


Materiali e strumenti per il montaggio:
- controller rotativo;
- Intel Edison con Arduino Scheda Breakout
- Driver I2C PWM;
- sblocco dell'orologio in tempo reale;
- mini I2C OLED;
- due servi;
- Tre servi con ingranaggi metallici;
- due fili per un servoazionamento lungo 30 cm;
- presa di montaggio per spina;
- interruttore a levetta a due posizioni;
- spazzolino e dentifricio;
- alimentatore per 5V 3A;
- una siringa di plastica;
- dadi e viti;
- dado e barra filettata;
- un pezzo di acrilico trasparente che misura 61 cm x 61 cm x 3 mm;
- compensato di dimensioni 91 cm x 61 cm x 6 mm;
- Stampante 3D.
Processo di assemblaggio del robot:
Primo passo. Parte meccanica
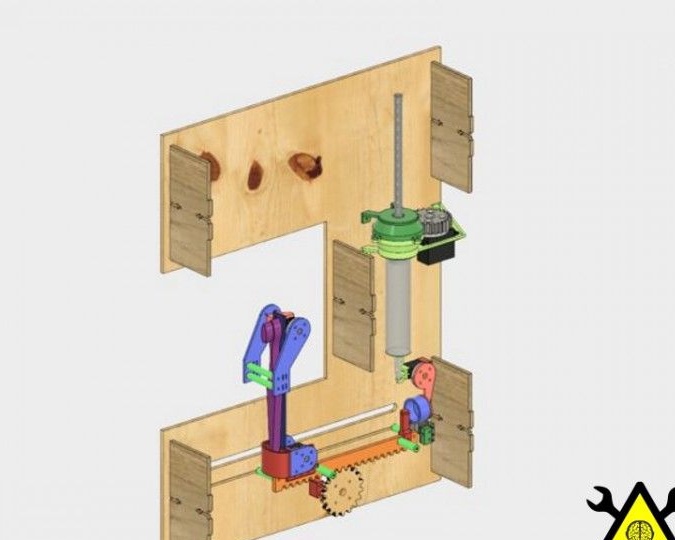
Il dispositivo è stato inizialmente modellato utilizzando una combinazione di Fusion 360 e Illustrator. Nel processo, è stata creata un'intera tecnologia, che include la stampa 3D e il taglio laser del metallo. In totale, il sistema può essere diviso in quattro nodi principali. Ciò include un carrello, un portaspazzolino, un corpo principale e un distributore.
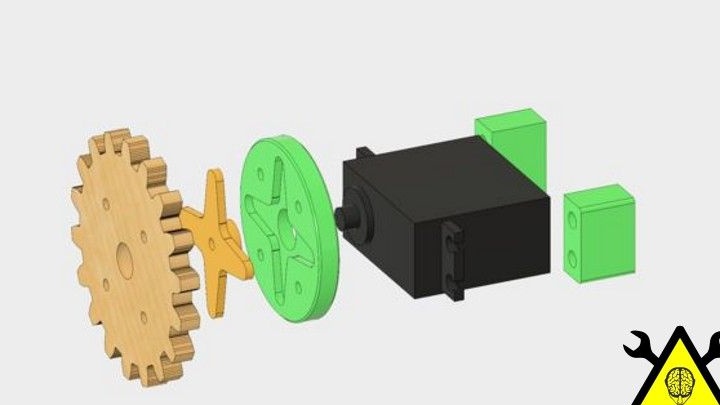
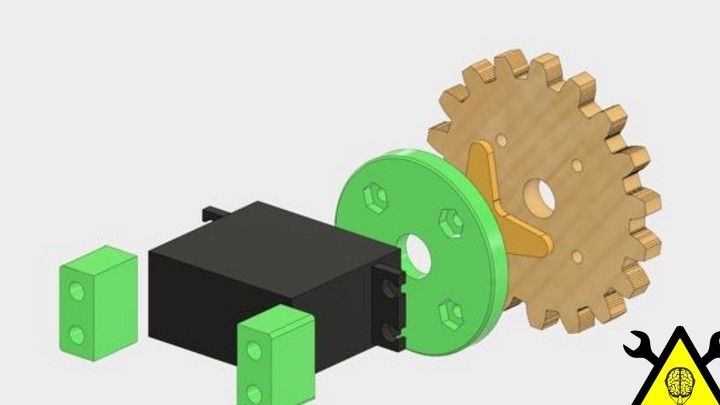
Affinché i prodotti fatti in casa possano essere utilizzati per esigenze più ampie, è stato deciso di modellare gli adattatori per standard e micro-servi. Questi adattatori dispongono di scanalature per il fissaggio di alberi standard, nonché di spazio per quattro dadi sul retro. A causa del fatto che gli adattatori sono stati progettati per alberi, devono essere fissati alle piastre o ad altri oggetti.

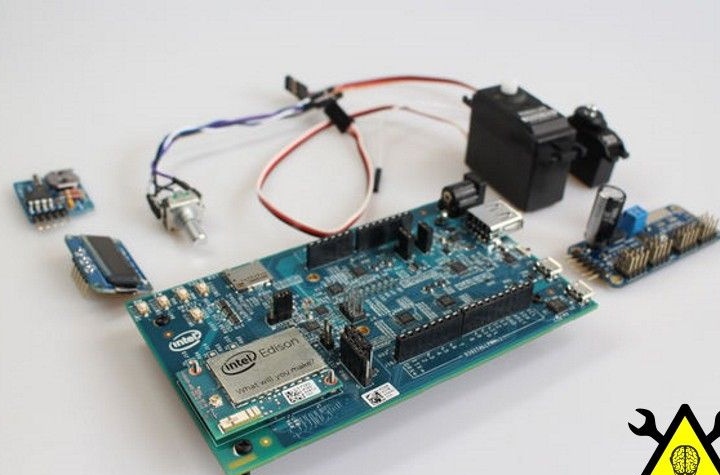
Secondo passo Il circuito elettrico del dispositivo
Una fonte 5V e 3A viene utilizzata come alimentazione. Questo è sufficiente per alimentare un motore. Per quanto riguarda la scheda madre, consuma circa 500 mA e gli azionamenti del motore, il LED originale e l'orologio in tempo reale consumano una piccola quantità di corrente.
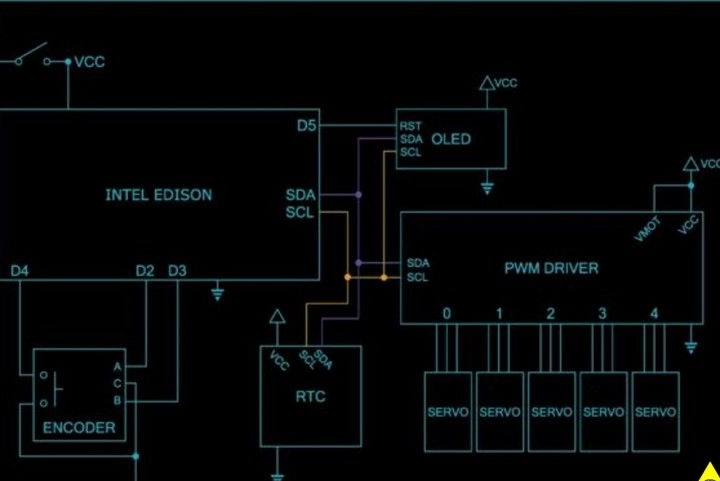
Il processore Intel Edison è utilizzato come controller principale del sistema. Grazie alle schede separate, il processore può comunicare facilmente con altri componenti dell'elettronica. La scheda si collega al motore, all'orologio e allo schermo.
Una scheda PWM viene utilizzata per controllare i cinque servi. La potenza dei motori può essere controllata utilizzando una fonte esterna, ma l'autore ha deciso di legare il Vmot al pin VCC.Grazie a ciò, l'intero sistema è alimentato a 5V.
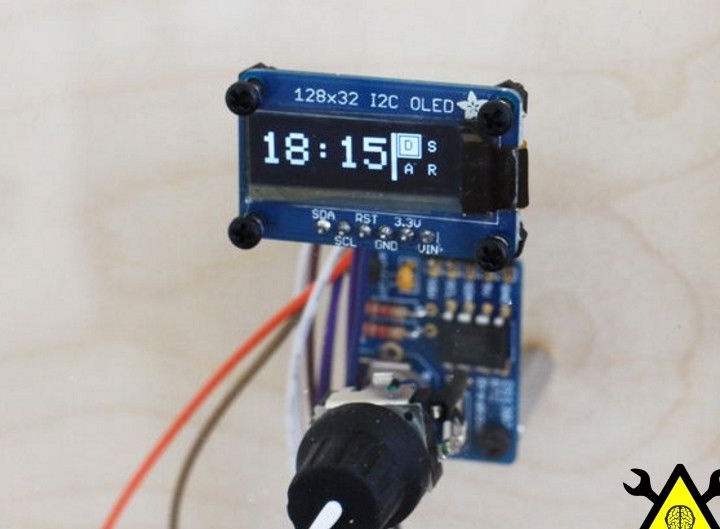
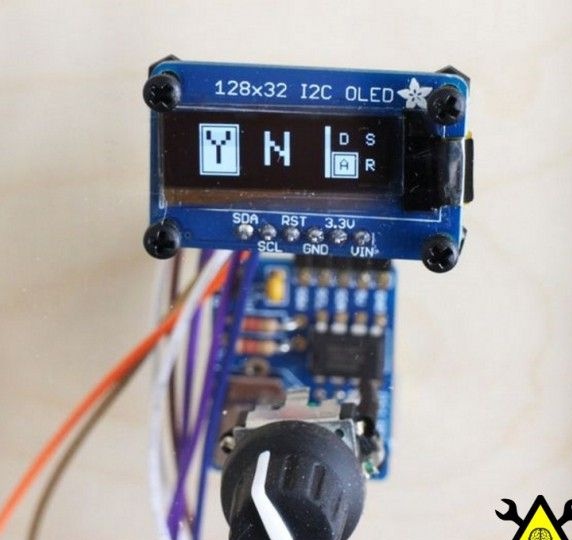
Per poter controllare il dispositivo, viene utilizzato un piccolo display di dimensioni 128 x 32. Un sensore rotante funge da input dell'utente principale. Le uscite del sensore sono collegate ai contatti digitali del processore.
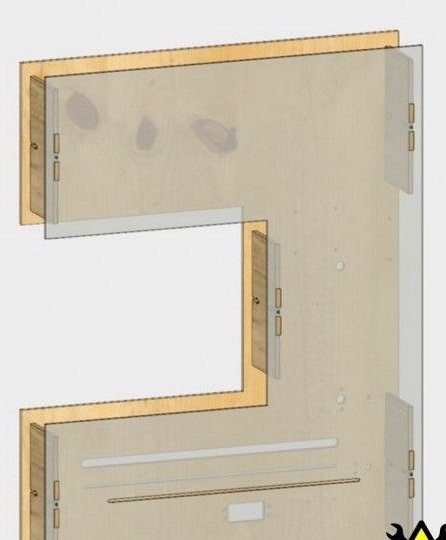
Terzo passo Assemblaggio del corpo
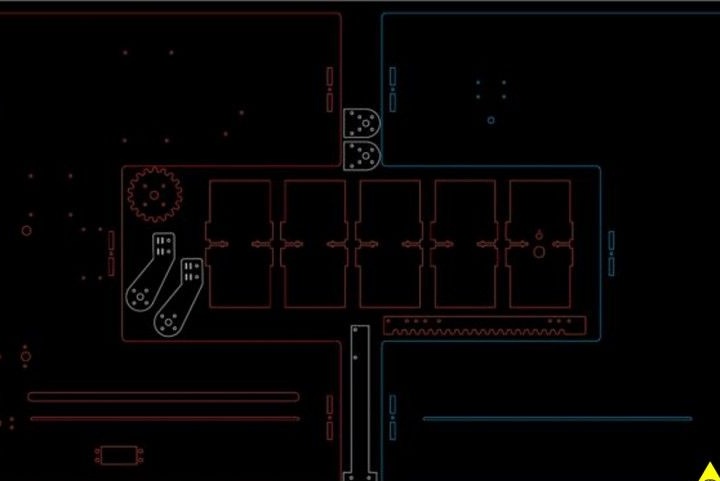
La parte posteriore funge da supporto per la custodia; è realizzata in compensato con uno spessore di 6 mm. Vengono utilizzate quattro viti per fissare PWM e processore. Edison è montato sul lato anteriore e PWM sul retro.
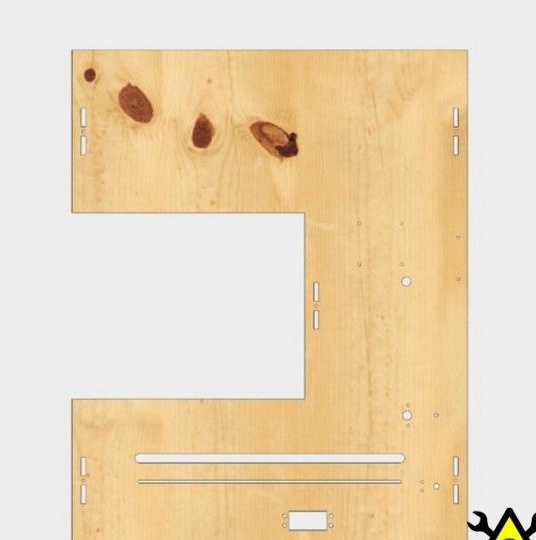
Cinque piastre distanziali vengono utilizzate per collegare i pannelli anteriore e posteriore. I distanziali sono fissati alle piastre con viti e dadi appropriati. Le piastre sono quasi simmetriche, ma le sporgenze su un bordo sono più corte, non si estendono in avanti. L'interruttore, insieme al connettore di alimentazione, è fissato al montante inferiore.

Per quanto riguarda il pannello frontale, è necessario principalmente per proteggere il dispositivo durante il funzionamento. Per fissare lo schermo vengono utilizzate quattro viti; anche il sensore rotante è fissato con dadi.
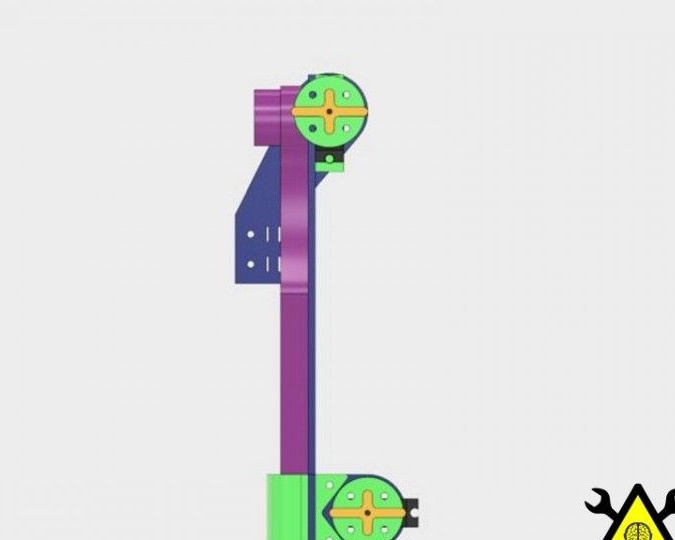
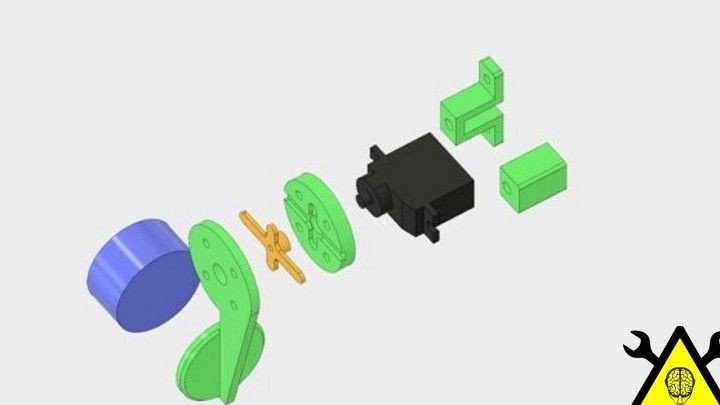
Fase quattro Supporto per spazzolino da denti
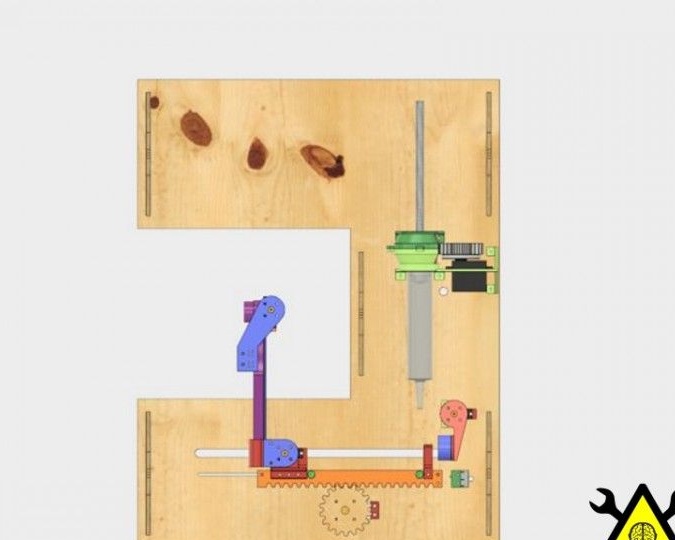
Ci sono due servi sul portaspazzolino, che sono guidati da più unità: la base e la "testa". Nella foto puoi vedere gli elementi di blu e verde. Ciò che è stato tagliato con una taglierina laser è di colore blu e gli elementi stampati su una stampante 3D sono di colore verde.

