


Il controller PWM è progettato per controllare la velocità di rotazione del motore polare, la luminosità della lampadina o la potenza dell'elemento riscaldante.
vantaggi:
1 facilità di fabbricazione
2 Disponibilità dei componenti (il costo non supera i $ 2)
3 Uso diffuso
4 Per i principianti, esercitati ancora una volta e per favore =)
Una volta avevo bisogno di un "dispositivo" per regolare la velocità di rotazione del dispositivo di raffreddamento. Perché non ricordo esattamente. Fin dall'inizio ho provato attraverso un normale resistore variabile, faceva molto caldo e questo non era accettabile per me. Di conseguenza, scavando su Internet ho trovato un circuito sul già noto chip NE555. Questo era uno schema di un controller PWM convenzionale con un ciclo di lavoro (durata) di impulsi pari o inferiore al 50% (fornirò grafici su come funziona in seguito). Il circuito si rivelò molto semplice e non richiedeva alcuna regolazione, l'importante era non disturbare la connessione di diodi e un transistor. La prima volta che lo ha assemblato su una breadboard e testato, ha funzionato per mezzo giro. Più tardi ho già separato un piccolo circuito e tutto sembrava più pulito =) Bene, ora diamo un'occhiata al circuito stesso!
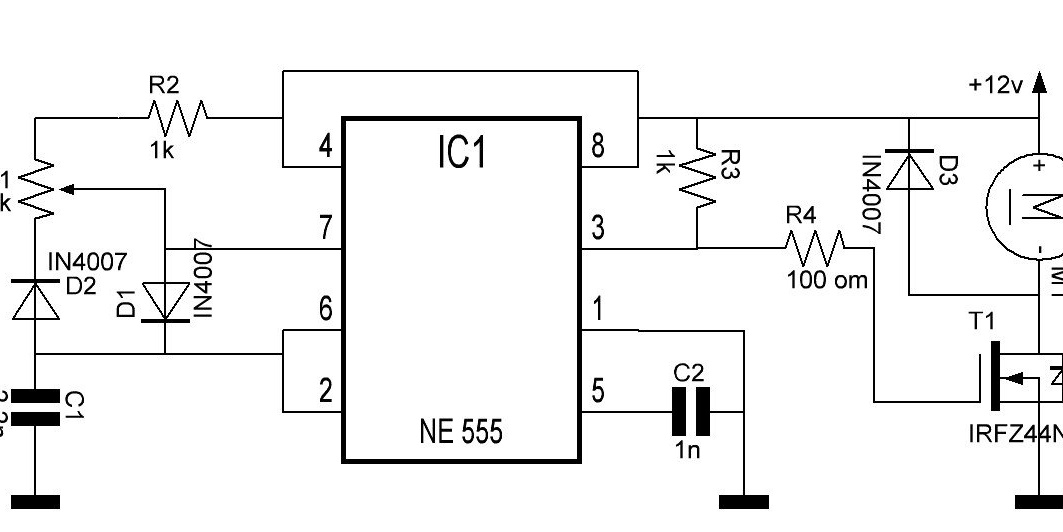
Circuito controller PWM
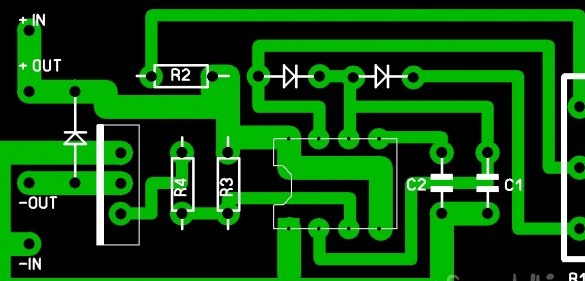
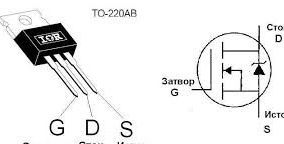
Da esso vediamo che questo è un normale generatore con un controller del duty cycle assemblato secondo lo schema di un foglio dati. E cambiamo questo ciclo di lavoro con la resistenza R1, la resistenza R2 funge da protezione contro il corto circuito, poiché il 4 pin del microcircuito è collegato a terra tramite il tasto interno del timer e quando si trova nella posizione estrema R1, si chiude semplicemente. R3 è una resistenza pull-up. C2 è un condensatore di impostazione della frequenza. IRFZ44N è un mosfet a canale N. D3 è un diodo protettivo che impedisce il fallimento del campo durante la rottura del carico. Ora un po 'sul ciclo di lavoro degli impulsi. La frequenza degli impulsi è il rapporto tra il suo periodo di ripetizione (ripetizione) e la durata dell'impulso, cioè dopo un certo periodo di tempo, ci sarà una transizione da (approssimativamente parlando) più a meno, o piuttosto da un'unità logica a zero logico. Quindi questo intervallo di tempo tra gli impulsi è lo stesso ciclo di lavoro.
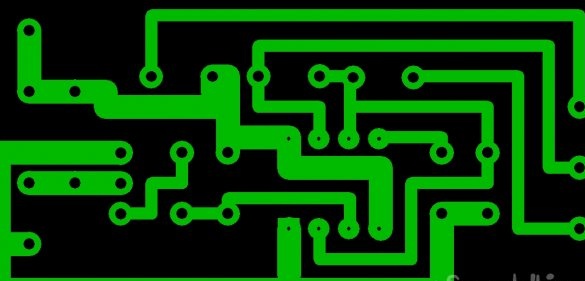
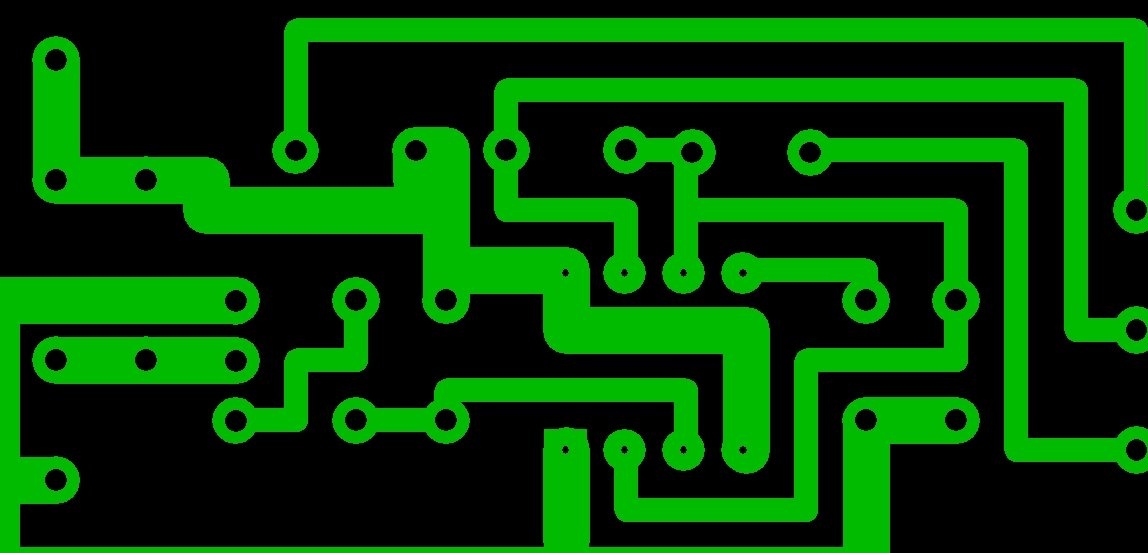
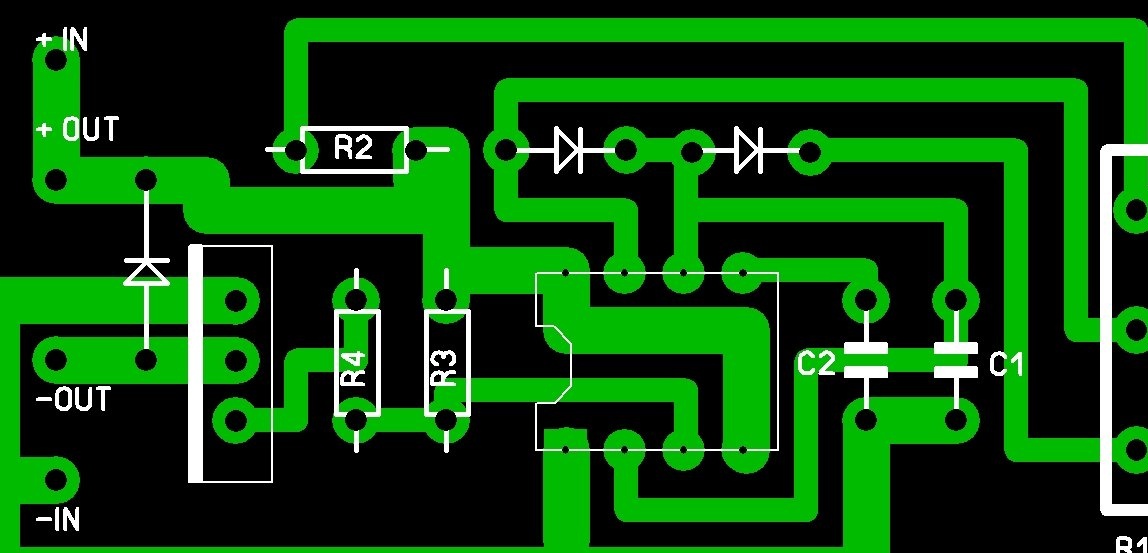
Di seguito è riportato un circuito stampato con la posizione delle parti e senza di esse
Ora un po 'di dettagli e il loro aspetto.Il chip stesso è realizzato in un pacchetto DIP-8, condensatori ceramici di piccole dimensioni, resistori da 0,125-0,25 watt. Diodi di rettifica regolari a 1A (il più conveniente è 1N4007 sfuso ovunque). Inoltre, il chip può essere installato sul socket se in futuro si desidera utilizzarlo in altri progetti e non saldarlo di nuovo. Di seguito sono le foto dei dettagli.




P.S: la classificazione dei condensatori può variare da 2,2 nanofarad a 4,7 nanofarad. La resistenza del resistore R4 è di 47-180 ohm.
P.P.S: Ho usato questo controller PWM per controllare: regime del motore, luminosità della lampadina e temperatura dell'elemento riscaldante.
Auguro a tutti un successo creativo, grazie per l'attenzione!
Da esso vediamo che questo è un normale generatore con un controller del duty cycle assemblato secondo lo schema di un foglio dati. E cambiamo questo ciclo di lavoro con la resistenza R1, la resistenza R2 funge da protezione contro il corto circuito, poiché il 4 pin del microcircuito è collegato a terra tramite il tasto interno del timer e quando si trova nella posizione estrema R1, si chiude semplicemente. R3 è una resistenza pull-up. C2 è un condensatore di impostazione della frequenza. IRFZ44N è un mosfet a canale N. D3 è un diodo protettivo che impedisce il fallimento del campo durante la rottura del carico. Ora un po 'sul ciclo di lavoro degli impulsi. La frequenza degli impulsi è il rapporto tra il suo periodo di ripetizione (ripetizione) e la durata dell'impulso, cioè dopo un certo periodo di tempo, ci sarà una transizione da (approssimativamente parlando) più a meno, o piuttosto da un'unità logica a zero logico. Quindi questo intervallo di tempo tra gli impulsi è lo stesso ciclo di lavoro.
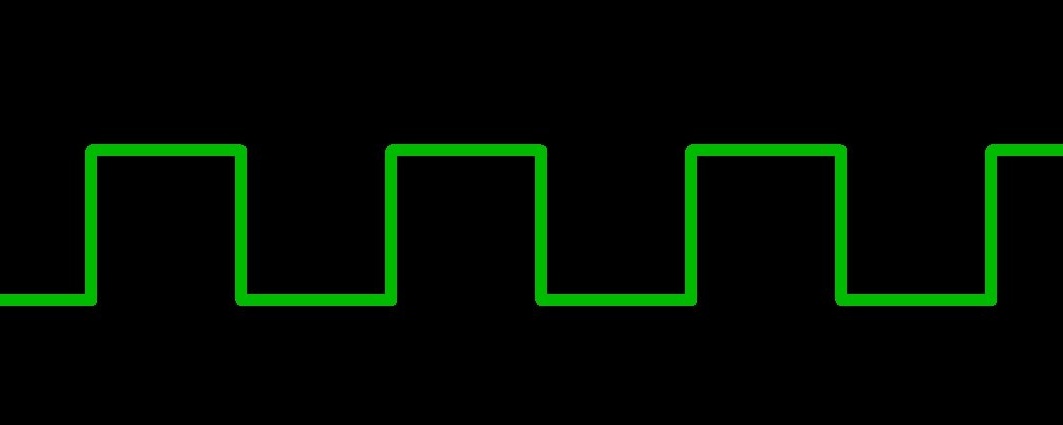
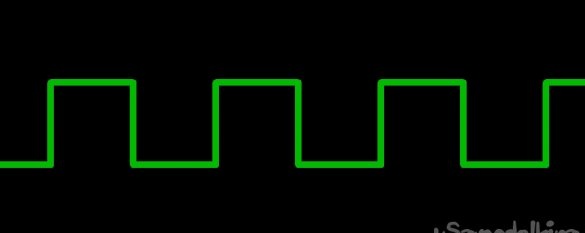
Rapporto di servizio nella posizione centrale R1
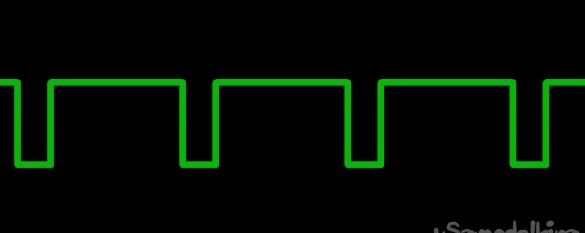
Rapporto di servizio nella posizione più a sinistra R1
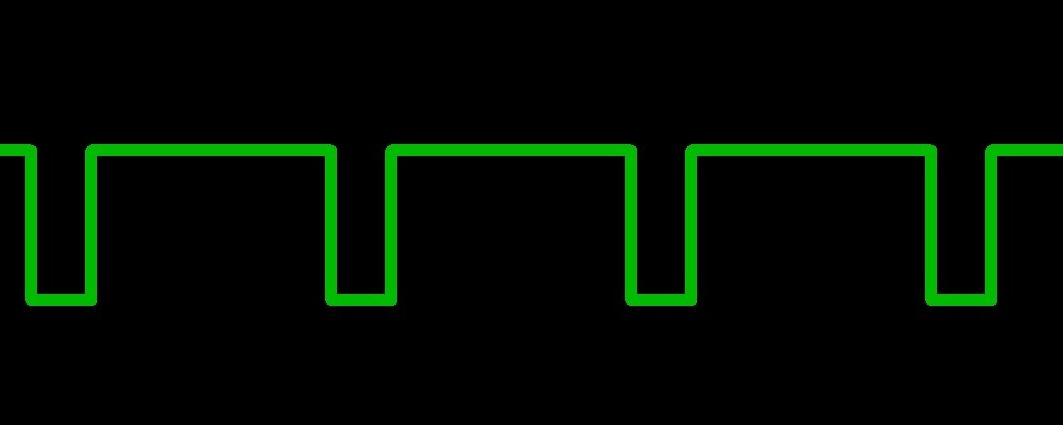
Rapporto di servizio all'estrema destra posizione R
Di seguito è riportato un circuito stampato con la posizione delle parti e senza di esse
Ora un po 'di dettagli e il loro aspetto.Il chip stesso è realizzato in un pacchetto DIP-8, condensatori ceramici di piccole dimensioni, resistori da 0,125-0,25 watt. Diodi di rettifica regolari a 1A (il più conveniente è 1N4007 sfuso ovunque). Inoltre, il chip può essere installato sul socket se in futuro si desidera utilizzarlo in altri progetti e non saldarlo di nuovo. Di seguito sono le foto dei dettagli.
P.S: la classificazione dei condensatori può variare da 2,2 nanofarad a 4,7 nanofarad. La resistenza del resistore R4 è di 47-180 ohm.
P.P.S: Ho usato questo controller PWM per controllare: regime del motore, luminosità della lampadina e temperatura dell'elemento riscaldante.
Auguro a tutti un successo creativo, grazie per l'attenzione!