


Quindi, prendendo la tecnica lego da mio figlio ea casa Arduino Nano ha iniziato a combinare questi designer.
Avremo bisogno di:
- Lego Technic (kit 42029 e 42033)
- Arduino Nano (link alla scheda)
- DRV 8833
- 2 servoazionamenti SG-90
- Ricevitore IR
- motoriduttore
- 2 LED
- 2 resistori 150 ohm
- Condensatore 10v 1000uF
- 2 pettini a fila singola PLS-40
- 2 connettori PBS-20
- Induttore 68mkGn
- 4 batterie NI-Mn 1.2v 1000mA
- Connettore papà-mamma a due pin da cablare
- Homutik
- Fili di diversi colori
- saldatura
- Colofonia
- saldatore
- Bulloni 3x40 e dadi e rondelle per loro
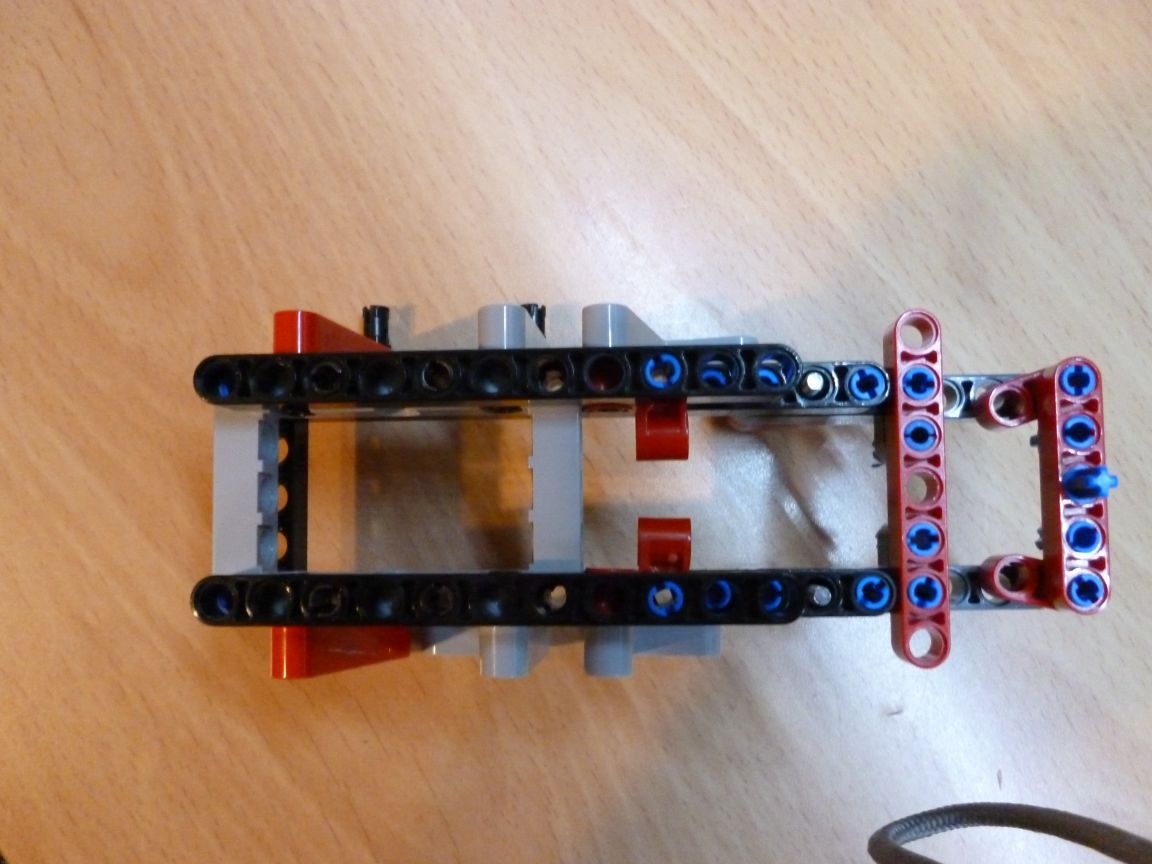
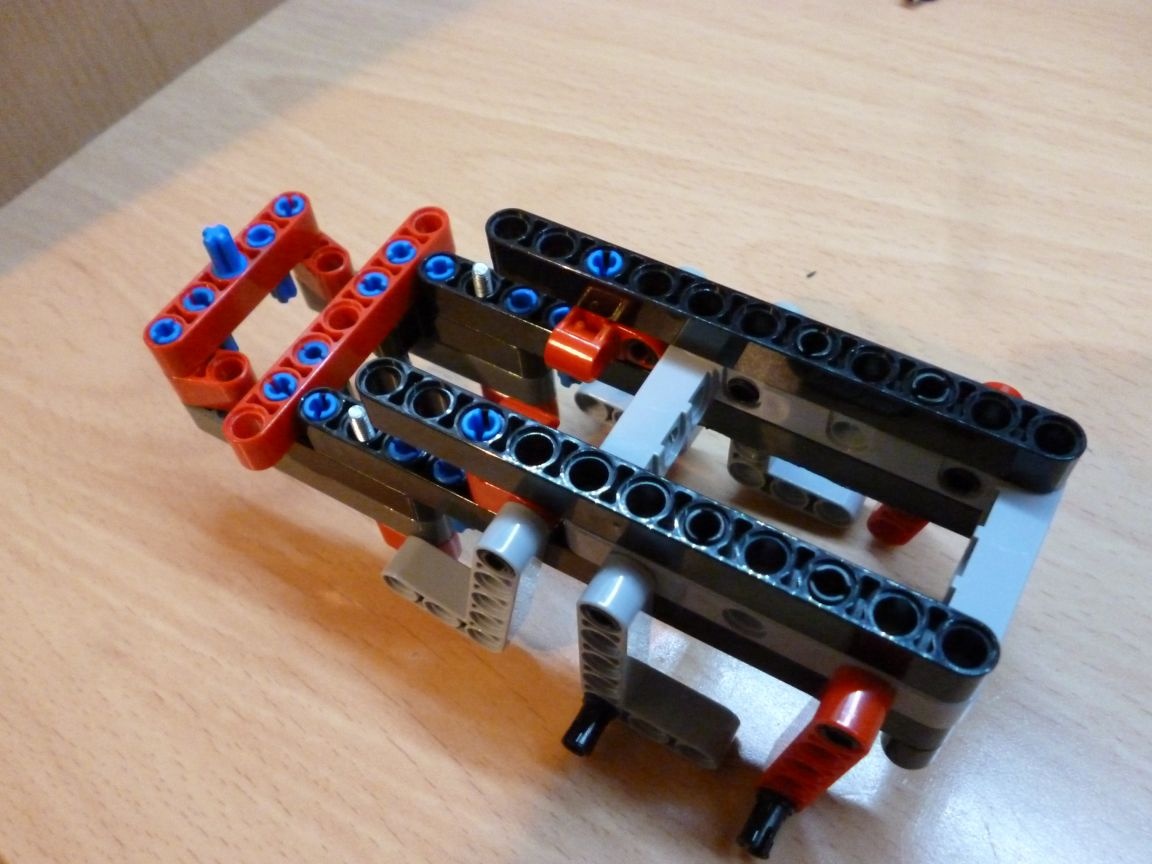
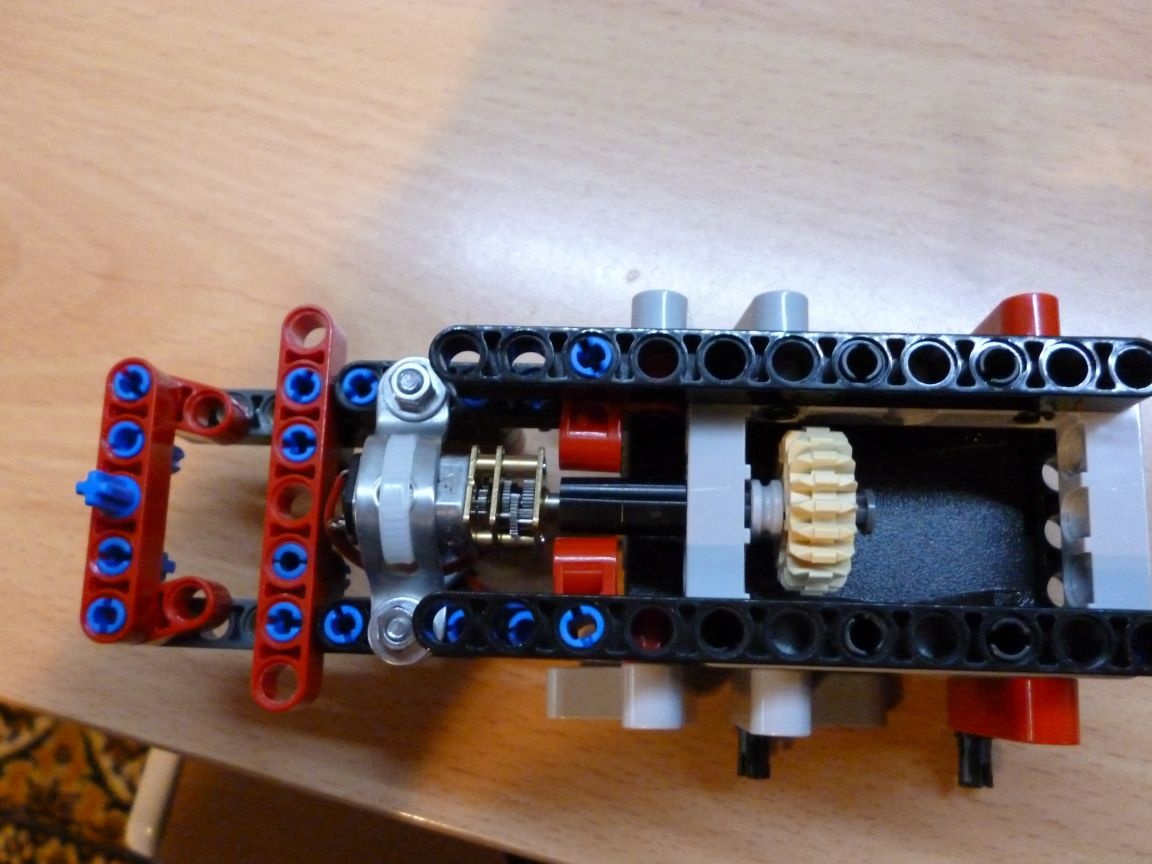
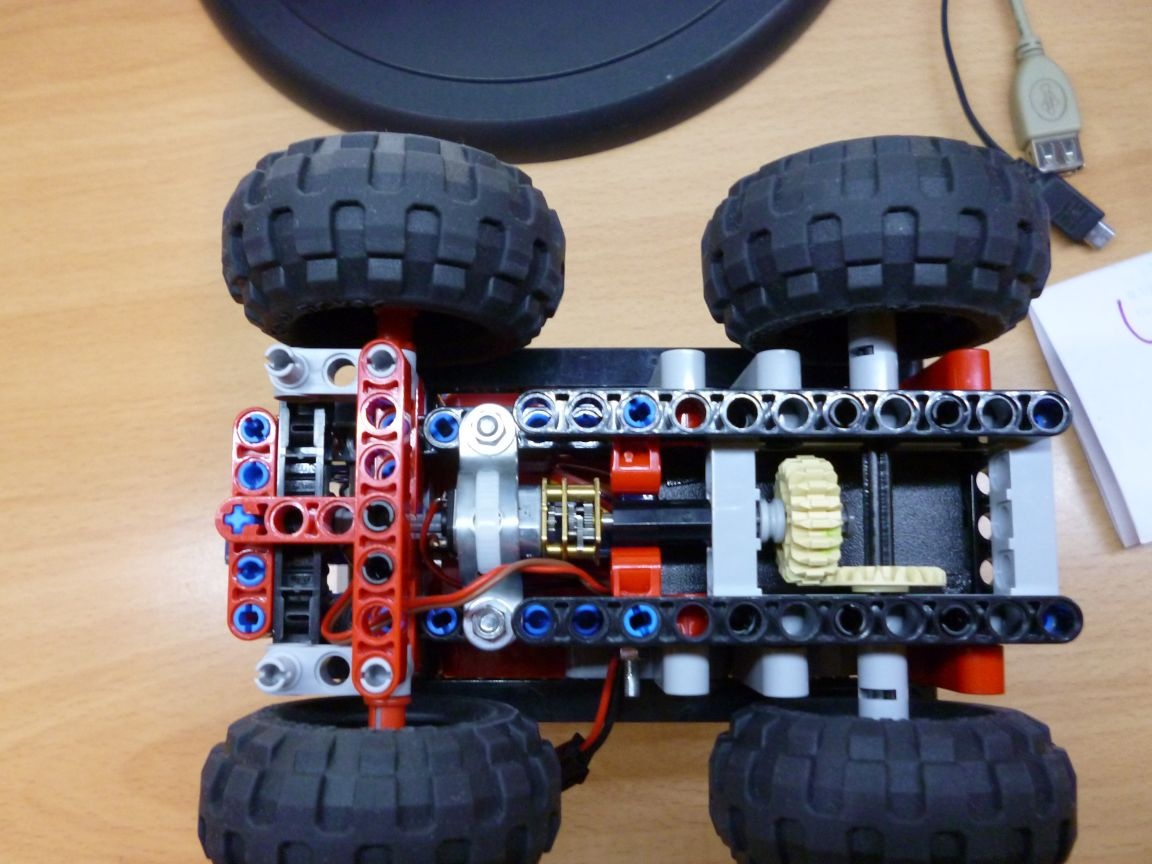
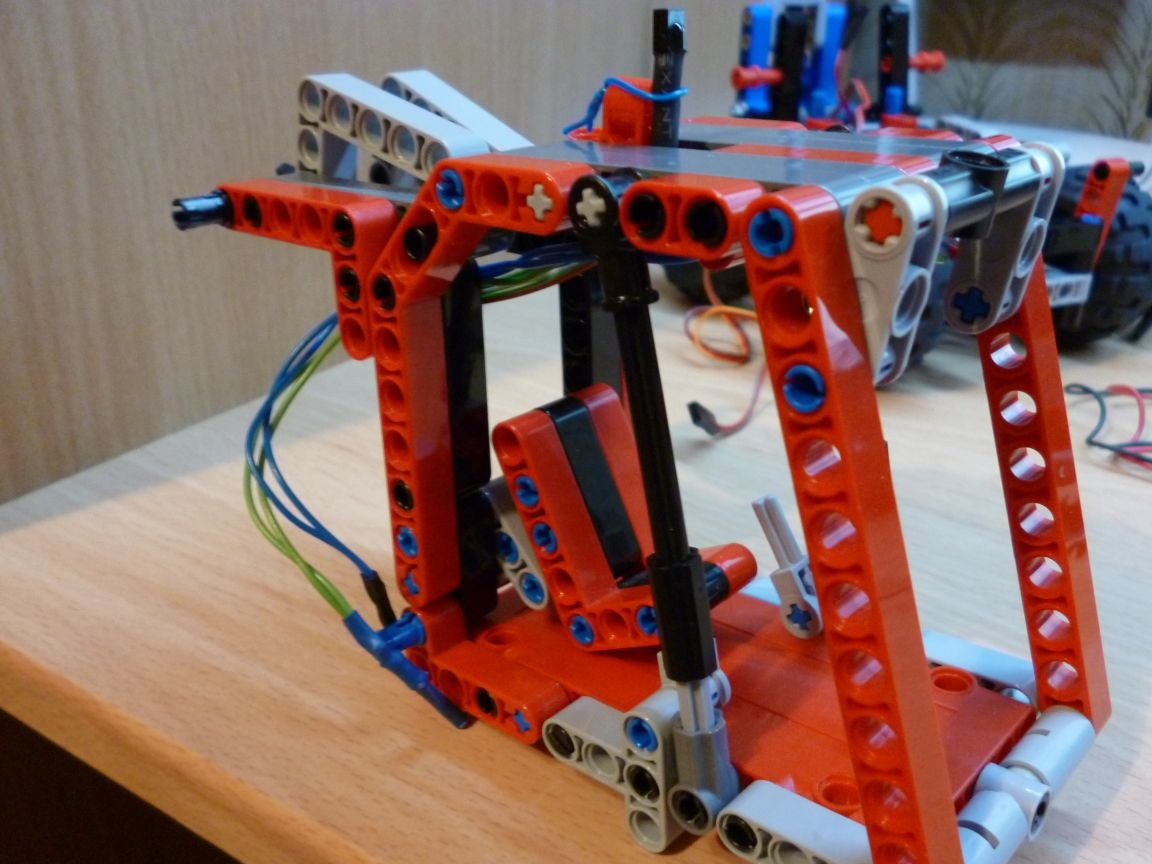
Passaggio 1: assemblare il telaio e l'asse motore.
Puoi assemblare qualsiasi telaio da Technic, comunque, è risultato così.
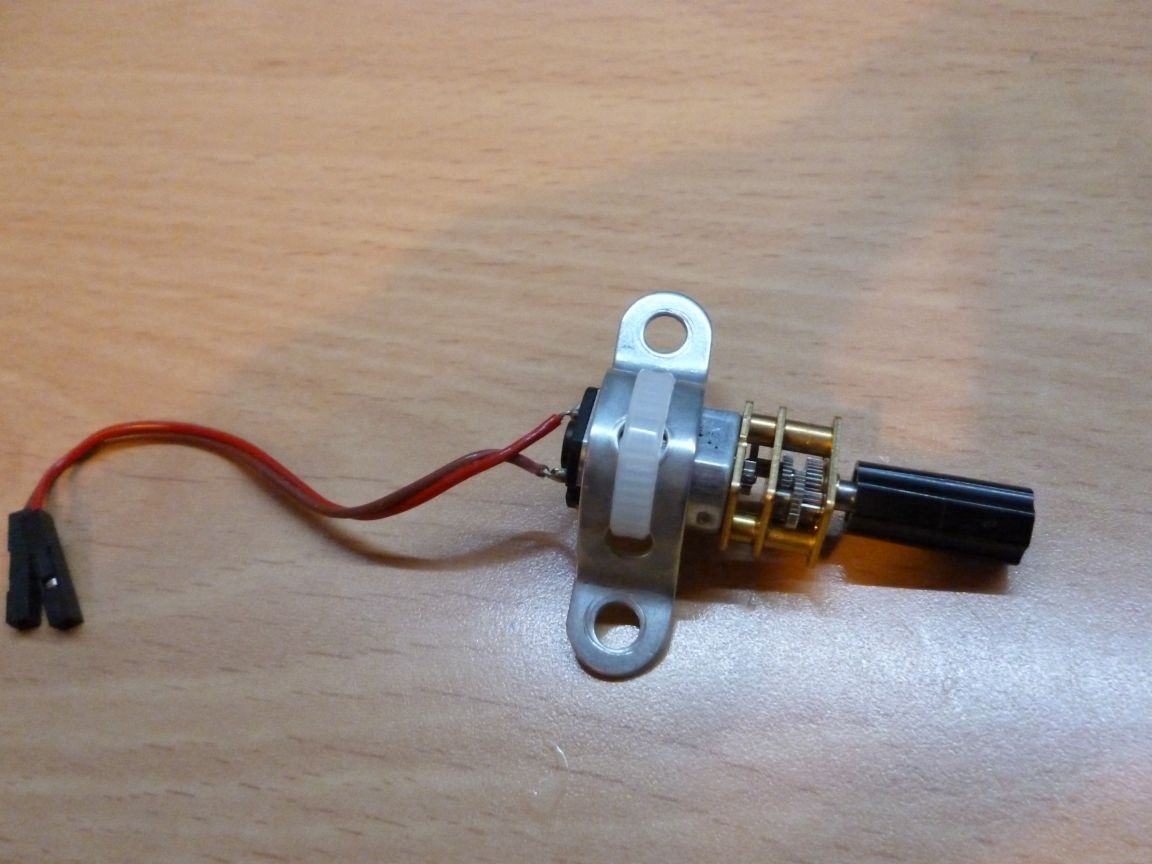
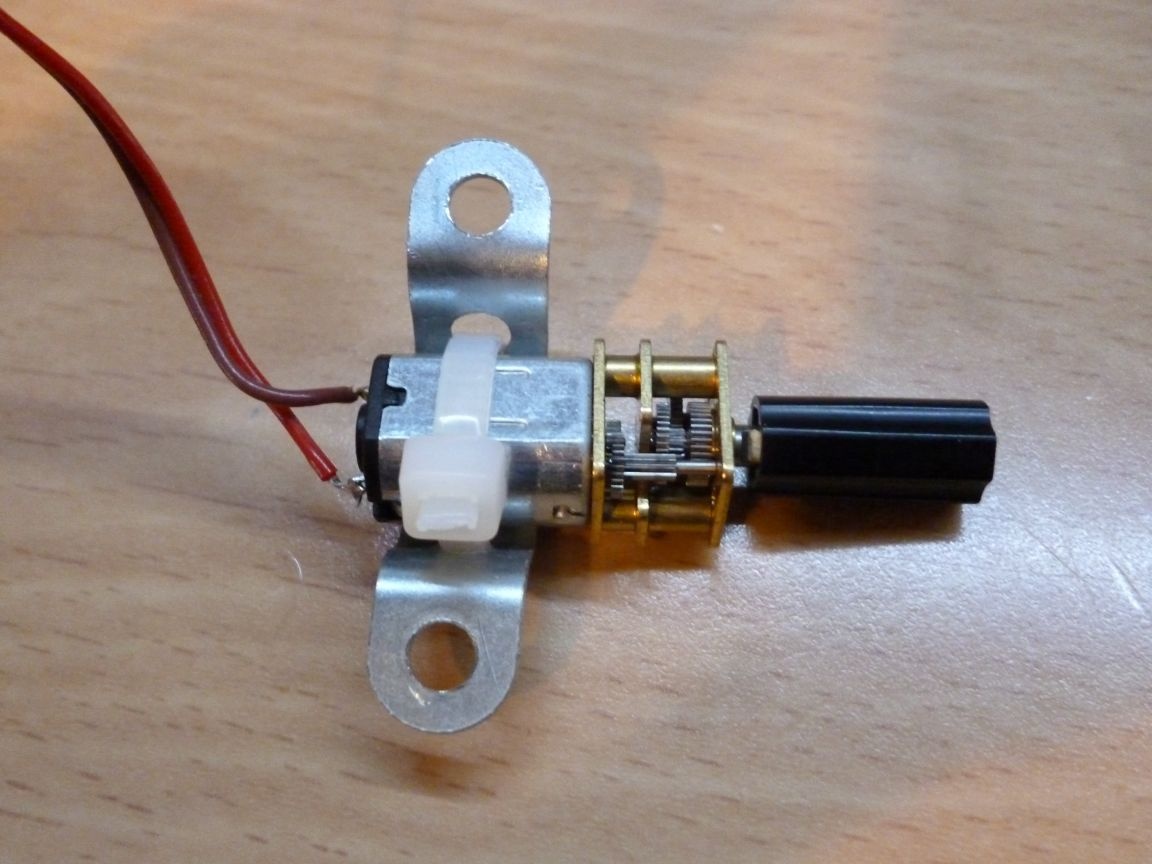
C'è solo il problema di collegare il motoriduttore con le parti del progettista. Ho deciso questo come segue: mettere sull'asse del motoriduttore una bussola di collegamento e inserire uno scarto di un fiammifero per il fissaggio. Per il montaggio del motoriduttore è stata utilizzata la plastica in metallo di un designer di ferro e un morsetto. Si è scoperto quanto segue:
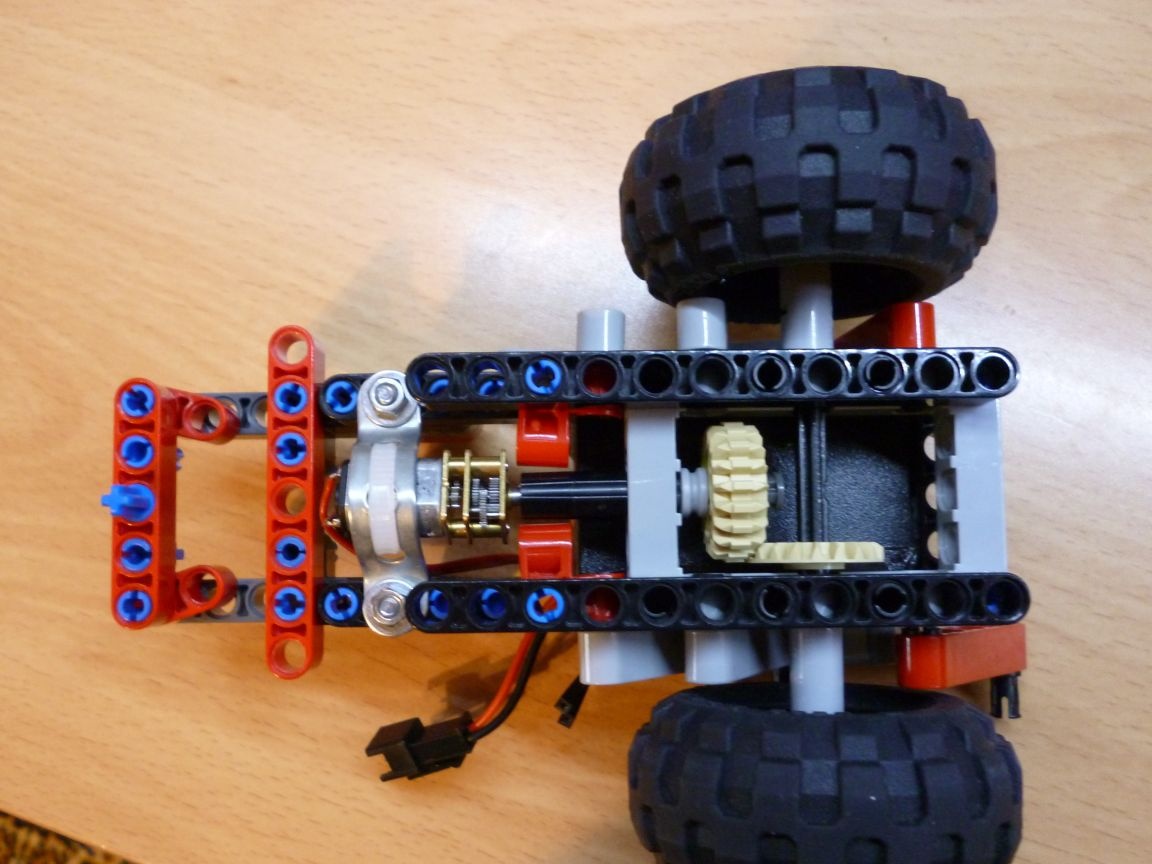
Quindi, installiamo il design risultante sullo chassis utilizzando bulloni 3x40:
E metti le ruote:
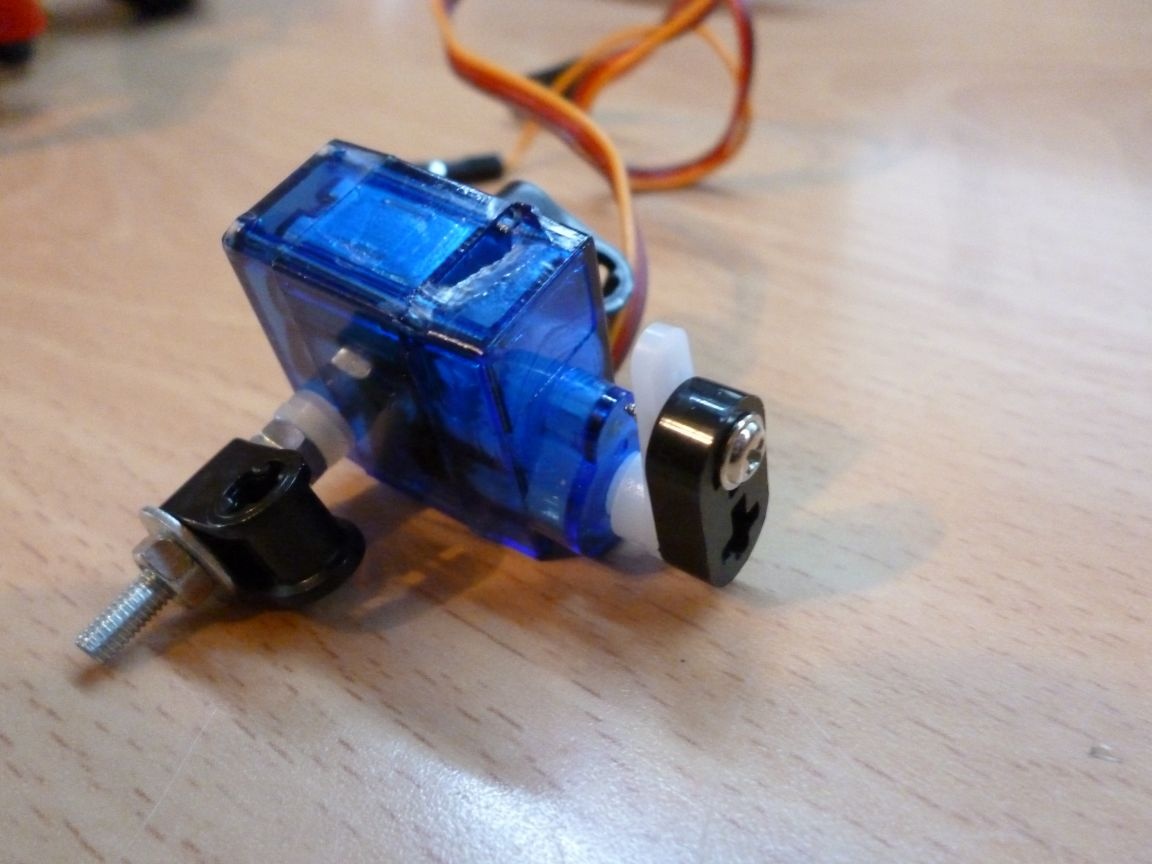
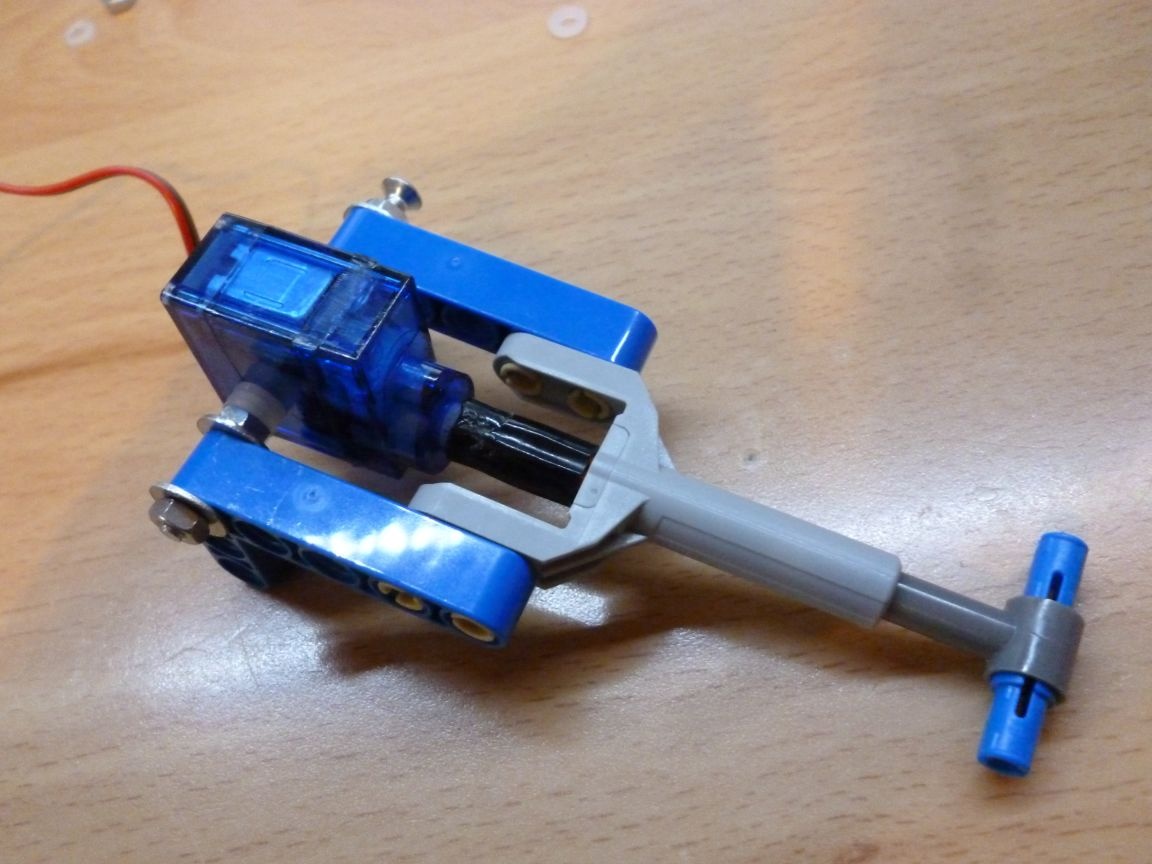
Passo 2 ruote piroettanti
Per eseguire la rotazione ha preso il servo SG-90. È necessario perforare attentamente, in modo da non toccare le parti interne, un foro passante con un diametro di 3,2 mm o semplicemente tagliare con un coltello da cancelleria.

Inseriamo il bullone nel foro fatto e ai bordi degli angoli e fissiamo con i dadi:

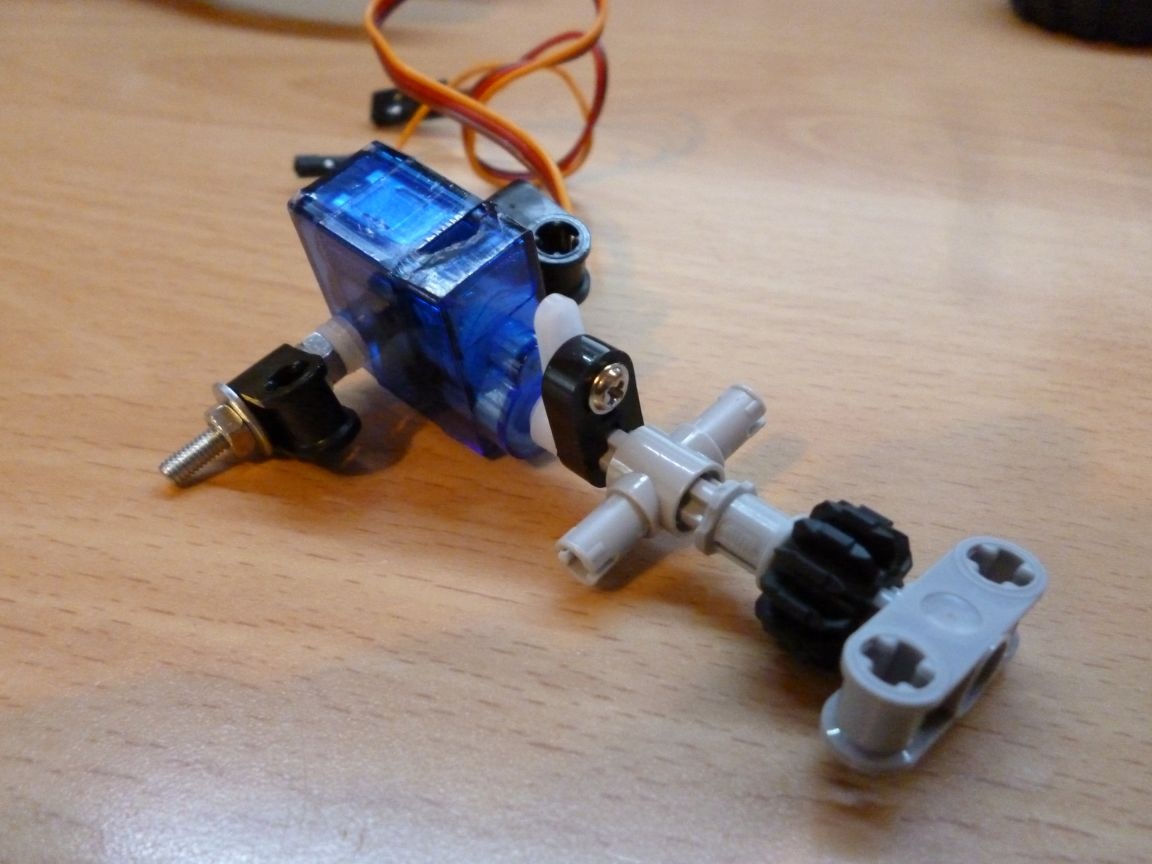
Sull'asta del servo mettiamo una leva con una parte avvitata da lego:
E infine il gruppo girevole:
Indossiamo il telaio:

Metti le ruote:
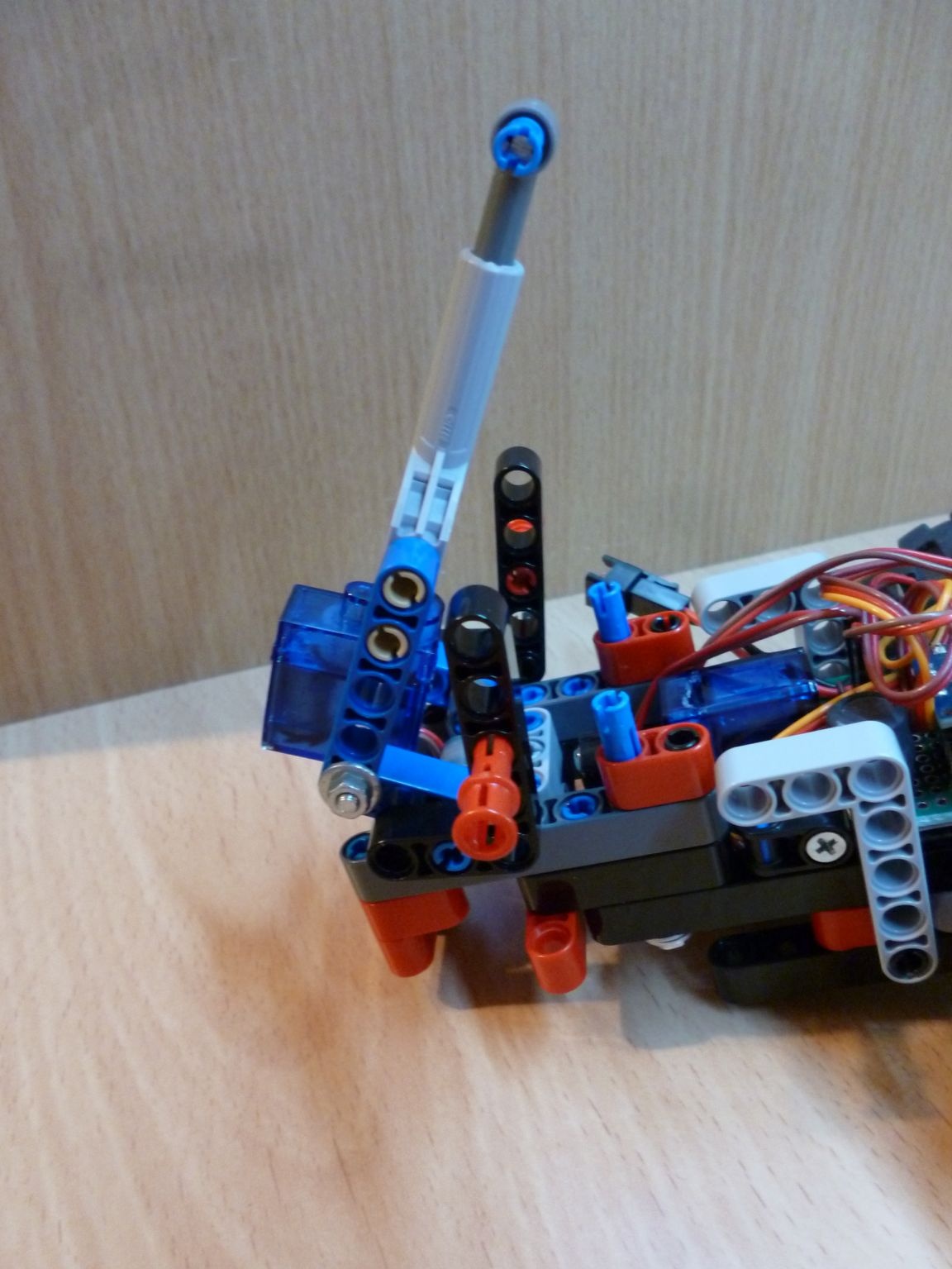
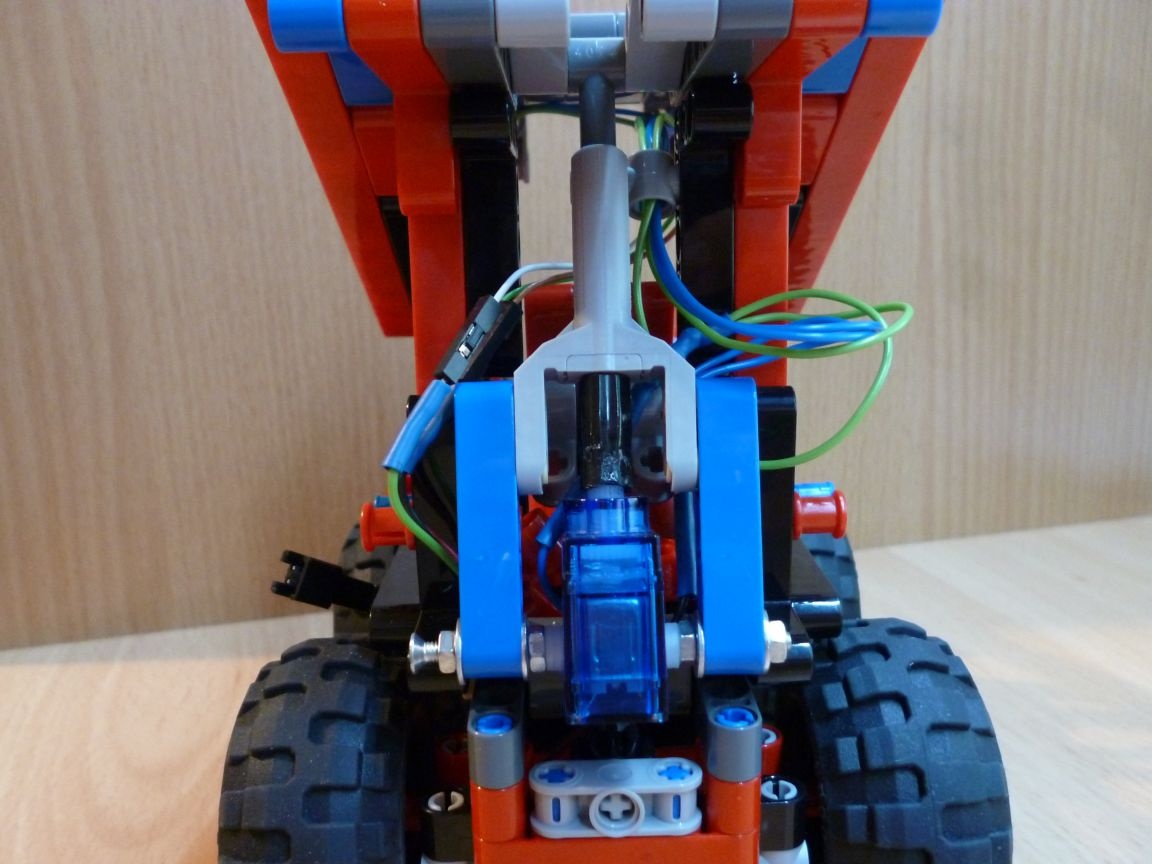
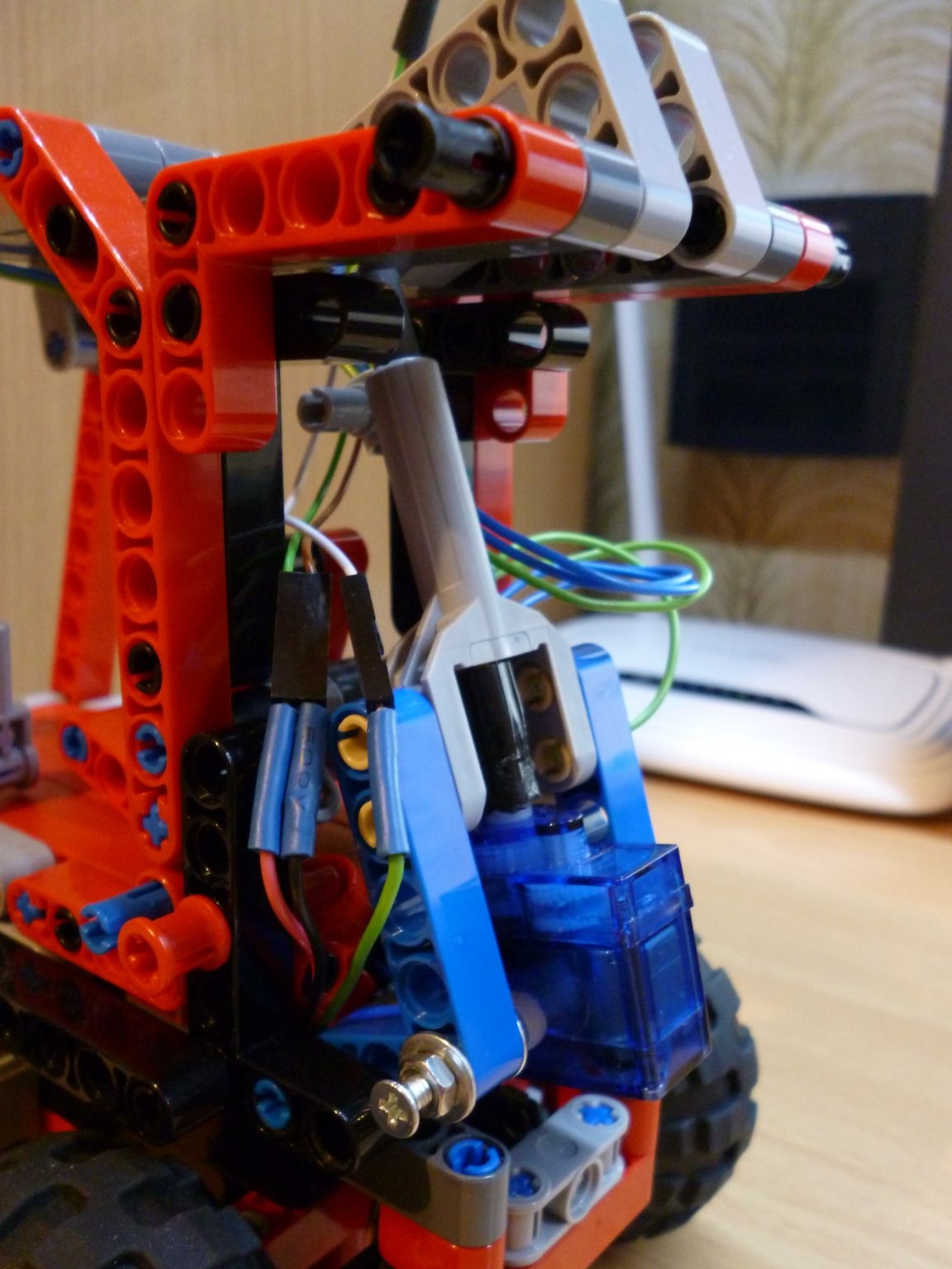
Passo 3 dispositivo di sollevamento.
Per sollevare il secchio prese un servo modificato SG-90. Il punto centrale della sua modifica è rimuovere il controller interno e saldare i fili direttamente al motore per far uscire un motoriduttore dal servoazionamento, in modo che possa girare completamente. Oltre al primo servo, è necessario praticare un foro passante per il montaggio:
Installa sullo chassis:
Passaggio 4 cabina.
È necessario assemblare una cabina dalla tecnica lego dalle fotografie:

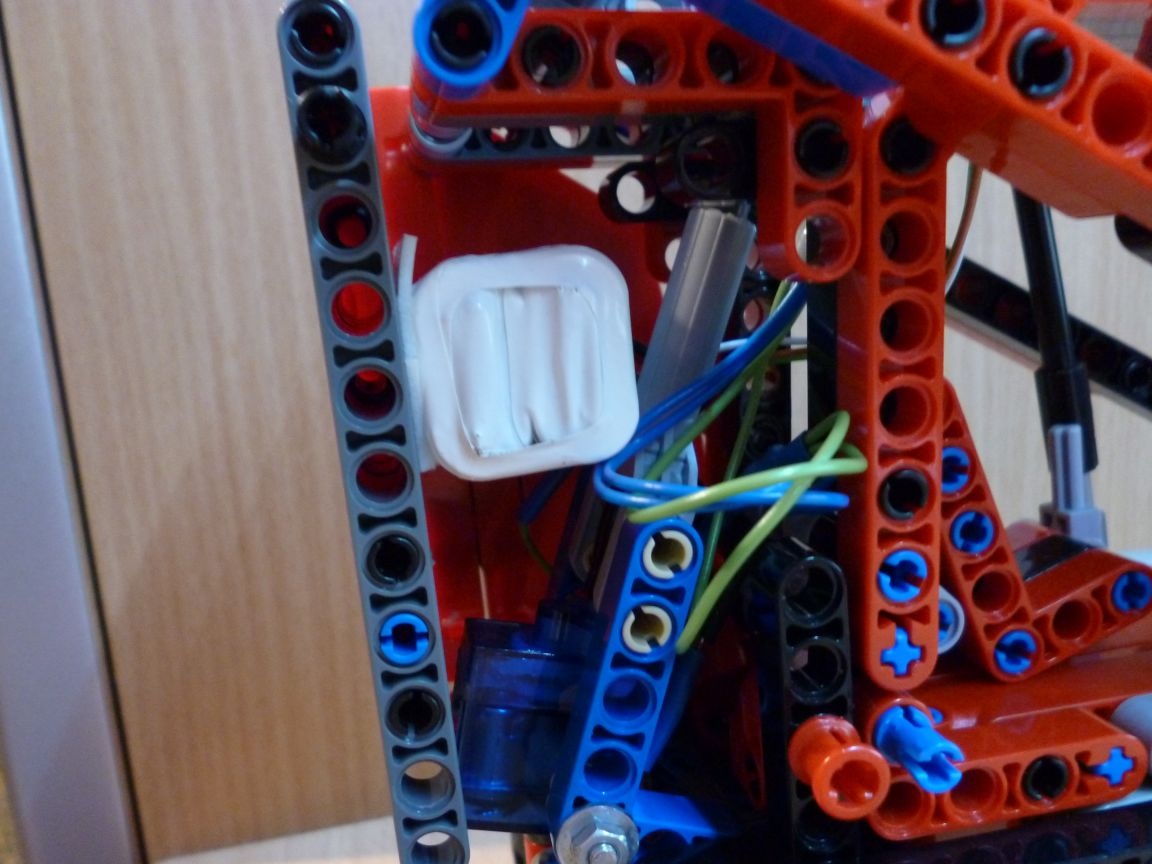
Il passaggio 5 è un elettricista.
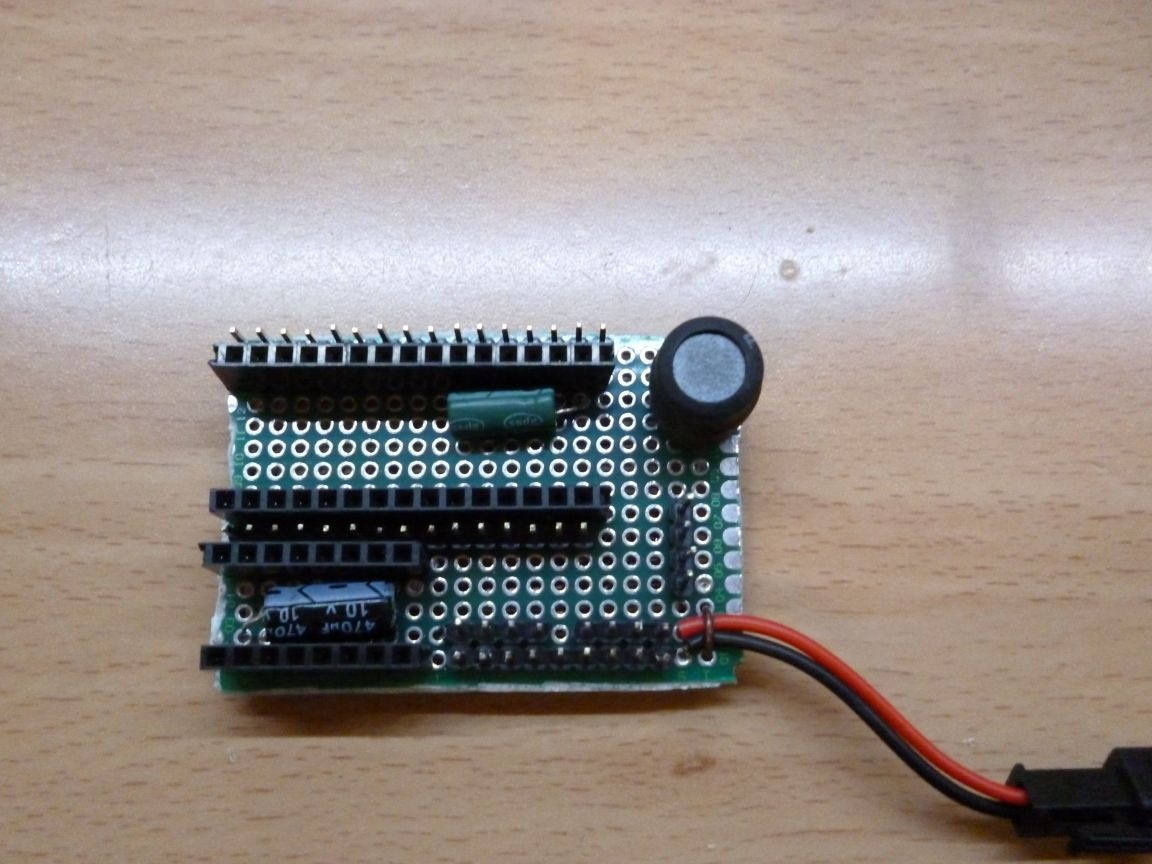
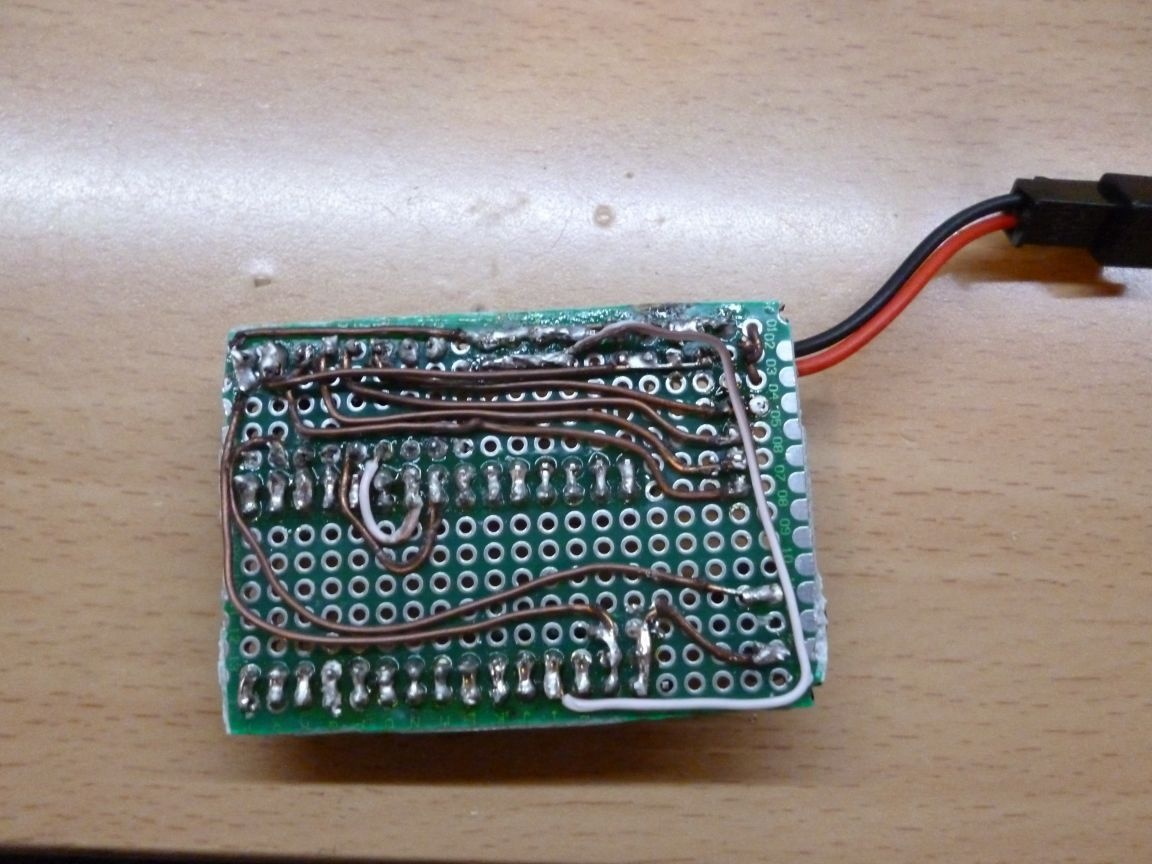
Qui devi assumere un saldatore. Per comodità, è necessario saldare tutto sul circuito secondo lo schema seguente:
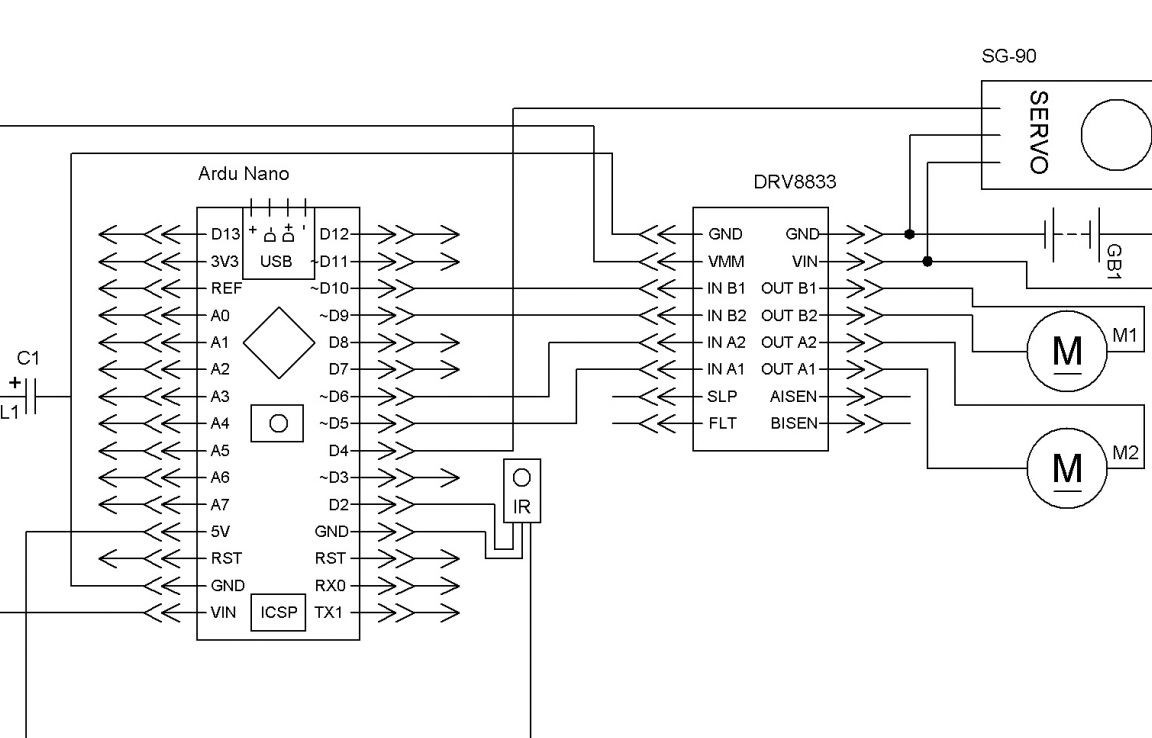
Penso che valga la pena spiegare un po ': puoi prendere qualsiasi condensatore a bassa potenza, puoi anche trovare un induttore di qualsiasi tipo, questo è necessario per stabilizzare la tensione del microcontrollore. I resistori devono essere selezionati per i LED utilizzati. Ho preso un ricevitore IR da un vecchio giocattolo, ma puoi acquistarlo in un negozio radiofonico. In caso di forti interferenze, aggiungere un condensatore al circuito di alimentazione del ricevitore IR.
Ho ottenuto questo:
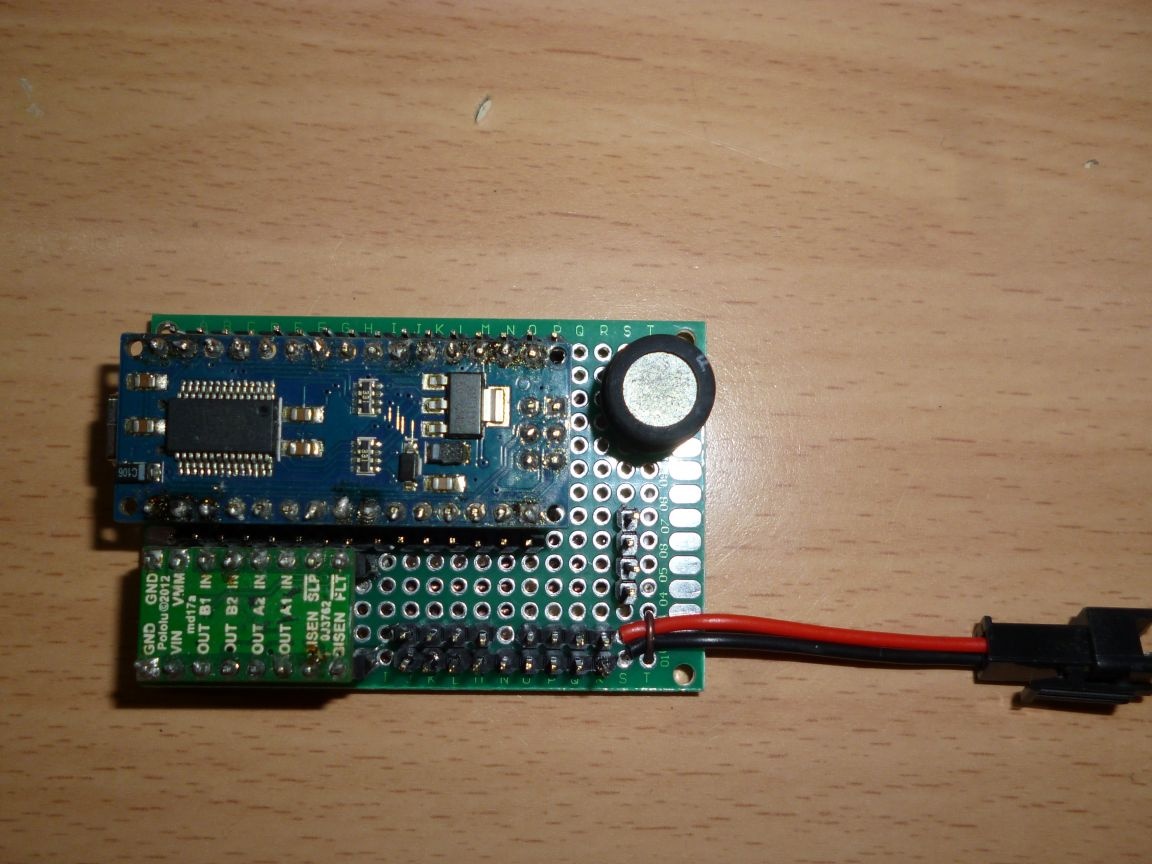
Installiamo Arduino Nano e DRV 8833 al loro posto:
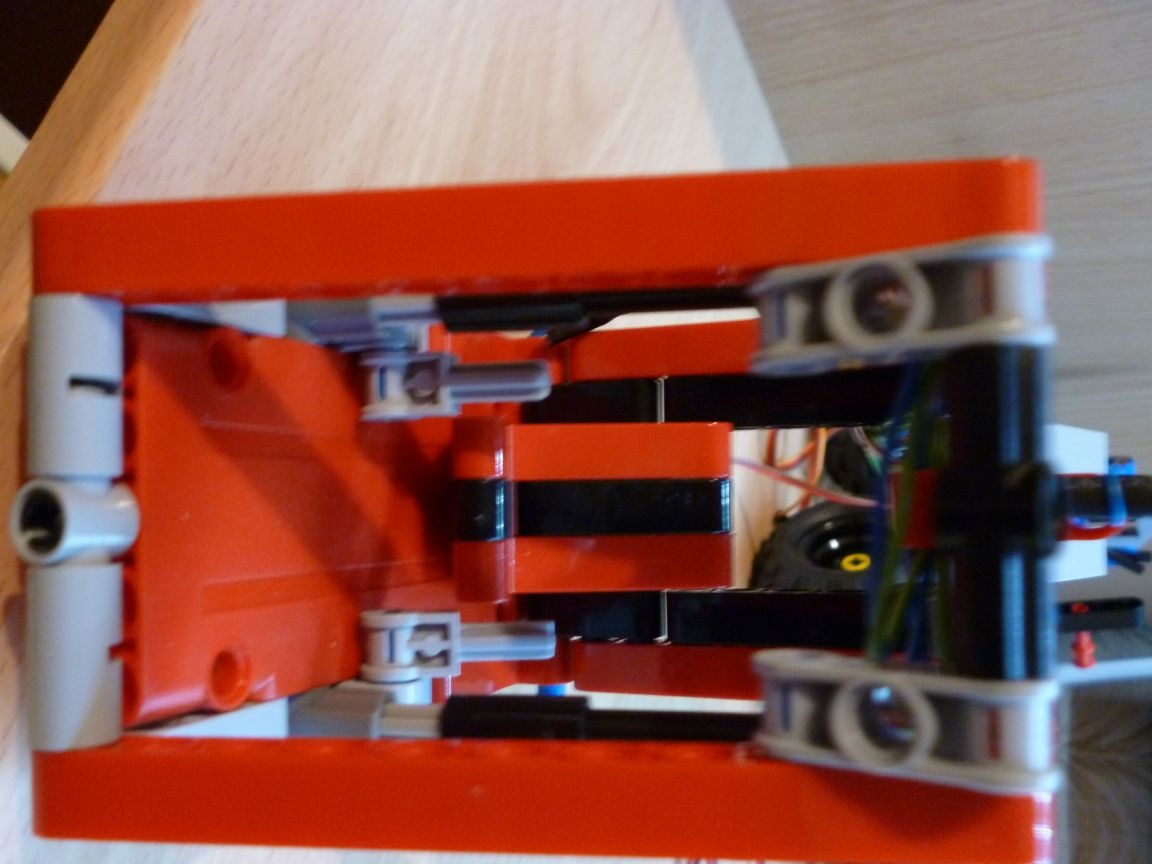
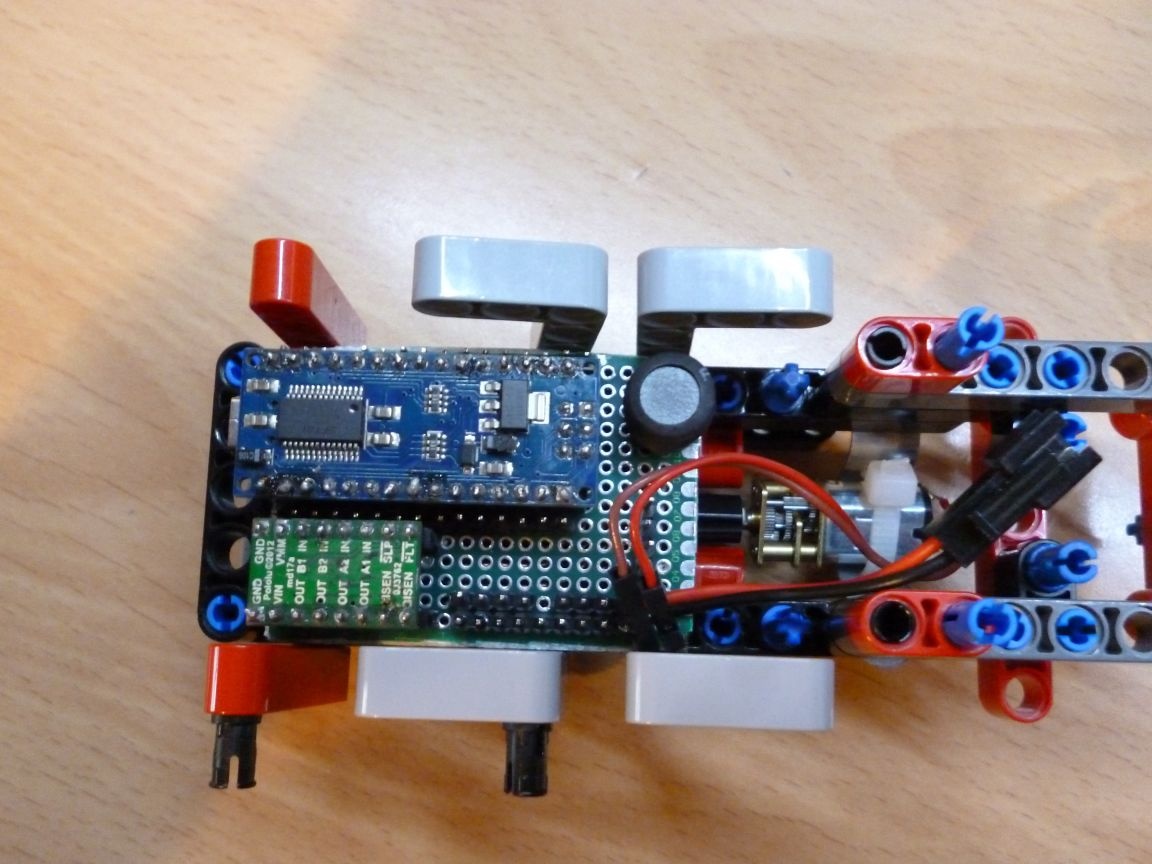
E ora posizioniamo la scheda sul telaio (rimuovendo le ruote per comodità):
Per l'alimentazione ho usato 4 batterie Ni-Mn 1.2v 1000mA collegate in serie e avvolte con nastro isolante. Li ho incollati su nastro biadesivo sotto il cofano posteriore della cabina.
Passaggio 6 installazione della cabina.
Colleghiamo il ricevitore IR, i motori e i diodi secondo lo schema, posizioniamo la cabina sopra il telaio, fissiamo la benna (è possibile realizzare qualsiasi benna):

Passo 7 firmware.
Sto programmando in un IDE Arduino. Per prima cosa devi compilare il mio firmware e, attraverso il terminale, guardare i codici del telecomando che intendi utilizzare. Puoi prendere qualsiasi telecomando IR, ad esempio, da un televisore o un lettore DVD. Facendo clic su un pulsante nel terminale vedremo il codice del pulsante premuto, annotarlo su un pezzo di carta. Lo facciamo con tutti i pulsanti su cui vogliamo programmare le azioni del caricatore. Quindi, modifica lo schizzo. Annotiamo i codici che abbiamo registrato per le azioni necessarie e li riproponiamo.
inserimento
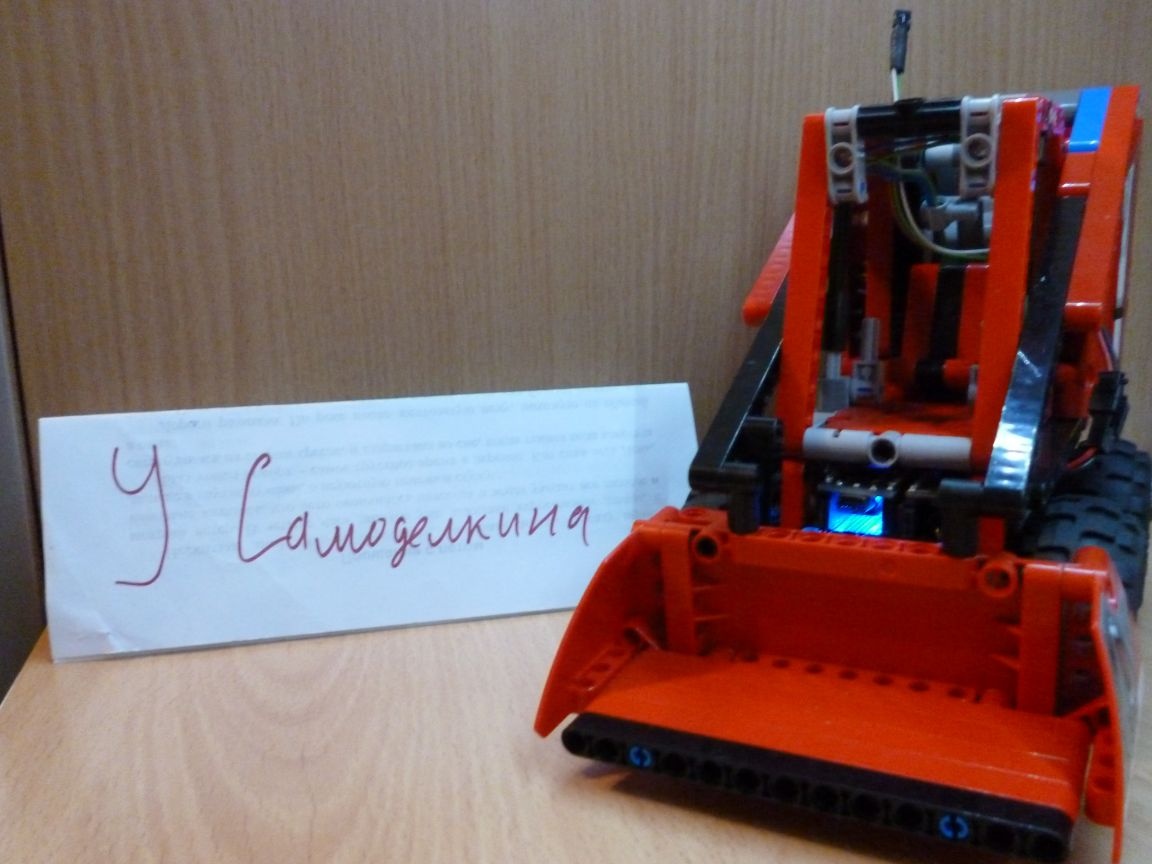
Caricatore video: