

Avendo in magazzino tutti i dettagli e gli strumenti di un tale robot, è possibile assemblare in sole 2 ore. Certo, tale il robot Non sostituirà un vero aspirapolvere, ma rimarrai piacevolmente sorpreso dalla quantità di polvere che può raccogliere da un pavimento apparentemente pulito.
materiali:
- Arduino
- Modulo di controllo del motore Motor-shield (H-Bridge)
- Due motori con ingranaggi
- Un paio di ruote
- Power bank 5 volt o altra fonte di alimentazione
- Girante di raffreddamento per un computer di 5 volt (non una ventola)
- Magneti potenti
- Cavo USB
- Cavo di alimentazione per Arduino
- Cavi per collegare i pin Arduino
- Cartone spesso
- pistola per colla
- Un pezzo di latta (ad esempio, da una lattina)
- Scatola di plastica (funge da contenitore per la polvere)

Sul cartone viene determinata approssimativamente la posizione delle parti e viene ritagliato un cerchio di dimensioni adeguate (telaio dell'aspirapolvere).
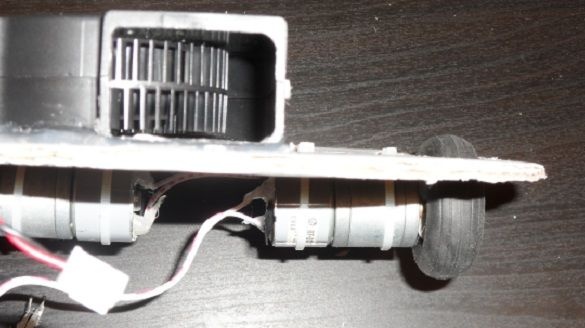
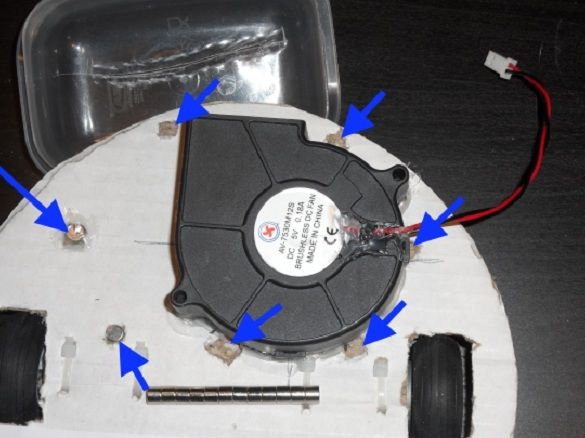
Nella parte inferiore del futuro robot, vengono praticati dei fori sotto le ruote e sotto la turbina. I motori sono fissati al cartone con fascette di plastica.

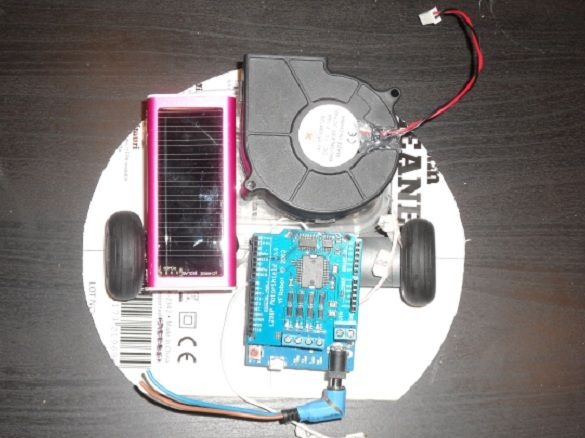
Inoltre, una turbina è fissata al telaio con adesivo hot melt.
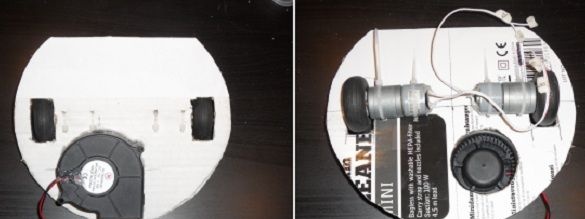
Si scopre che la turbina si trova sulla parte superiore del cartone, i motori sono nella parte inferiore.
Il contorno della scatola di plastica (che raccoglierà polvere) è contrassegnato sul lato inferiore, l'autore fa dei fori attorno a questo contorno e nota la posizione dei magneti. I magneti terranno la scatola sul telaio.
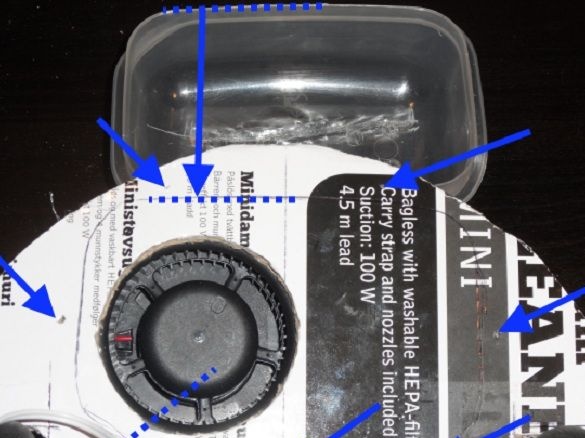
Sul lato superiore del telaio, i magneti sono incollati nelle posizioni precedentemente contrassegnate.
Ora, con i magneti applicati dal basso, pre-posizionando un foglio di carta sotto di essi.

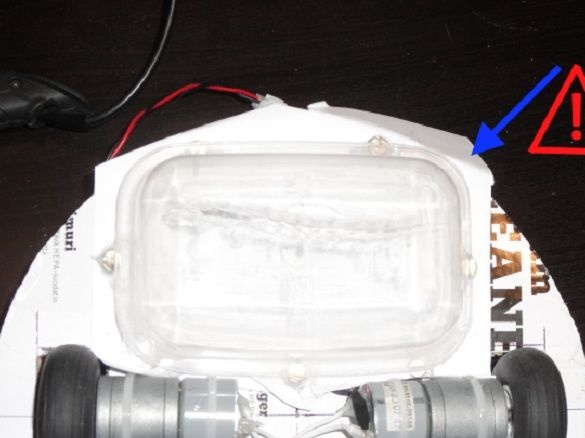
Una scatola di polvere è installata tra i magneti e incollata ad essi.
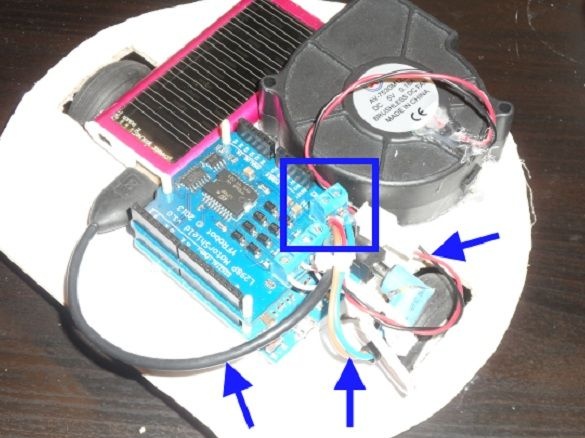
Inoltre, la batteria e i supporti per l'Arduino sono già incollati sul lato superiore del cartone. L'autore utilizza pezzi di spiedini di legno come elementi di fissaggio.

Ora puoi installare Motor Shield e Arduino nei supporti. I cavi di alimentazione e Arduino sono tagliati su misura. Si consiglia di saldare e isolare i cavi di alimentazione. Quindi sono collegati ad Arduino, turbina, batteria e scudo motore.
Dalle strisce di cartone esistente, i paraurti sono piegati e incollati a semicerchio.

I paraurti sono incollati ai lati del telaio. Inoltre, il telaio è stato preventivamente tagliato un po 'in modo che i paraurti installati possano essere schiacciati su di esso in una collisione.

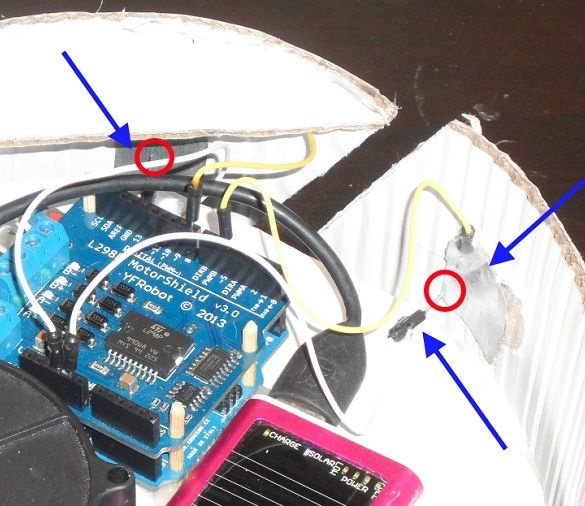
Quindi, prendi due conduttori e collegali con pezzi di stagno con adesivo hot melt.
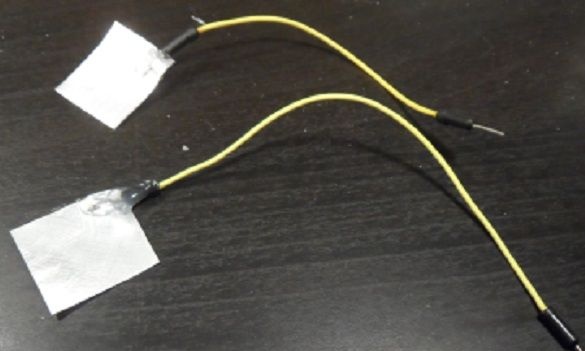
Pezzi di stagno sono incollati ai paraurti e i loro fili sono collegati all'Arduino (ai pin 5 e 8). Inoltre, davanti a loro, la colla fissa i contatti di altri due conduttori che si attaccano ai contatti GND Arduino.
Un rettangolo tagliato da un tovagliolo da cucina viene utilizzato come filtro per la polvere. Il filtro è posizionato nella parte inferiore del telaio e fissato con una scatola di magneti.

Nella scatola, praticare un lungo foro con i bordi curvi verso l'esterno. Inoltre, un supporto arrotondato (pezzo di plastica) è incollato alla scatola in modo che il bordo del foro sia 1 mm sopra il pavimento quando il robot si trova su ruote e poggia sul supporto. L'altezza di questo supporto controlla la pervietà del robot.

Le pareti alte della scatola possono essere accorciate incollando magneti.

Programma per motor-shield e Arduino
Esempio di funzionamento dell'aspirapolvere: