Durante la sua istruzione, l'autore ha giocato con il supporto dell'accelerometro sul suo telefono. Gli piaceva molto guidare un'auto al telefono semplicemente inclinandosi, e poi ha iniziato a sognare di fare un'auto con lo stesso controllo nella vita reale. Ora avendo Arduino e avendo acquisito competenze di programmazione, è tempo di creare una macchina gestita su Android, lo ha chiamato Hercules.
Ha preso questo nome per l'enorme coppia e l'alta velocità. modello può essere controllato utilizzando un telefono Android tramite Bluetooth. Qualsiasi telefono con questo sistema operativo è adatto per il controllo, l'autore non limita un telecomando. Inoltre, usando il telefono ho risparmiato denaro, perché non ho dovuto spendere soldi per creare un telecomando.
Materiali e strumenti:
- Arduino Uno
- Ricetrasmettitore Bluetooth
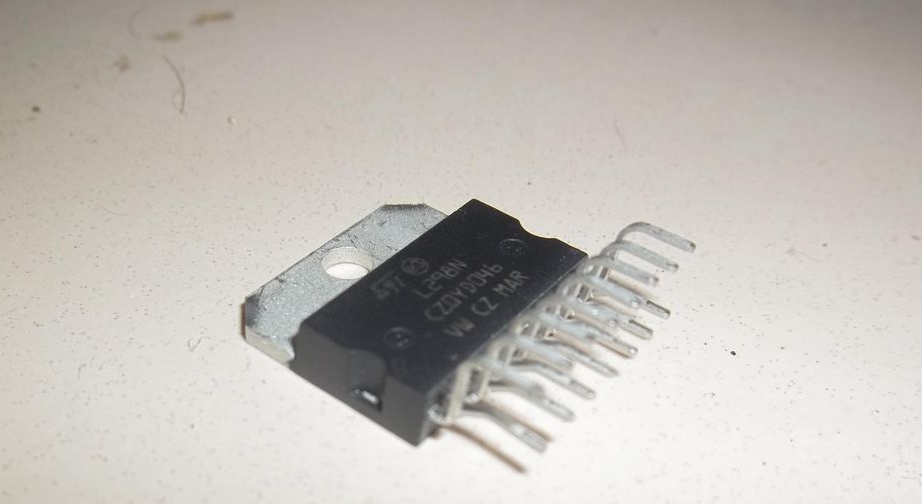
- Driver doppio motore (con ponte H L298)
- Motori con ingranaggi 4 pezzi (la potenza viene selezionata in base all'applicazione della macchina)
- Ruote 4 pezzi
- Batteria 1Ah SLA 12V
- Base per componenti (telaio)
- tagliere
- Scatole per alloggiamento 4 pezzi
- Interruttore SPST
- Cavi di collegamento per Arduino
- Fili di saldatura
- Dadi e viti di piccole dimensioni
- Resistenza 10 kOhm 1 pz