Grazie alla testa, lo spazzolino non cade. Le mani sono guidate da un singolo servoazionamento, sono fissate con due guarnizioni. Un adattatore 3D e due viti vengono utilizzate per collegare il servomotore alla piastra principale. Ci sono quattro fessure nella piastra, attraverso di esse con l'aiuto di elastici neri è attaccato uno spazzolino da denti.
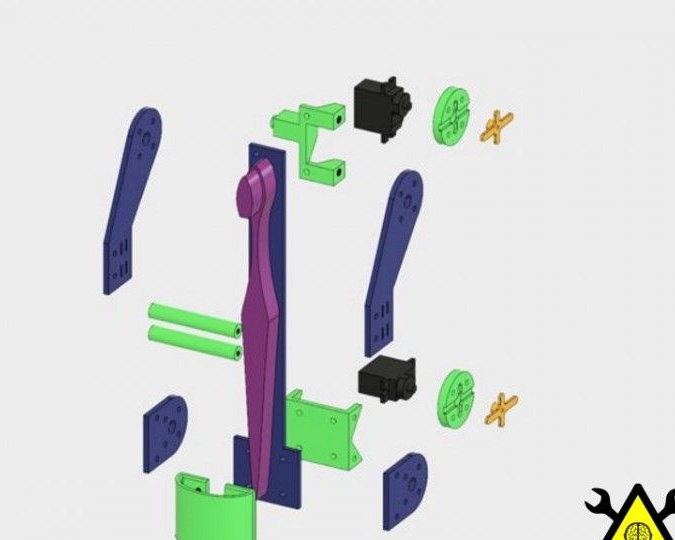
La base è una piccola tazza 3D, impedisce alla spazzola di cadere. Dopo aver caricato lo spazzolino da denti nel gruppo, il servoazionamento lo tiene e si gira verso il basso. Otto viti vengono utilizzate per collegare le piastre.


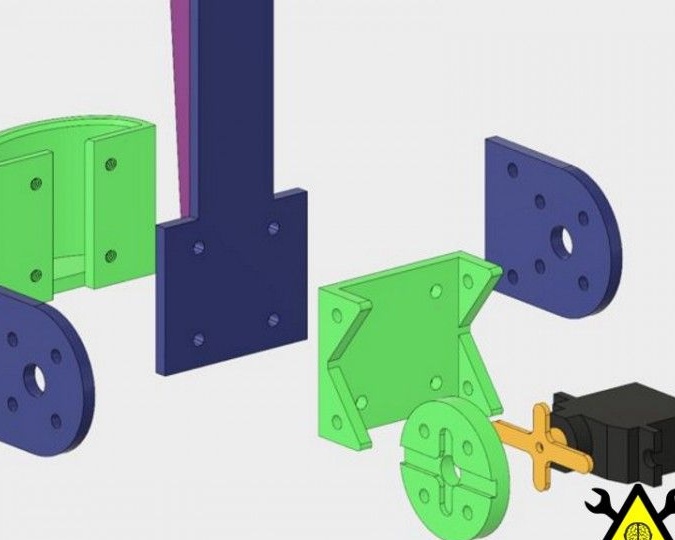
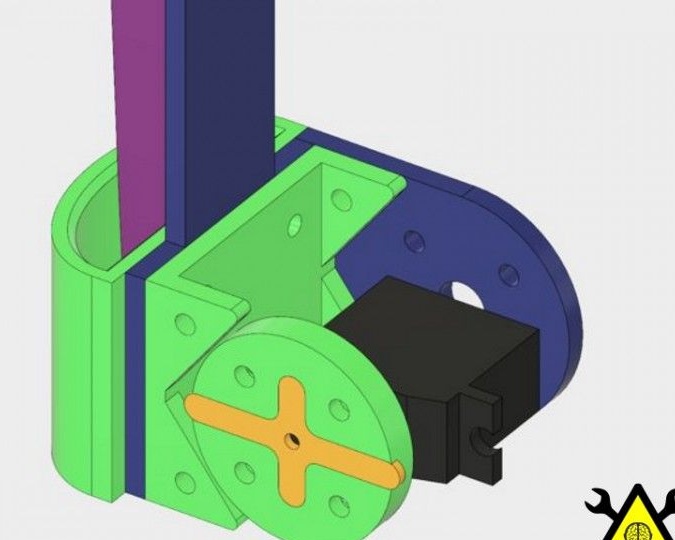
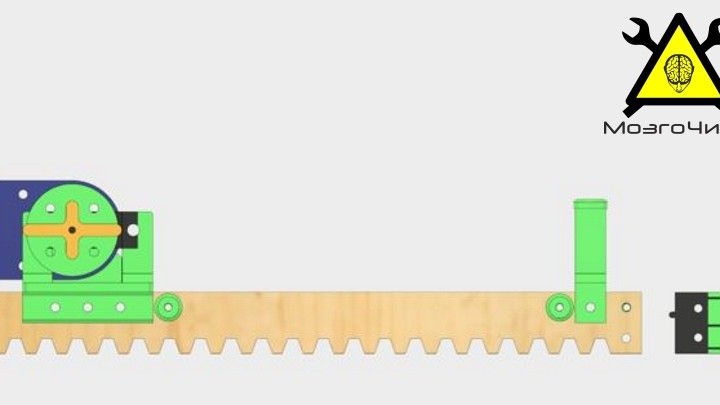
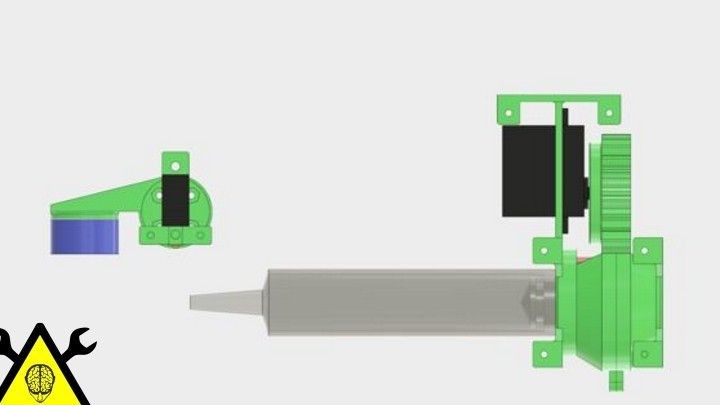
Fase cinque Montaggio su guida
Il telaio è composto da tre parti uniche, poggiatesta, carrello e montanti. Utilizzando il carrello, il supporto del telaio è fissato. Il carrello stesso è fissato con tre viti. Il poggiatesta è necessario per ridurre il carico sul supporto servo principale, è ulteriormente montato sul carrello sul telaio.
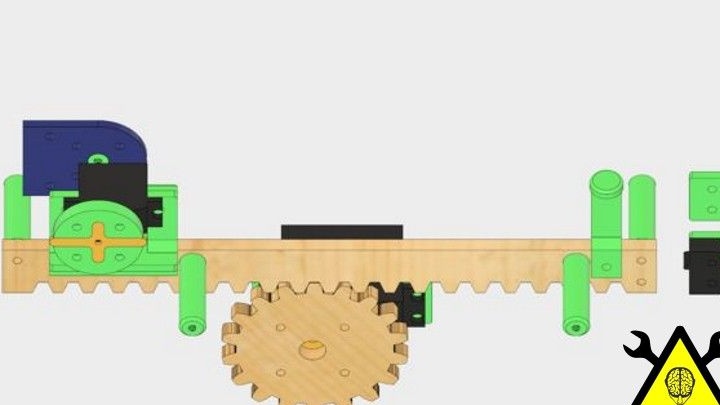
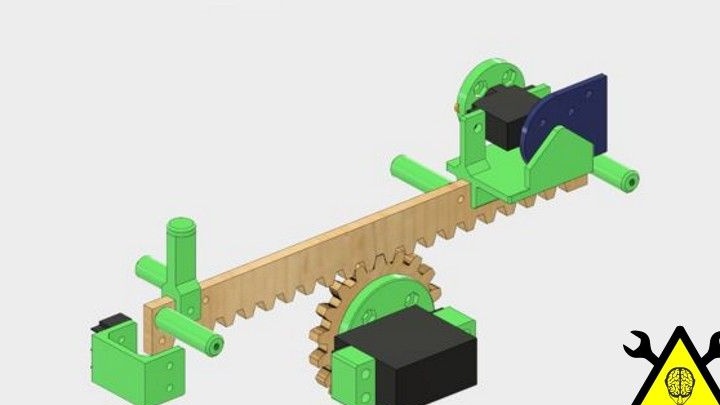
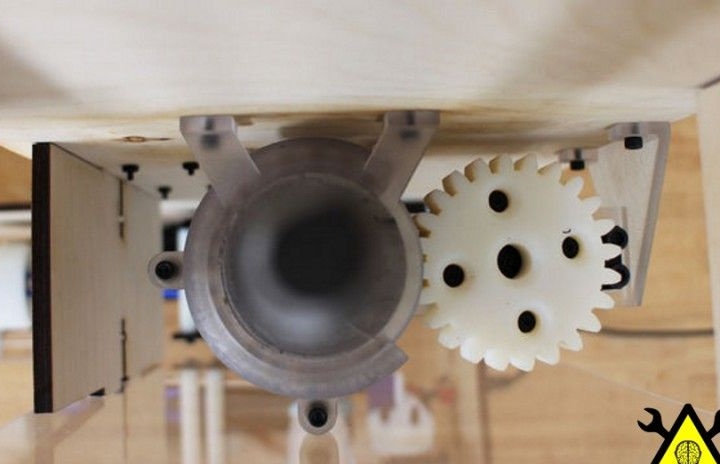
L'ingranaggio è montato sotto il telaio. È tagliato in compensato di 6 mm di spessore e fissato a un servo stelo standard. Il servoazionamento stesso è posizionato leggermente sfalsato rispetto alla piastra di base, in corrispondenza di questo ci sono montanti rettangolari identici su di esso. Il servo stesso è fissato alla base con quattro viti.
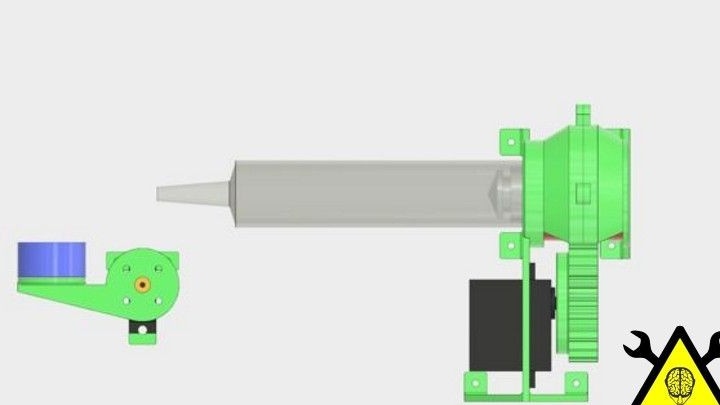
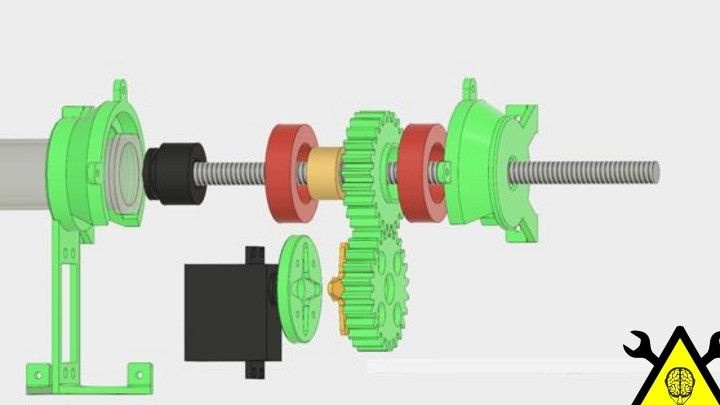
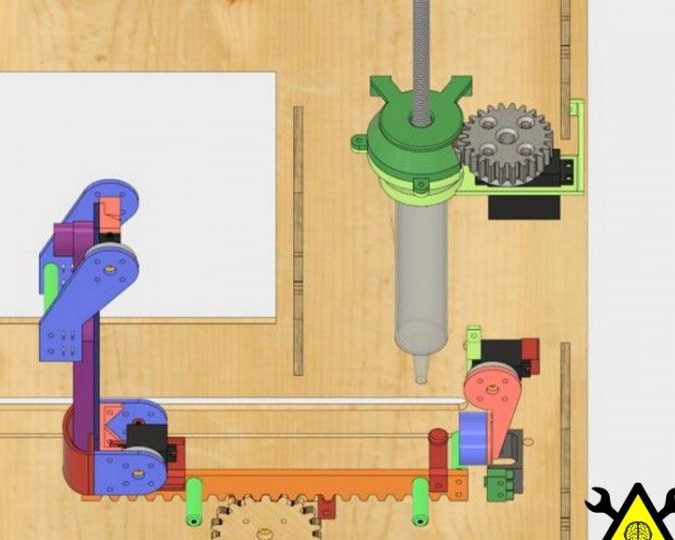
Step Six Montaggio del distributore
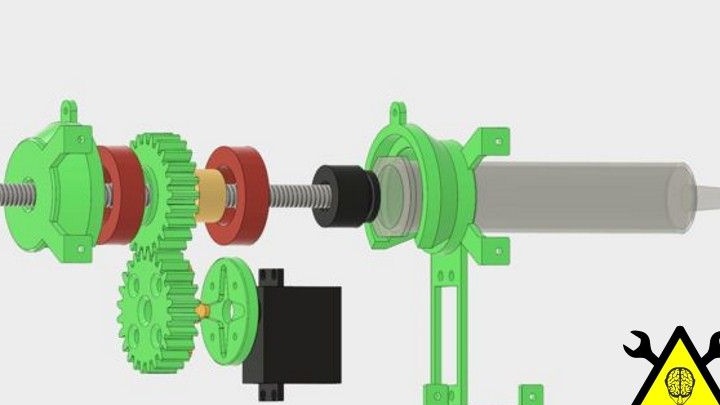
Il meccanismo più complesso nel dispositivo è un azionamento lineare. Grazie a lui, si verifica il dosaggio della pasta. Il nucleo del dispositivo è un'asta filettata e un dado, con l'aiuto di questo, il tubo viene compresso. Sei viti vengono utilizzate per fissare l'unità.
Settimo passo. software
In totale, il programma ha tre funzioni: impostare l'ora, impostare la "sveglia" e anche la funzione di avvio del dispositivo.
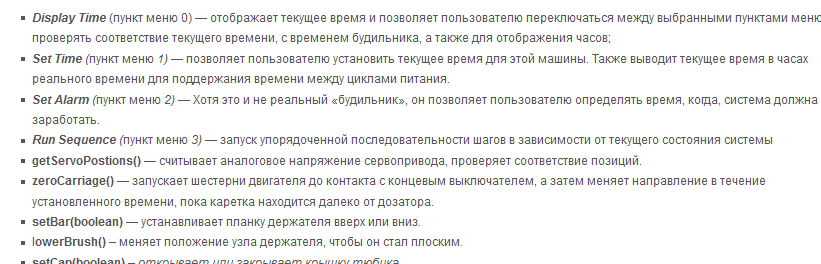
Questo è tutto, dopo aver lampeggiato e configurato il dispositivo è pronto per l'uso.