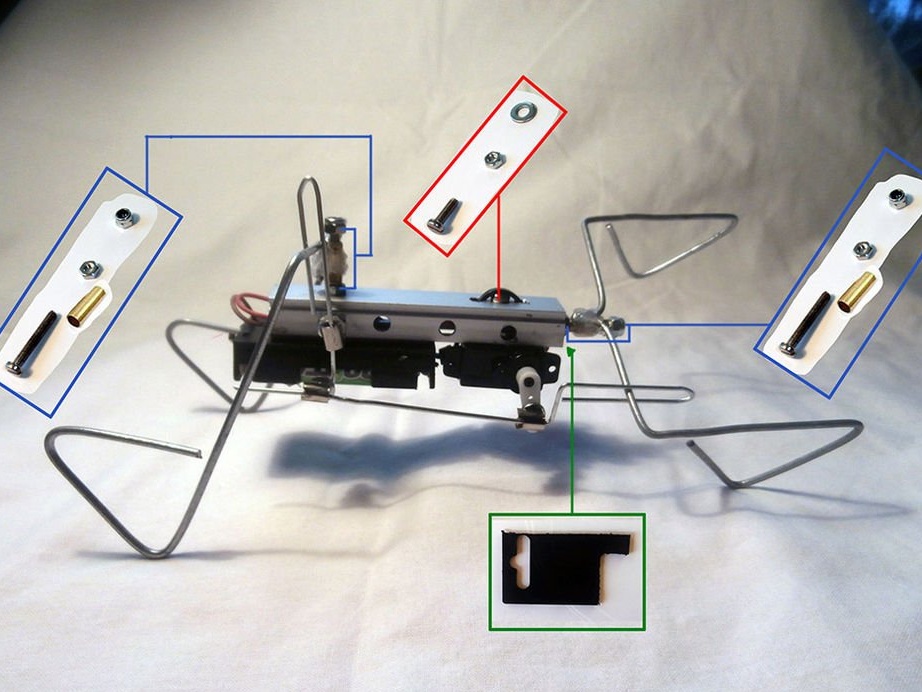
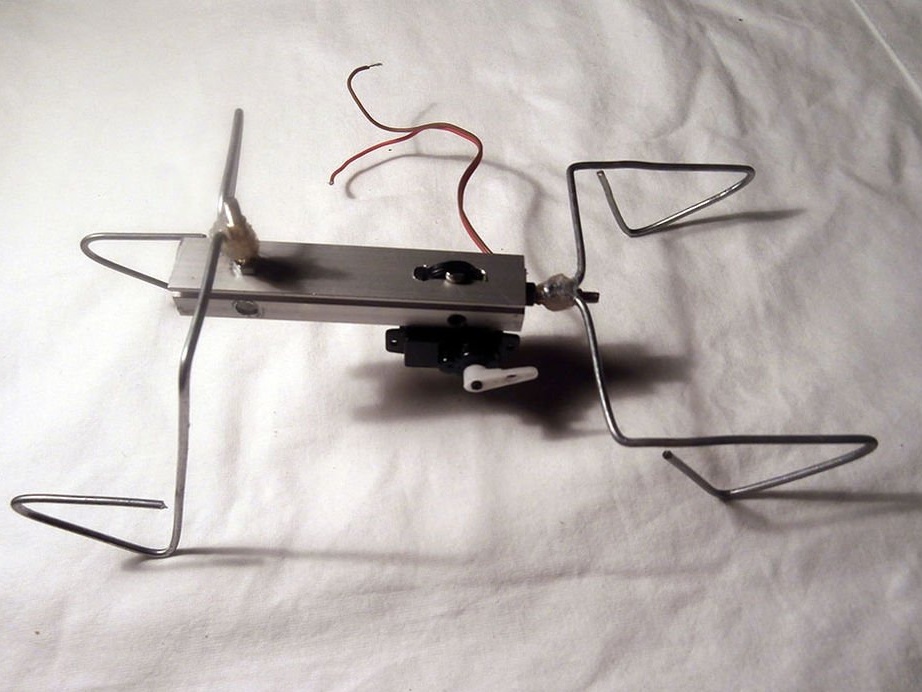
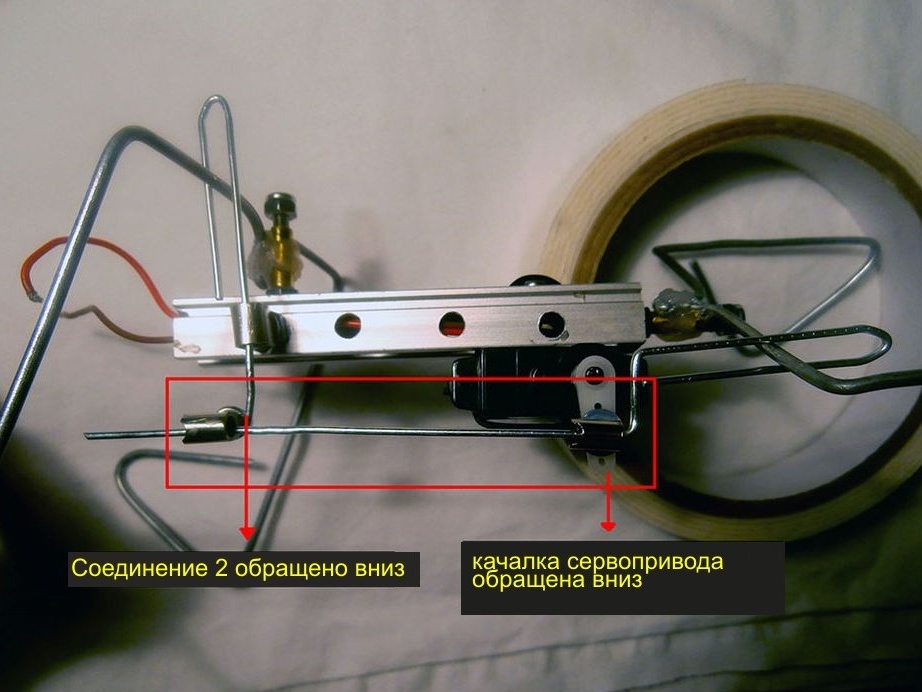
Passaggio 3: assemblaggio delle parti
Passaggio 4: strumenti
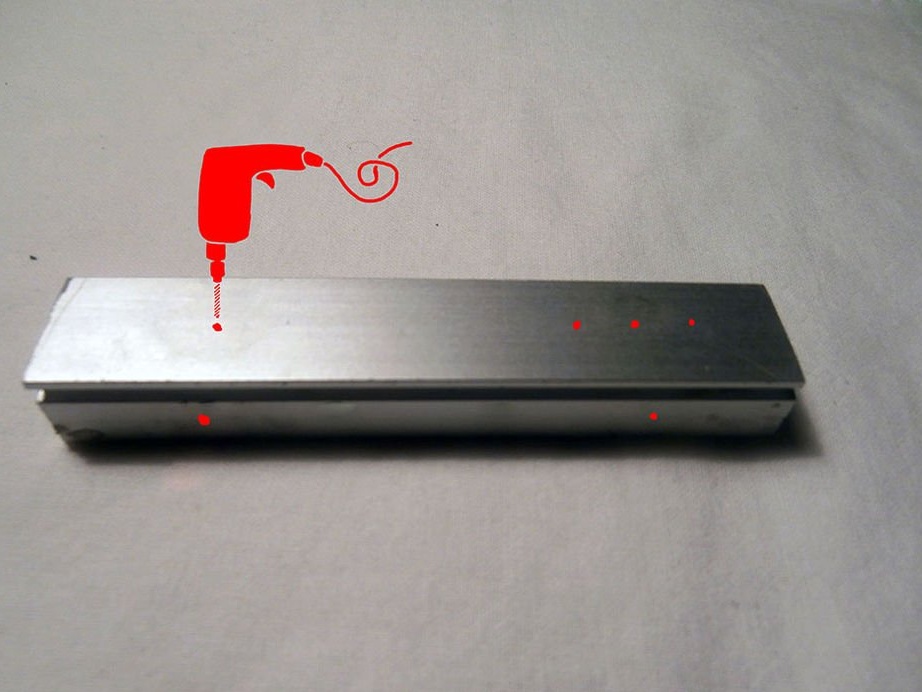
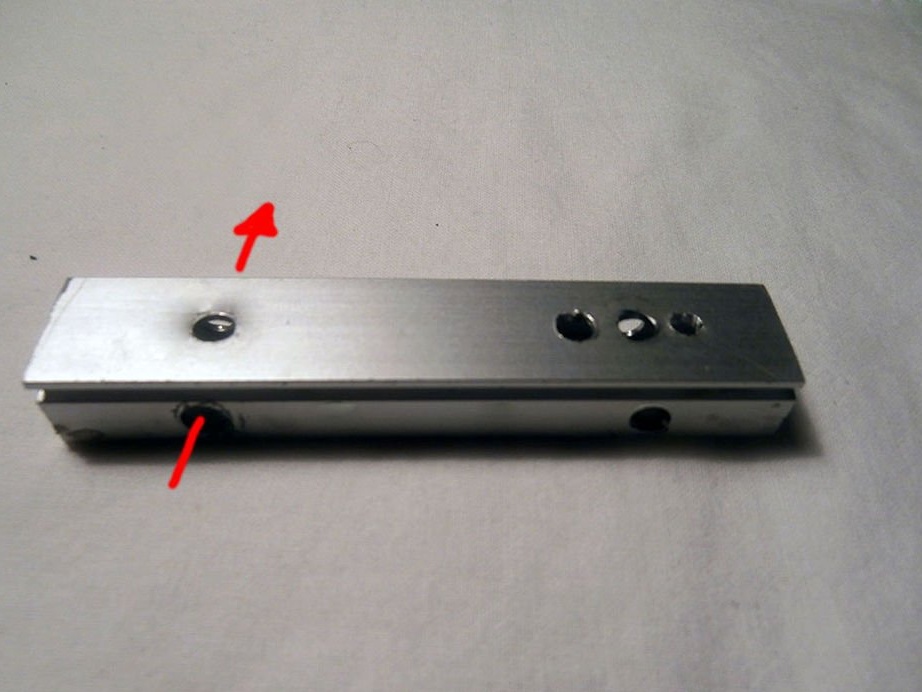
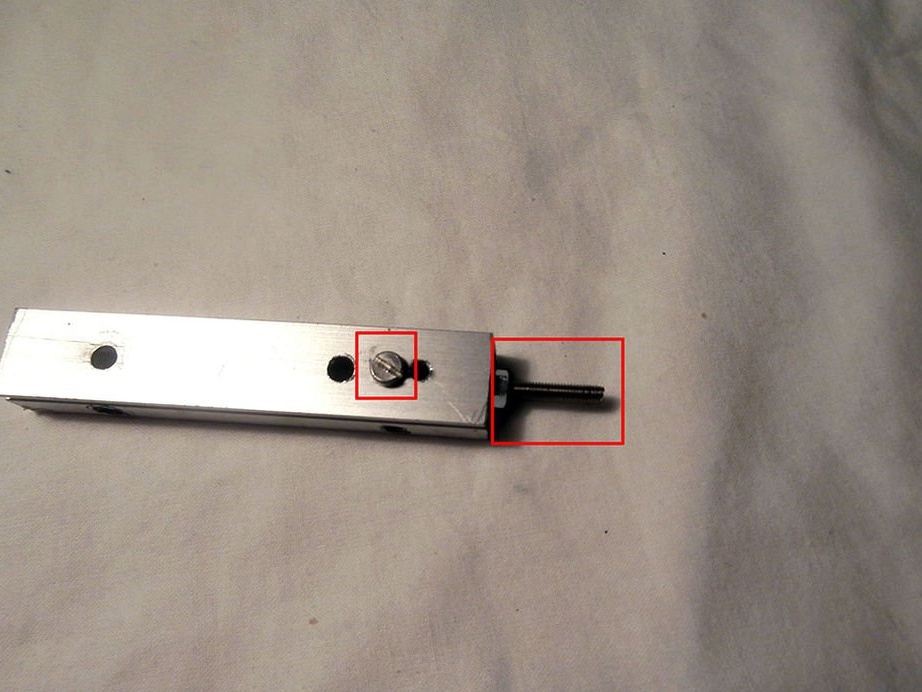
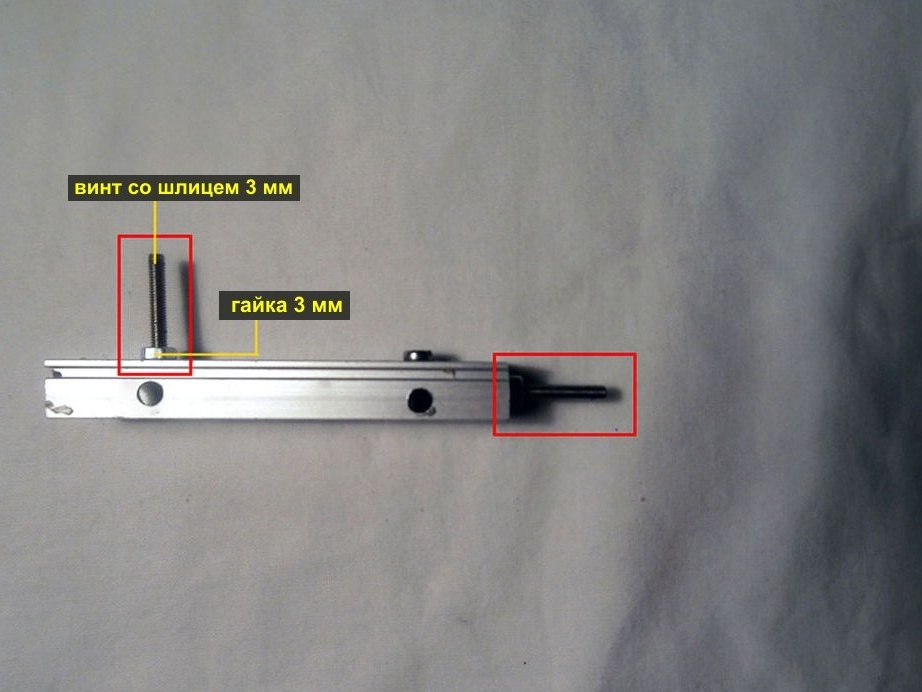
Passaggio 5: alloggiamento


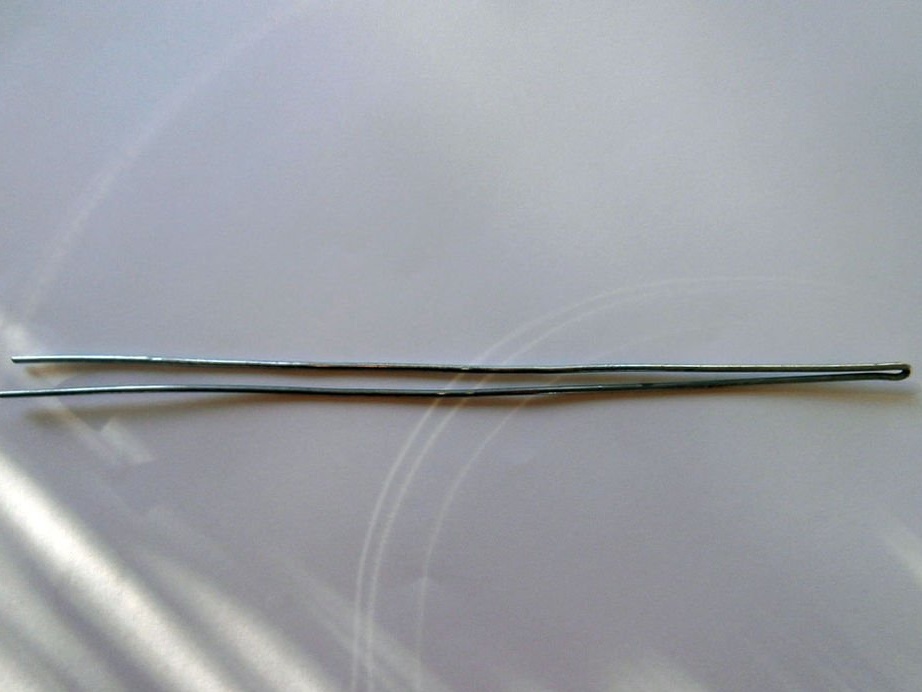
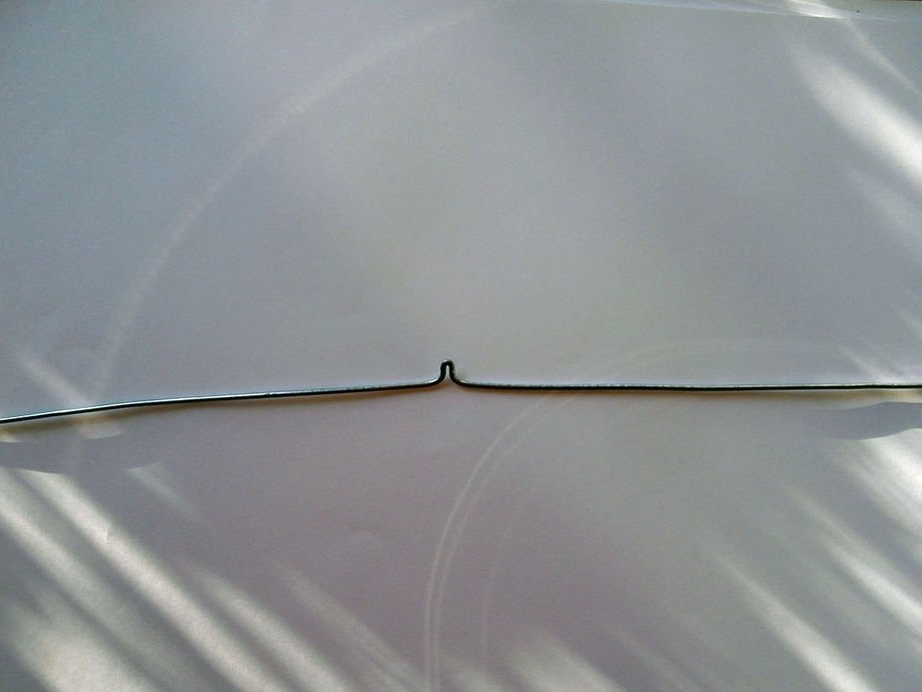
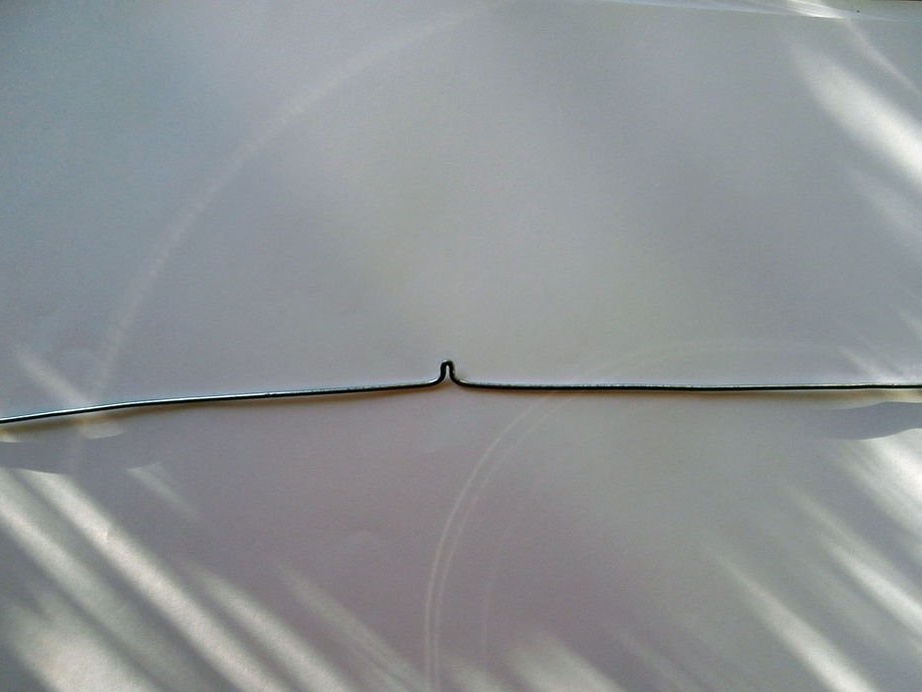
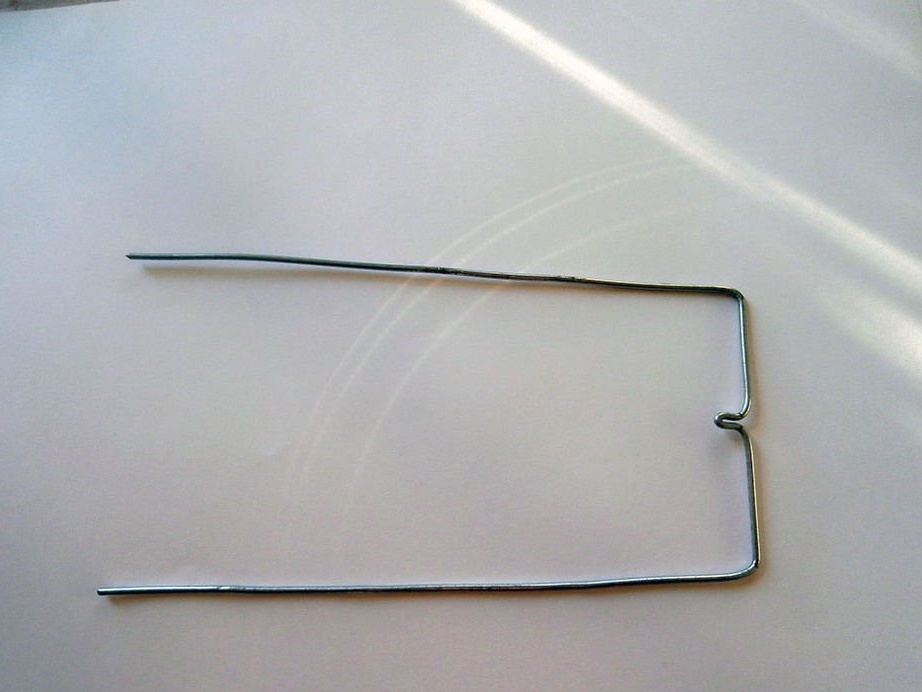
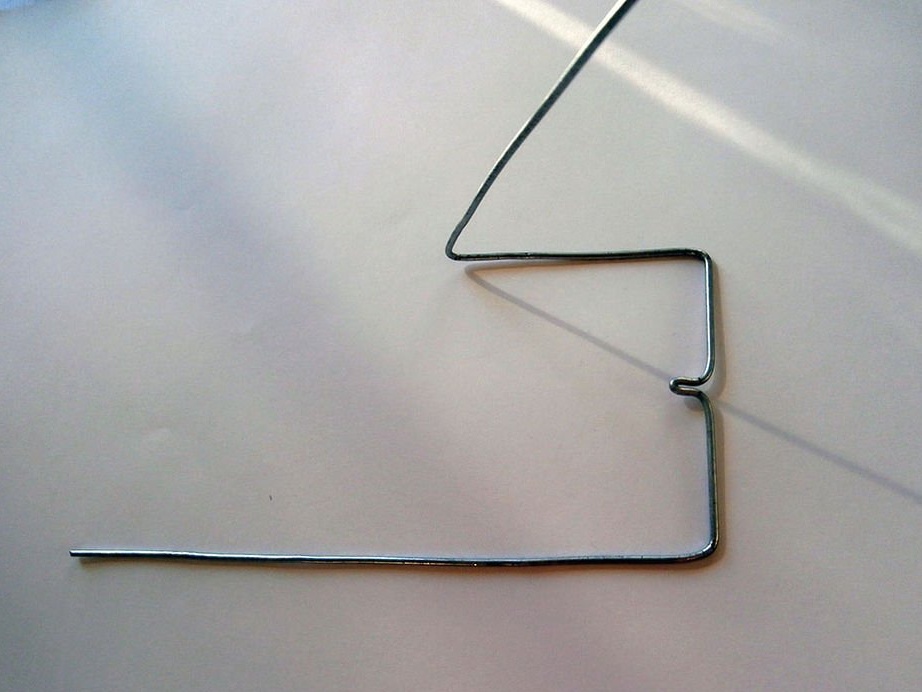
Passaggio 6: gambe anteriori
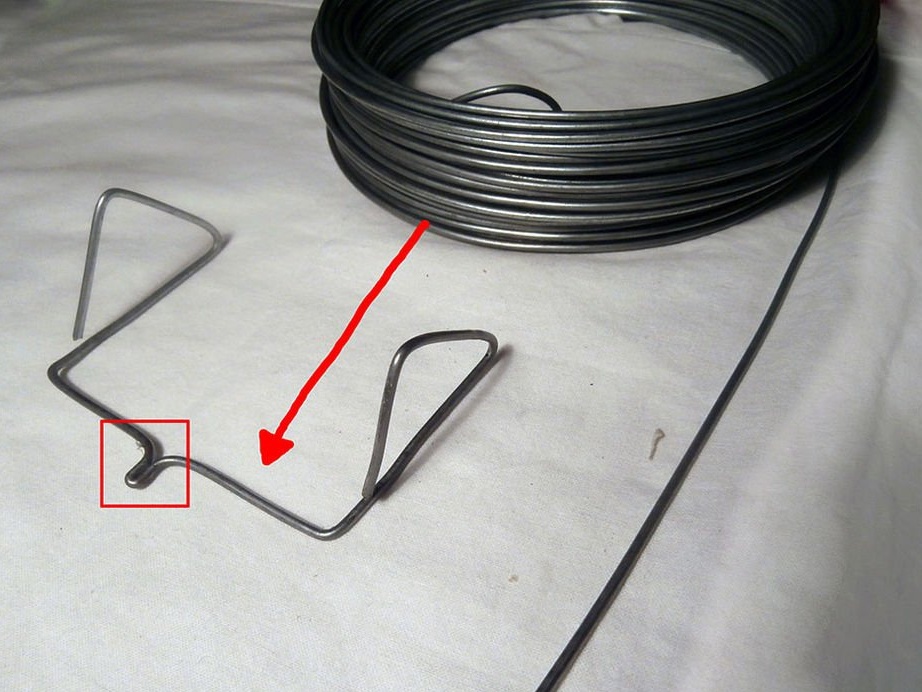
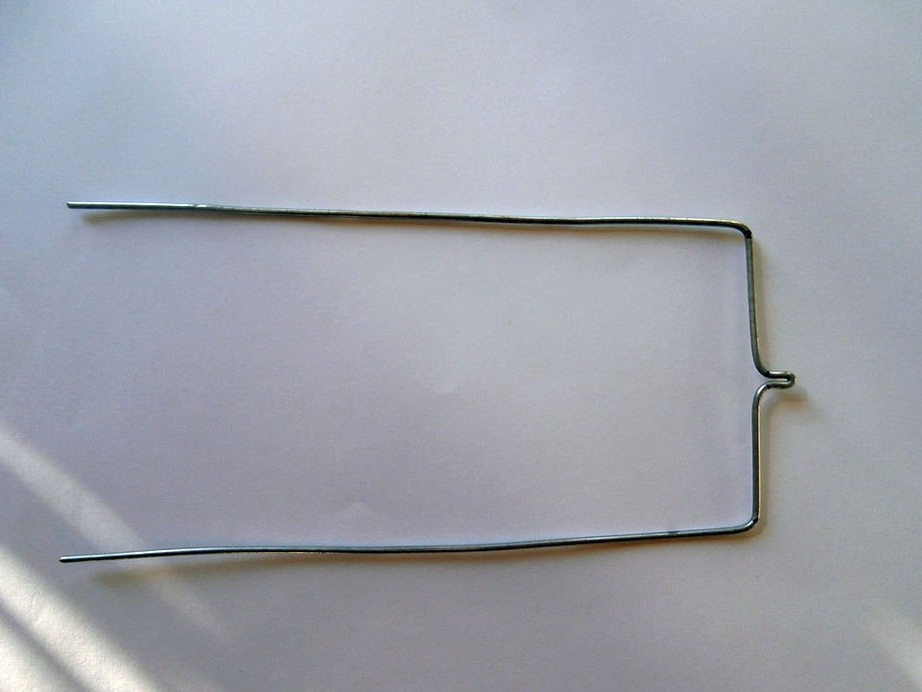
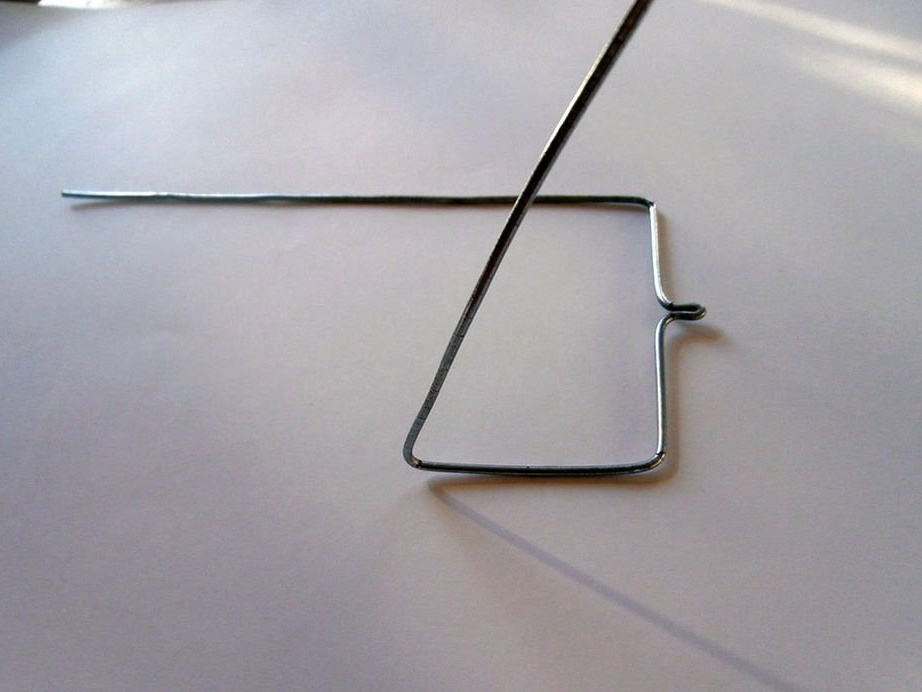
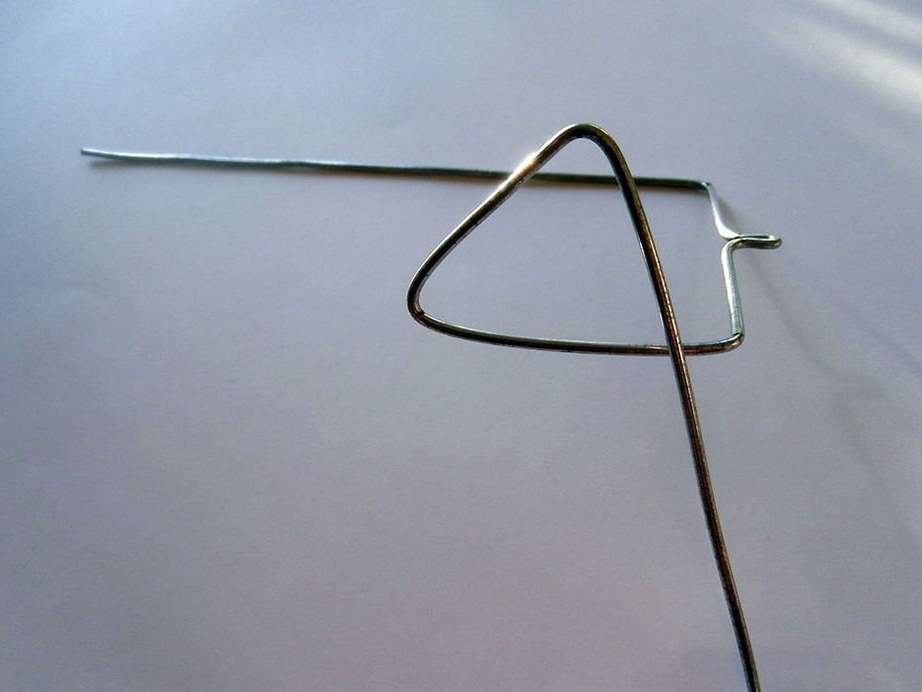
Passaggio 7: zampe posteriori
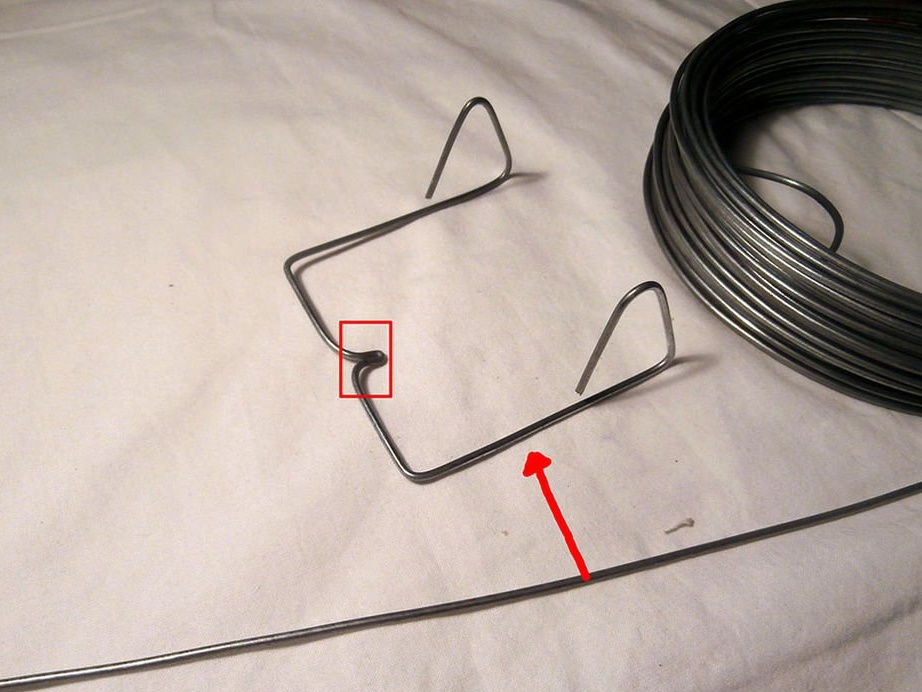
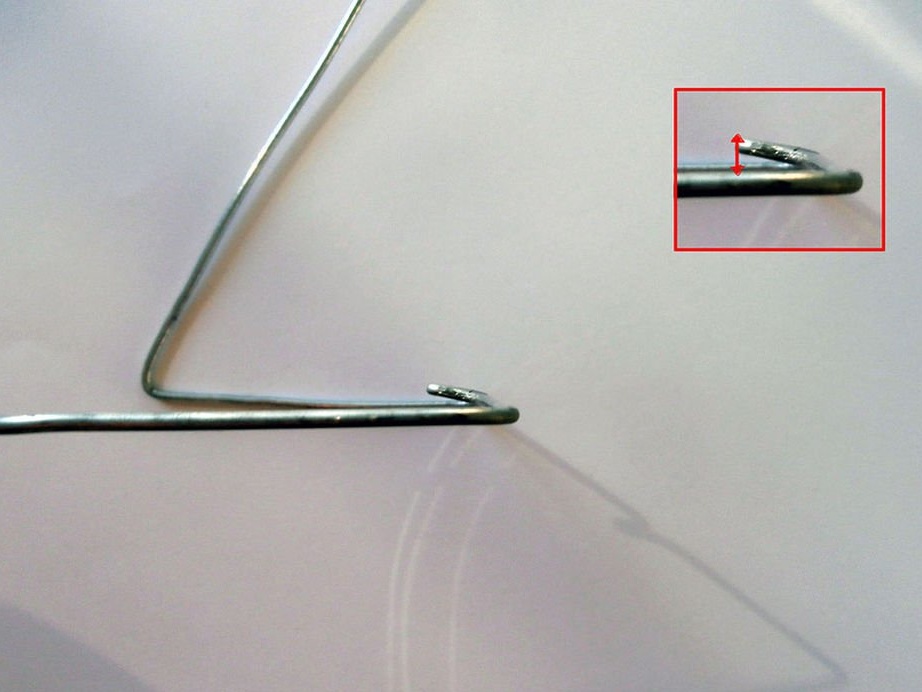
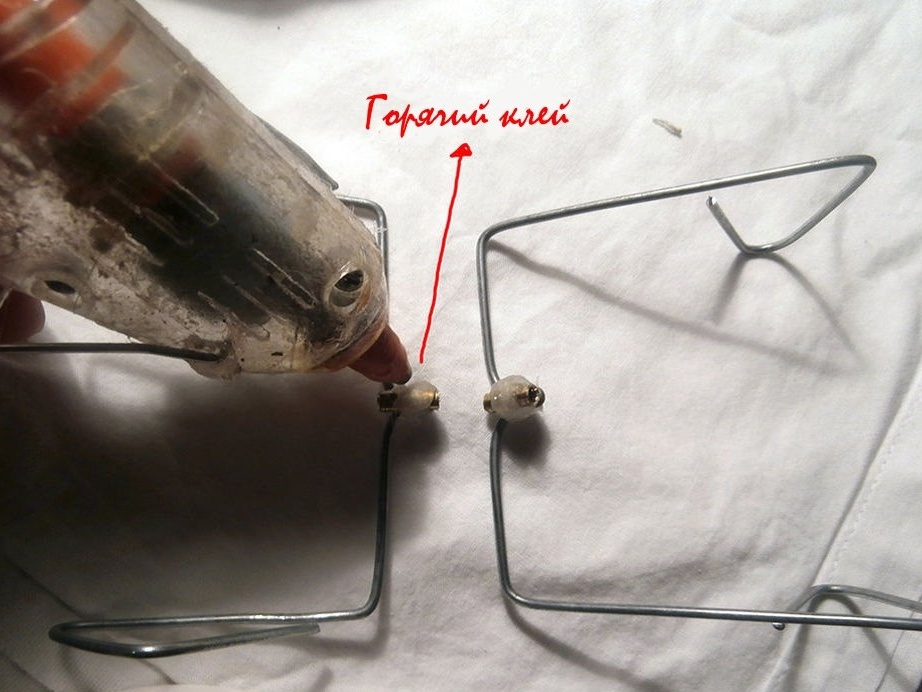
Passaggio 8: collegamento dei piedi
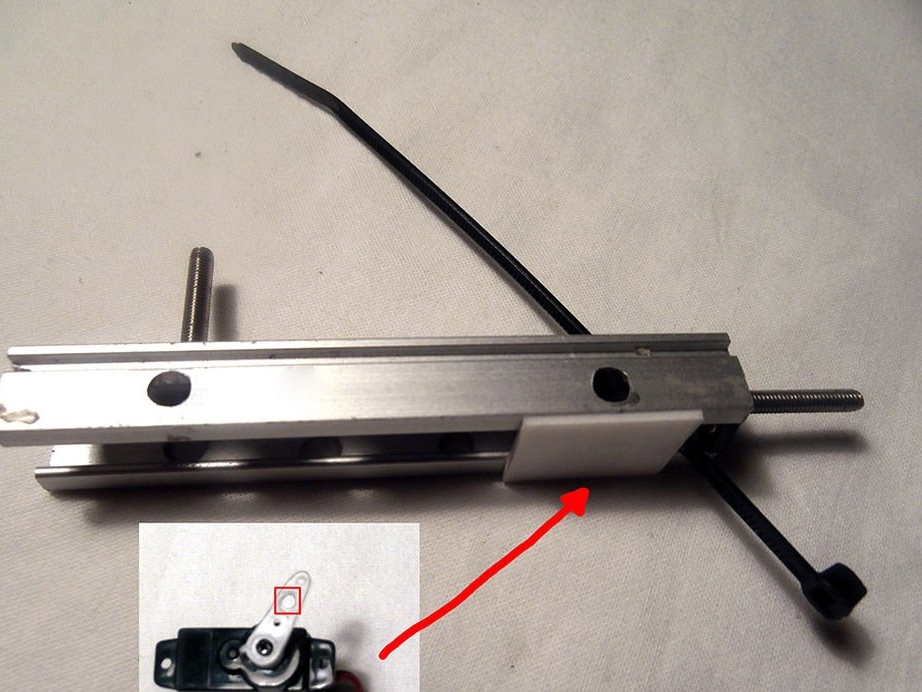
Passaggio 9: frizione
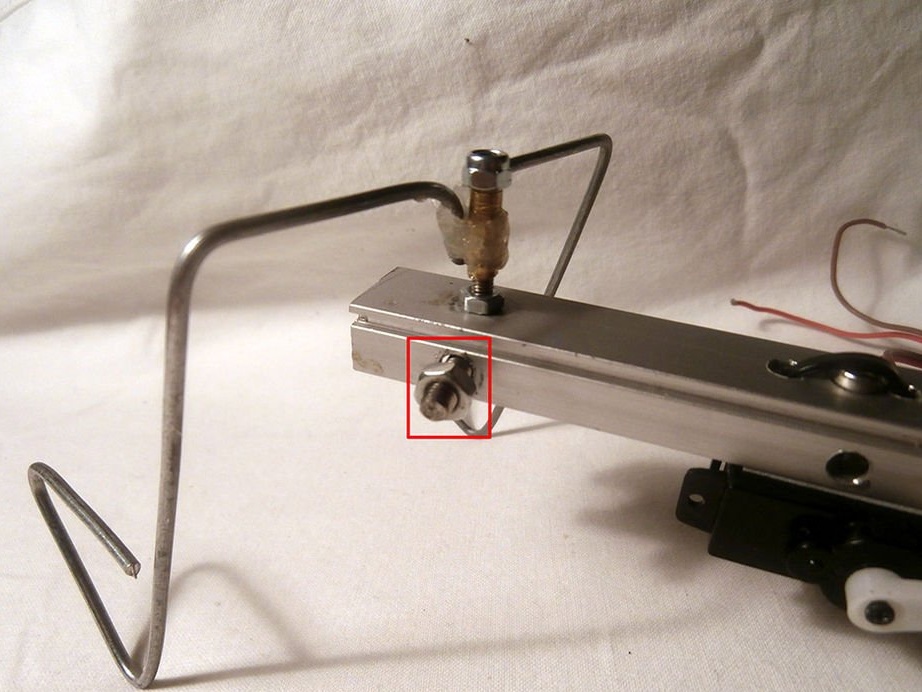
Passaggio 10: supporto frizione
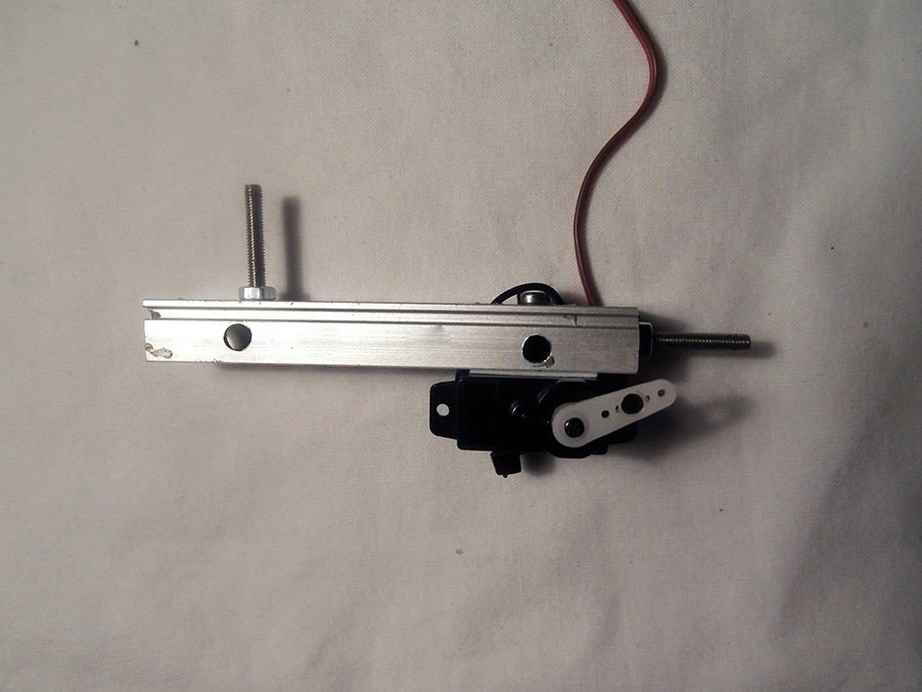
Step 11: gli ultimi ritocchi
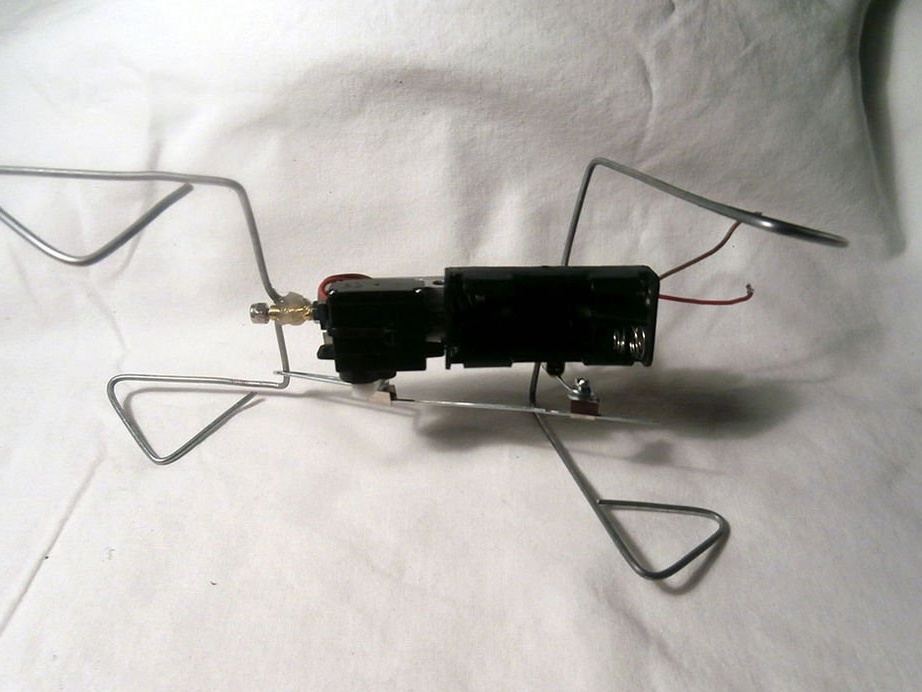
Alla fine, basta collegare il servo e le batterie e il robot Il gufo inizierà un viaggio intorno alla tua casa :)