- Resistenza 20 kOhm 1 pz
- Telefono Android
- saldatore
- saldatura
- pasta per saldatura
- trapano





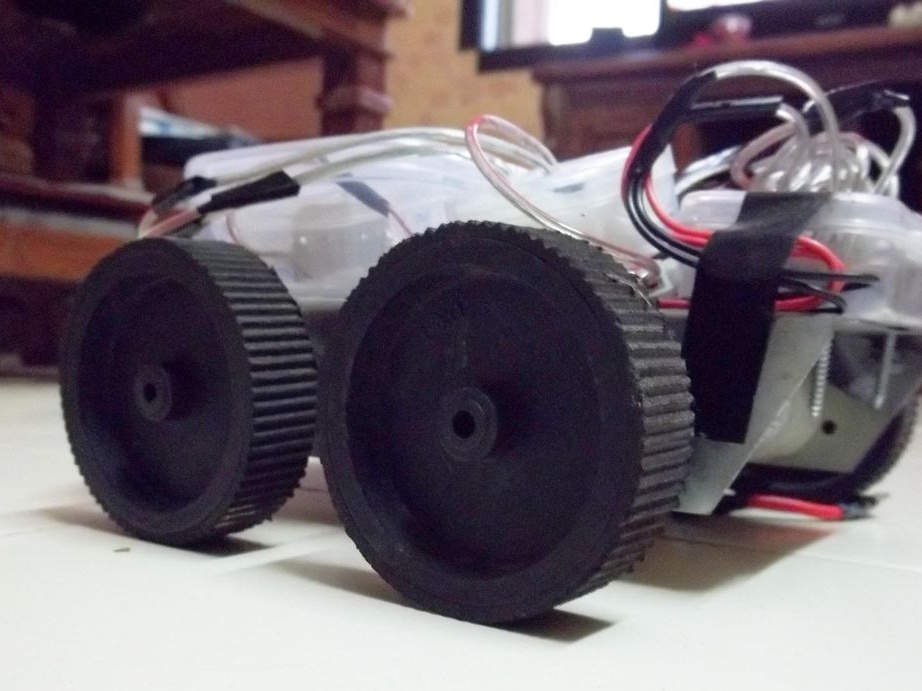
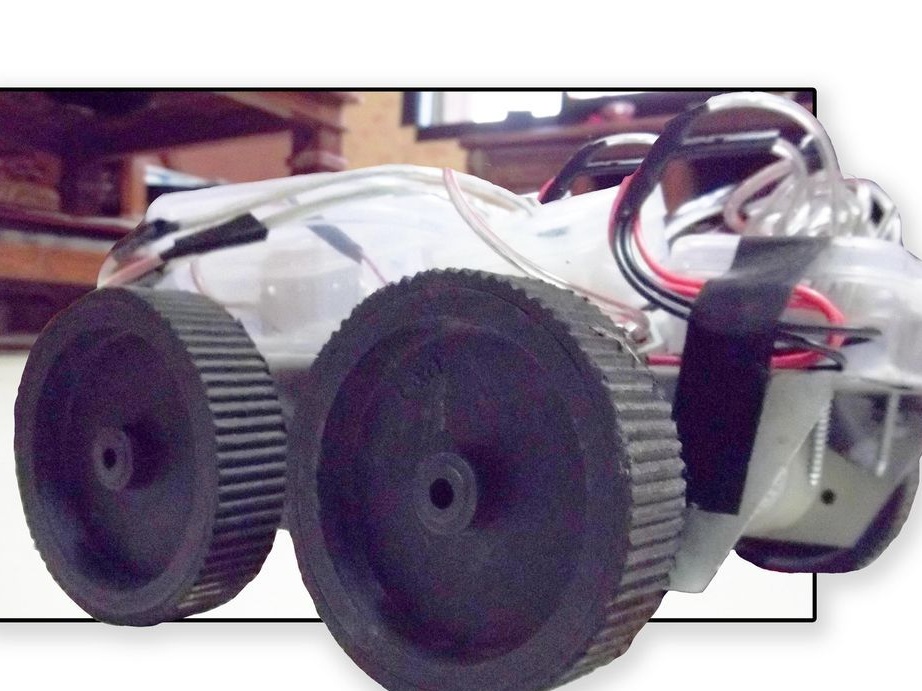
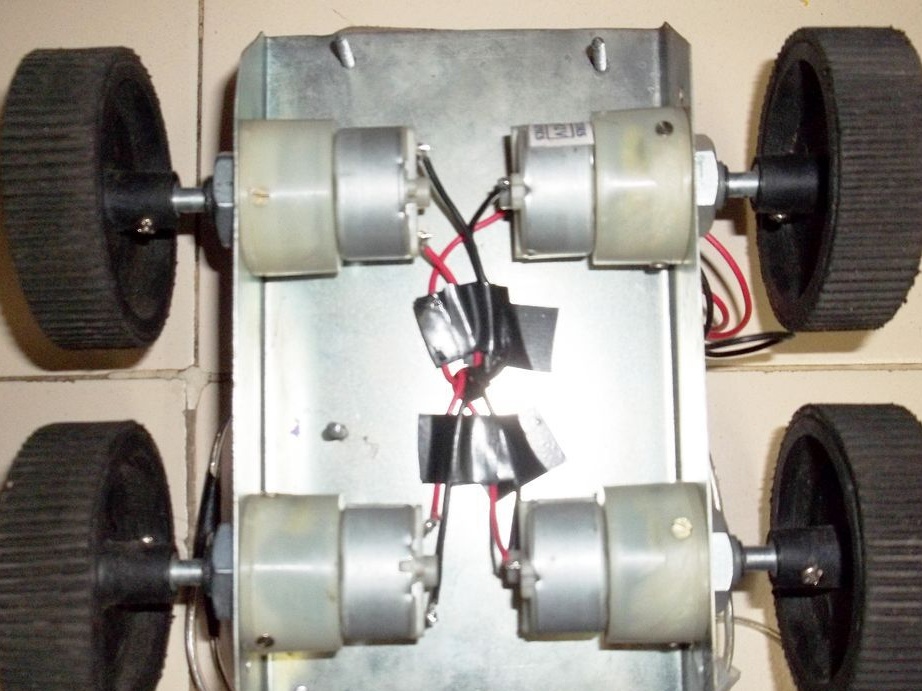
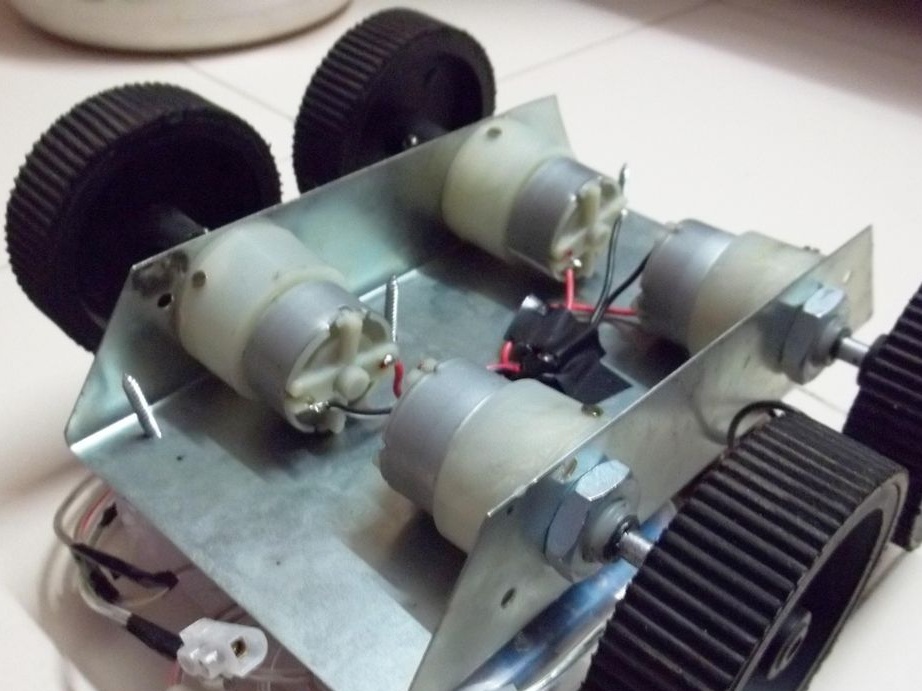
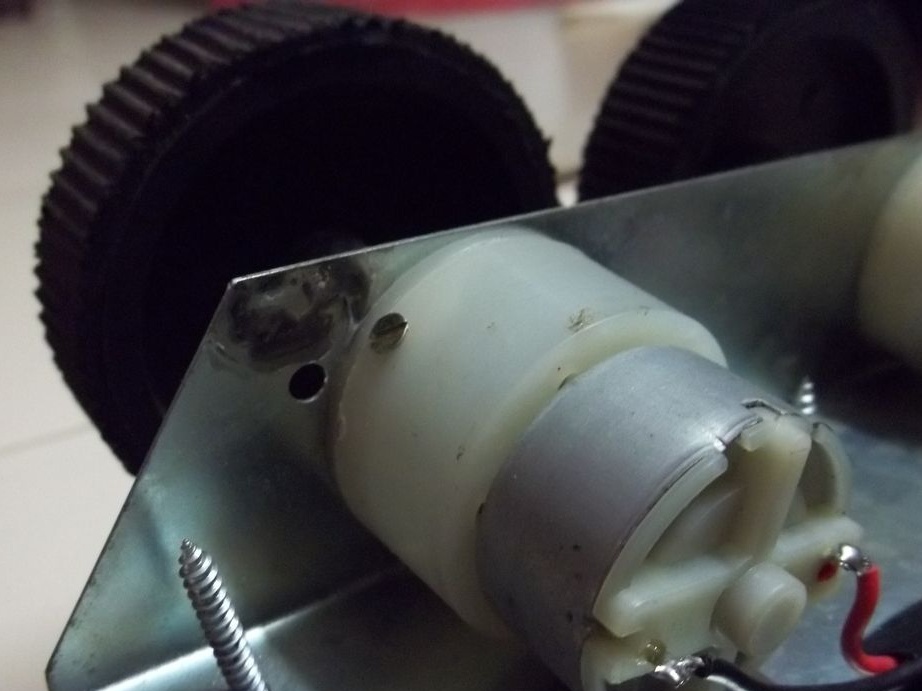
Primo passo. Ruote e telaio.
Le viti del motore hanno reso semplice installarle sul telaio utilizzando dadi. Le ruote sono installate fino all'albero motore. Due motori di destra sono accesi in parallelo tra loro e due di sinistra. L'aspetto del telaio dopo l'installazione di quattro ruote e motori è visibile nella foto in basso.
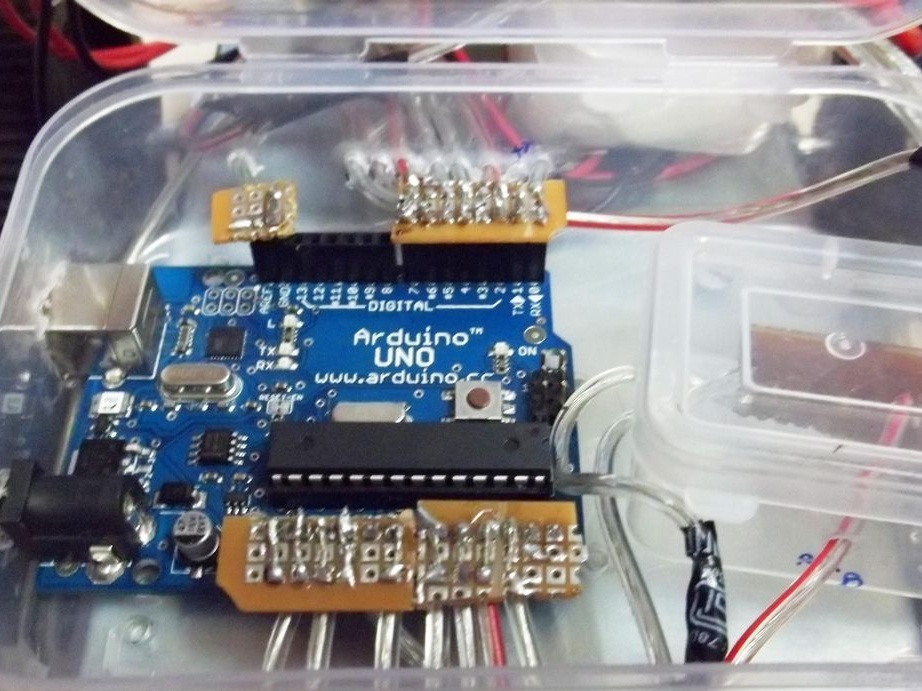
Secondo passo Alloggiamento per Arduino.
Il diagramma del caso per Arduino è diviso in più parti. Una soluzione di design modulare di questo tipo aiuterà in futuro a supportare il circuito o a eliminare un possibile malfunzionamento. Se uno dei componenti si rompe o si brucia, può essere sostituito rapidamente e senza interrompere il design. La casella per Arduino è stata creata come segue:
- Quattro parti sono state tagliate dalla breadboard, due delle quali con fori di dimensioni 8x3, le seconde due parti 6x3.
- I perni BLS sono stati saldati su ciascuna scheda sul lato lungo.
- Ogni perno sulla breadboard è stato inoltre saldato con fili lunghi circa 10 cm, in modo che i fili non si staccassero dall'Arduino, perché ora il carico ha iniziato a essere distribuito uniformemente.
