
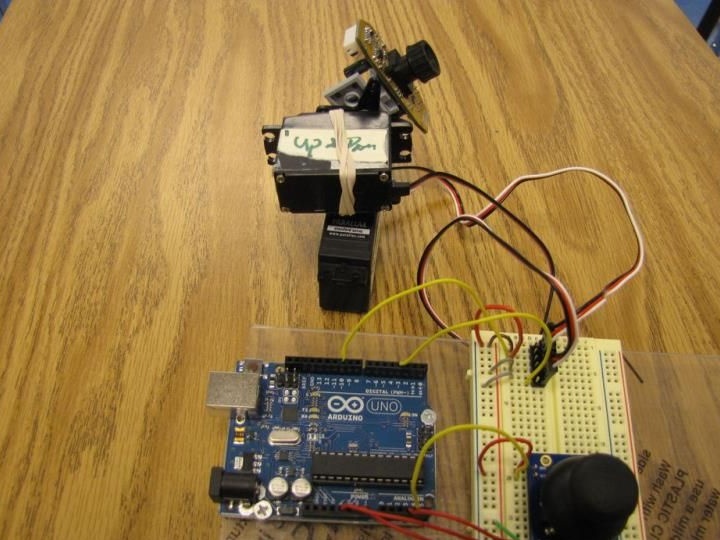
Materiali e strumenti:
- microcontrollore Arduino (in questo prodotto fatto in casa applica Arduino Uno Rev 3);
- Due servi da Parallax;
- joystick (anche di Parallax);
- circuito stampato) piccolo);
- connettori per collegamento;
- Un dispositivo per tracciare il movimento dei servomotori (vengono utilizzati una webcam rotta e cubi lego).
Processo di assemblaggio fatto in casa:
Primo passo. Colleghiamo i servomotori
Il processo di assemblaggio fatto in casa inizia con il collegamento dei servomotori. Per assemblare un layout preliminare, viene utilizzato un circuito stampato. Quindi sarà possibile creare uno scudo separato. Nella figura puoi vedere come è esattamente collegato tutto.
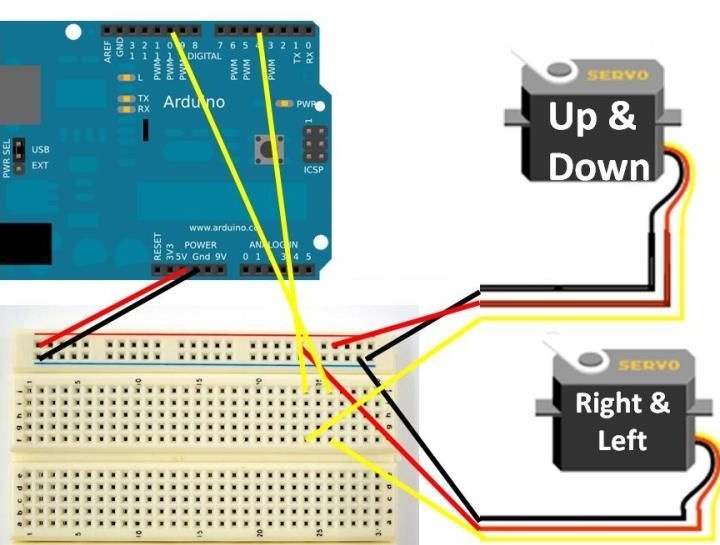
Il cavo rosso è l'alimentazione, si collega al pin 5V sul controller Arduino.
Il filo nero è un meno (terra), si collega all'uscita Arduino chiamata GND.
Il cavo giallo del servomotore destro e sinistro deve essere collegato al pin 11. In alcuni modelli, può essere bianco.
Un cavo Up & Down giallo simile deve essere collegato al pin 4. Può anche essere bianco su alcuni modelli di motore.
È importante ricordare che i connettori di segnale utilizzati per controllare il motore provengono dalle uscite PWM.
Secondo passo Collega il joystick
Come è collegato il joystick è visibile in figura. Inizialmente, lo schema può sembrare piuttosto complicato, ma in realtà non c'è nulla di complicato qui. Come per i motori, qui viene utilizzata una scheda di cablaggio.
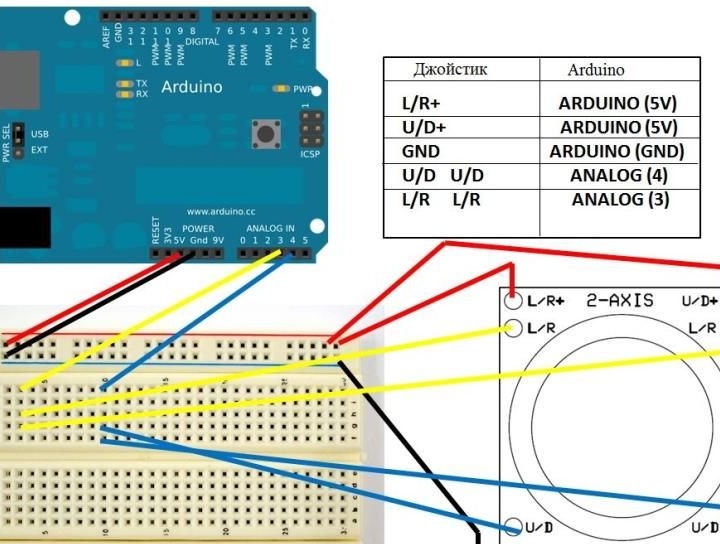
1. Sul modulo joystick, è possibile trovare le uscite U / R + e L / R +. Attraverso queste uscite, l'alimentazione è collegata. Di conseguenza, è necessario applicare una tensione di + 5 V dal pin corrispondente ad Arduino.
2. Ci sono anche due connettori sotto il joystick chiamati L / R e due connettori U / D. Devono essere collegati alle uscite analogiche A3 e A4.
3. Bene, in conclusione, la terra sul joystick deve essere collegata alla terra sull'Arduino.
Dopo il montaggio, la connessione deve essere ricontrollata. È a causa di errori di connessione che nella maggior parte dei casi sorgono problemi. Ciò è particolarmente vero quando viene utilizzato un circuito stampato e ci sono molte connessioni su di esso.
Terzo passoBozzetto per Arduino
Il codice è molto semplice e contiene commenti dettagliati. Il codice sopra deve solo essere copiato nell'IDE di Arduino. Una volta caricato il codice, i motori non dovrebbero muoversi. Dovrebbero iniziare a muoversi solo quando viene premuto il pulsante sul joystick.
Problemi che possono sorgere e come risolverli
1. Se i motori non si accendono, ricontrollare la connessione. Le uscite PWM vengono utilizzate per collegare i motori e le uscite analogiche vengono utilizzate per collegare i joystick.
2. Succede che subito dopo aver caricato il codice, i motori iniziano a vibrare. Ciò accade se si collegano in modo errato i pin U / D + L / R +. La connessione deve essere controllata attentamente. Per non bruciare la scheda durante il test, è necessario scollegarla dal computer.
3. Se tutto viene ricontrollato, ma i motori continuano a non funzionare, è possibile provare a ricollegare il joystick. Deve essere rimosso dal circuito e quindi reinstallato con un certo sforzo. I connettori del joystick dovrebbero andare bene nel layout.
Se tutto è andato a buon fine, ora puoi iniziare a creare qualsiasi oggetto fatto in casa con il controllo tramite il joystick. Ad esempio, puoi creare un robot che può essere controllato con un joystick e molto altro.