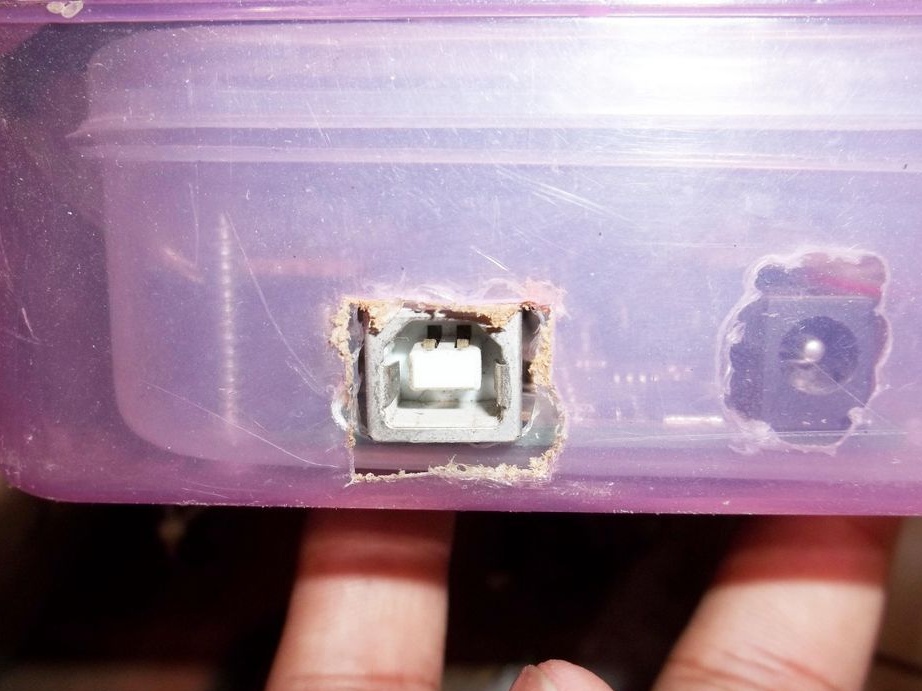
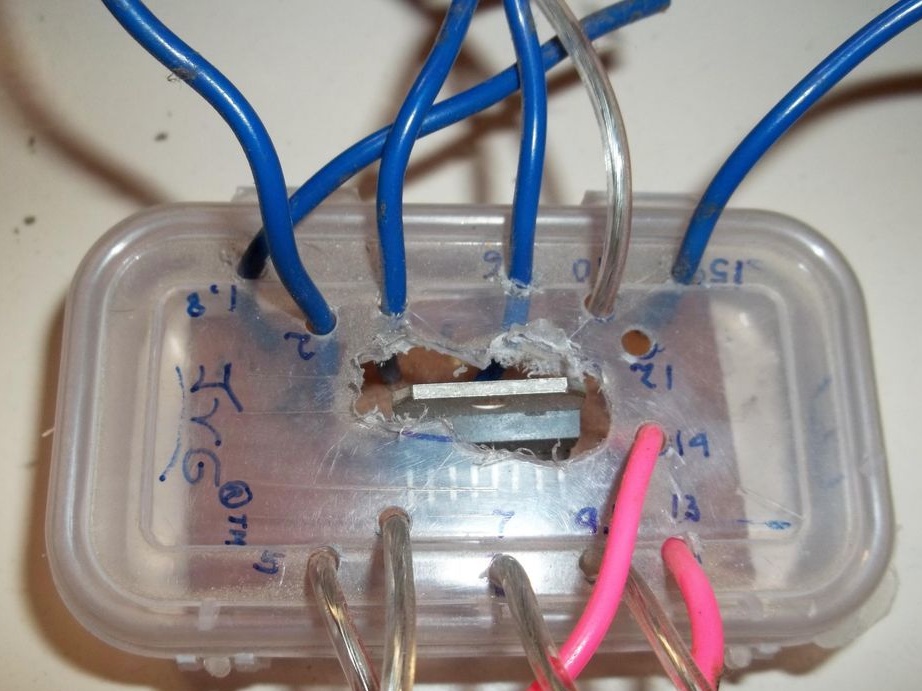
- Successivamente, la scheda Arduino è stata inserita nel case in modo che l'uscita USB toccasse il muro. È stato creato un buco per questo output, questo aiuterà a caricare programmi aggiuntivi nella macchina o apportare correzioni a quelli esistenti. Ai lati della scatola, venivano praticati dei fori per i fili che sarebbero andati dal tabellone. Ulteriori fori sono stati ritagliati nella parte inferiore della scatola, sotto i connettori di montaggio di Arduino.


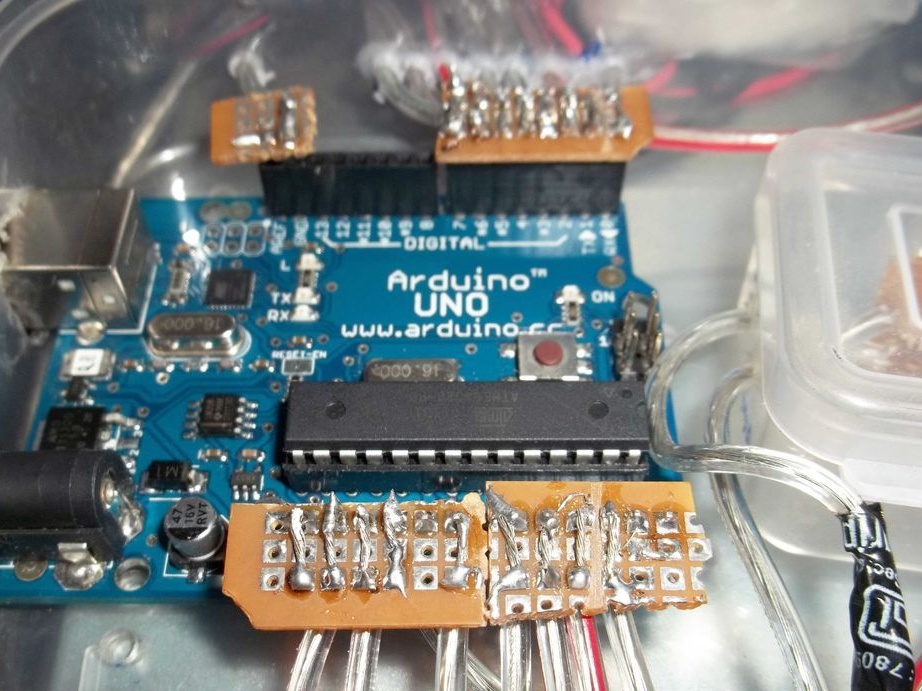
Terzo passo Ricetrasmettitore Bluetooth.
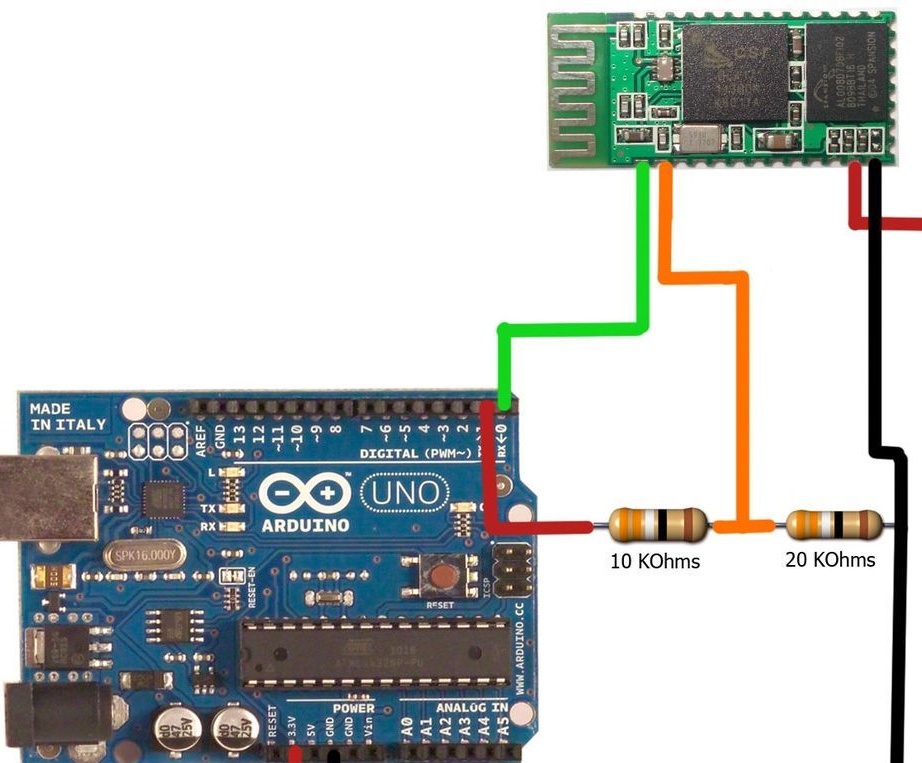
I cavi di saldatura a un ricetrasmettitore Bluetooth sono il compito più difficile nell'assemblare questo progetto, all'autore mancava davvero una terza mano durante la saldatura. Sono stati usati quattro conduttori lunghi 10 cm; sono stati saldati ai pin 1 (Tx), 2 (Rx), 12 (+ 3.3B) e 13 (GND). Ora il ricetrasmettitore potrebbe essere collocato in un alloggiamento con fori predisposti per i fili. L'autore ha incollato i fili alla scatola per impedire ai fili di strappare i contatti.



Il quarto passo. Custodia per resistori.
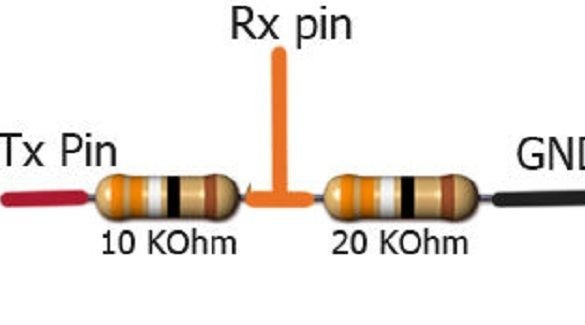
A causa del fatto che l'uscita Arduino Tx invia un segnale con una tensione di 5 V e il modulo Bluetooth funziona con una tensione di 3,3 V, era necessario convertire da 5 V a 3,3 V. Per questo compito, l'autore ha utilizzato un divisore di tensione. Secondo il circuito fornito di seguito, ha saldato una resistenza al pezzo rimanente della breadboard. Naturalmente, è stato possibile inserire questo circuito in un caso Arduino, ma non c'era abbastanza spazio, quindi l'autore ne ha creato uno separato per i resistori.


Fase cinque Macchinista.
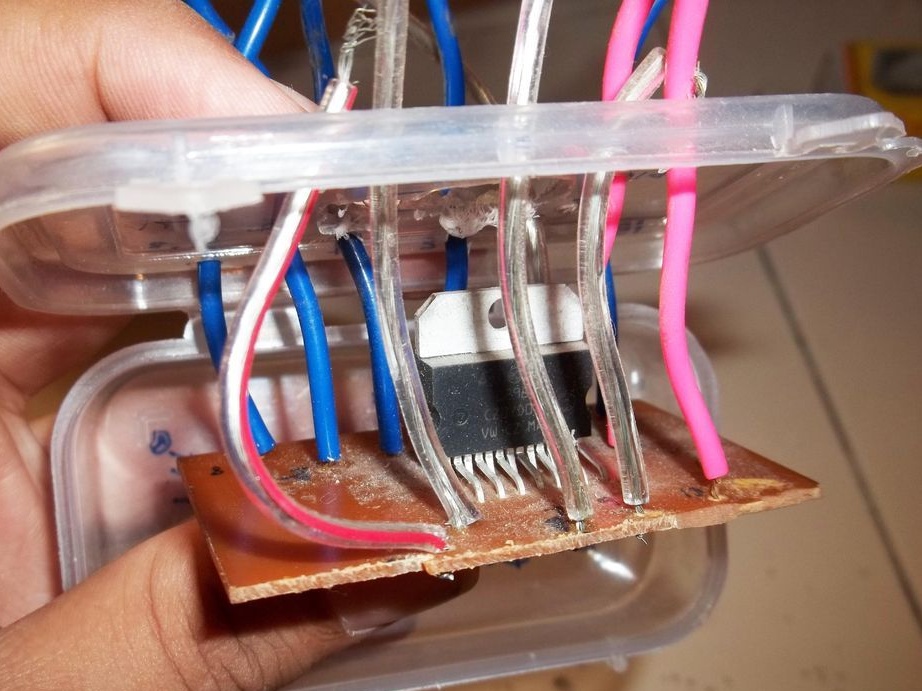
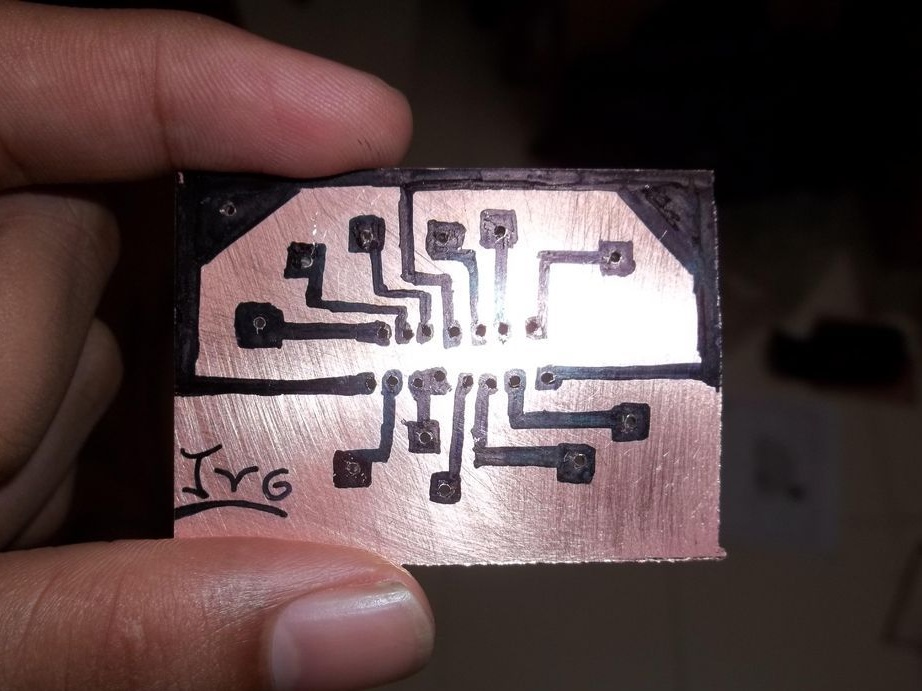
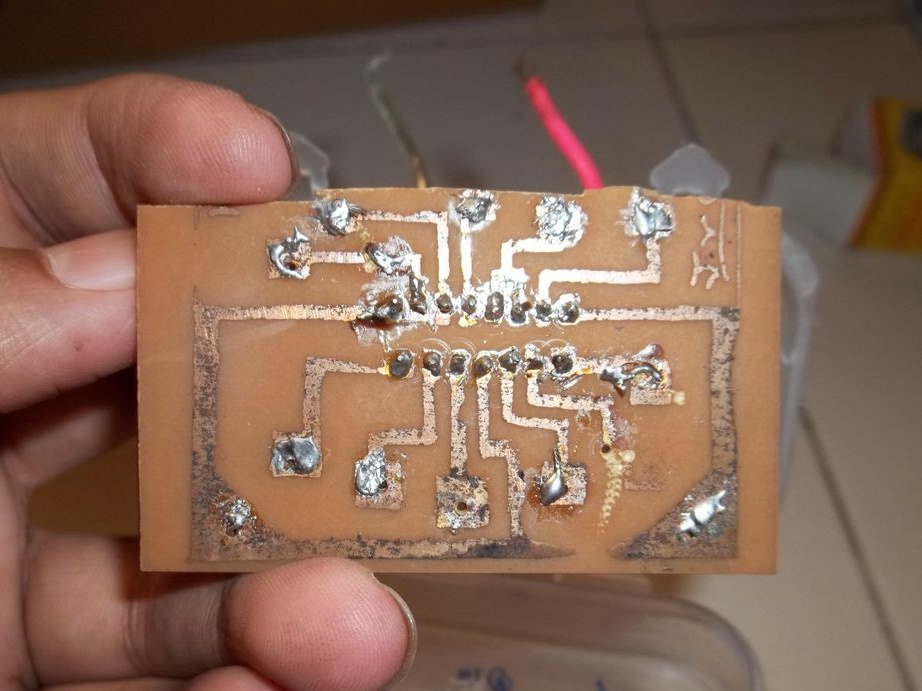
L'autore utilizza un doppio driver con un L298 IC H-bridge, controlla quattro motori. Per lui, l'autore ha creato una scheda per facilitare la saldatura dei fili, la scheda stessa nella foto sotto. Dopo la saldatura, il driver è stato anche inserito in una custodia separata con fori per i fili.
Step Six L'assemblea finale.
Ogni singolo componente è collegato ad Arduino secondo lo schema.
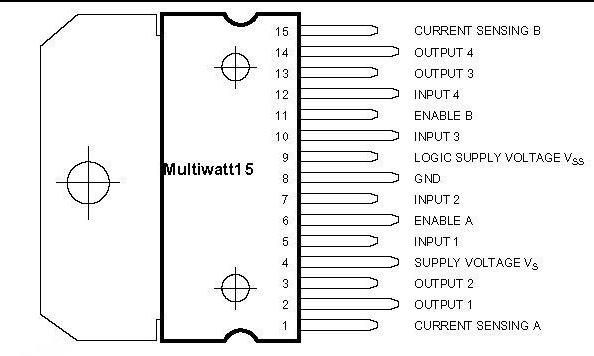
Il collegamento del driver del motore con Arduino ha avuto luogo in base a questo pinout:
1 a GND
2 al primo contatto dei motori di sinistra
3 al secondo contatto dei motori di sinistra
4 a una batteria da 12V
5 per aggiungere Arduino 2
6 al pin Arduino 3
7 per bloccare Arduino 4
8 a GND
9 a 5 V con Arduino
10 per aggiungere Arduino 5
11 per aggiungere Arduino 6
12 al pin Arduino 7
13 al primo contatto dei motori giusti
14 al secondo contatto dei motori giusti
15 a GND
L'alimentazione a 12V era collegata al pin Vin Arduino e al pin 4 di L298. GND Arduino rispettivamente all'alimentatore GND.
Settimo passo. Programma per Arduino.
Per il corretto funzionamento del programma, era necessario installare la libreria Amarino, che può essere scaricata. Puoi scaricare il codice sorgente per Arduino sotto l'articolo.
Passo otto Software per Android
Amarino Library è un toolkit per lavorare con smartphone Android. Installando un'applicazione aggiuntiva sul telefono, è possibile iniziare a scrivere un programma.
È possibile scaricare l'app e il plug-in Amarino. Dopo averli installati sul telefono, è rimasto solo per accendere la macchina e connettersi ad essa e selezionare la sezione Aggiungi eventi-> Sensore accelerometro.
Video con l'installazione di Amarino e dei suoi plugin:
La velocità della macchina è uguale all'inclinazione del telefono. Se la macchina si sposta nella direzione sbagliata, è necessario scambiare i fili dai motori.