
Un dispositivo interessante è stato inventato e prodotto dal Maestro, questo è un apparecchio per piegare fili di qualsiasi forma. Fare molle è una delle sue caratteristiche. Questa macchina è in grado di piegare fili di 0,8 / 0,9 / 1 mm in qualsiasi forma 2D.
L'obiettivo principale della produzione di questa macchina era di automatizzare il processo di piegatura. Altre macchine fatte in casa non sono molto precise e le loro curve hanno un raggio abbastanza ampio.
Il secondo compito era quello di renderlo il più semplice possibile utilizzando parti e componenti comunemente disponibili. Alcune parti della macchina sono stampate su una stampante 3D e le parti metalliche possono essere acquistate presso il negozio.
A cosa serve il maestro per una simile macchina? Si interessa di realizzare figure a LED, fiocchi di neve, stelle, fiori, ecc. Nella loro fabbricazione sono necessarie parti identiche dal filo e questa macchina faciliterà la loro fabbricazione.
Guardiamo un breve video con un esempio del dispositivo.
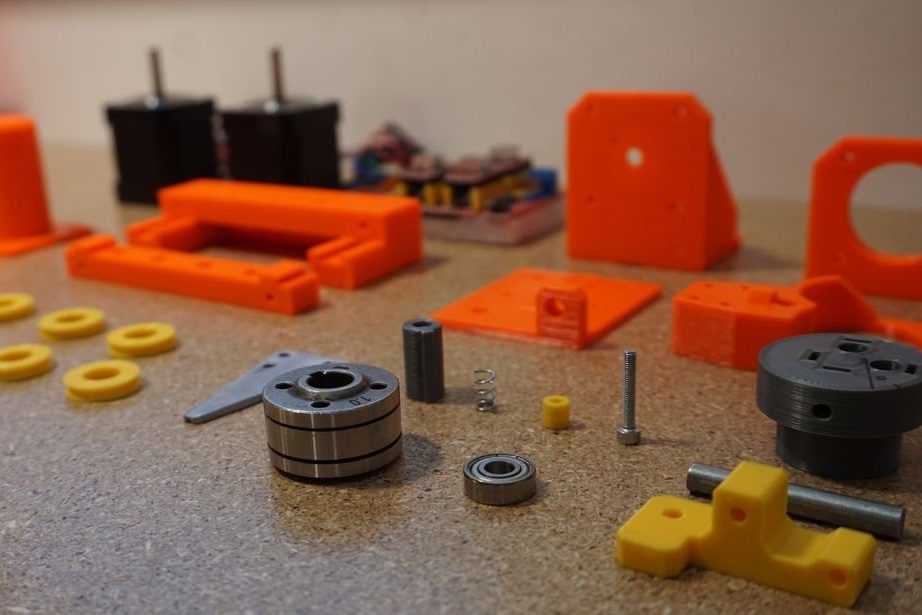
Quindi, per la fabbricazione di tale macchina, il maestro ha usato quanto segue
Strumenti e materiali:
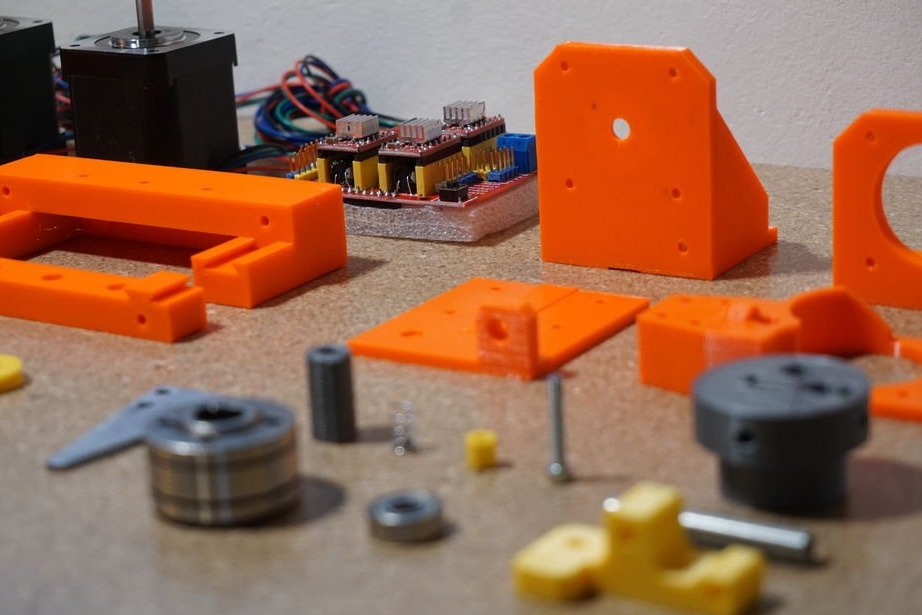
-3D dettagli (i file di stampa possono essere scaricati qui);
-Krepezh;
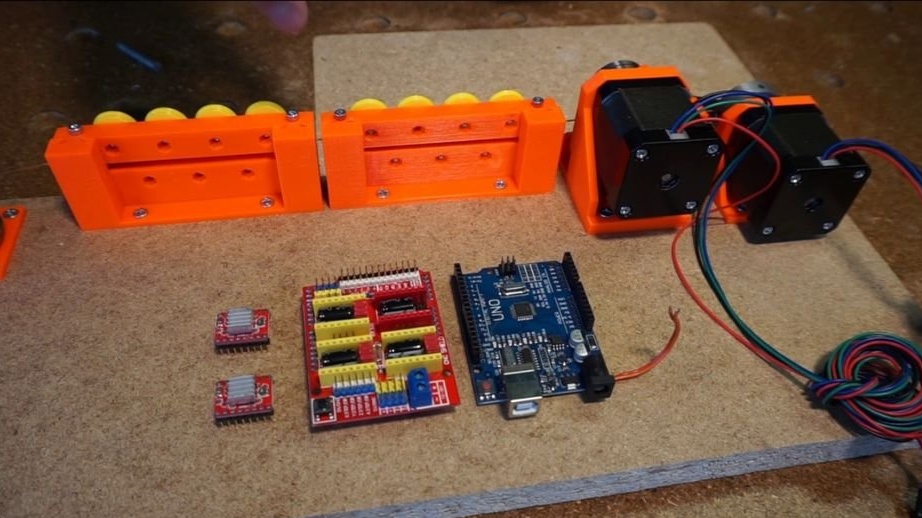
-Arduino UNO;
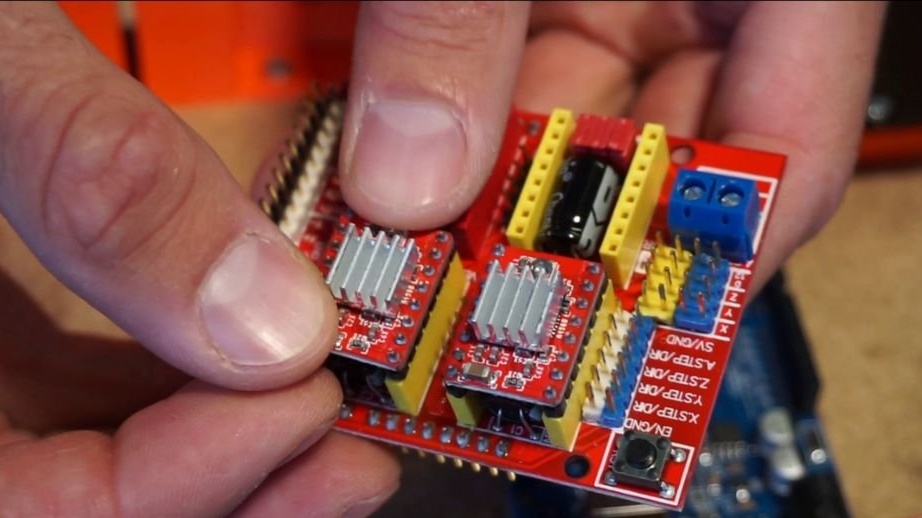
- Scheda di espansione per Arduino UNO;
- Driver passo-passo A4988 -2 pezzi;
-Passo motore NEMA17 -2 pezzi;
-12 V 3A alimentazione;
- meccanismo di avanzamento del filo;
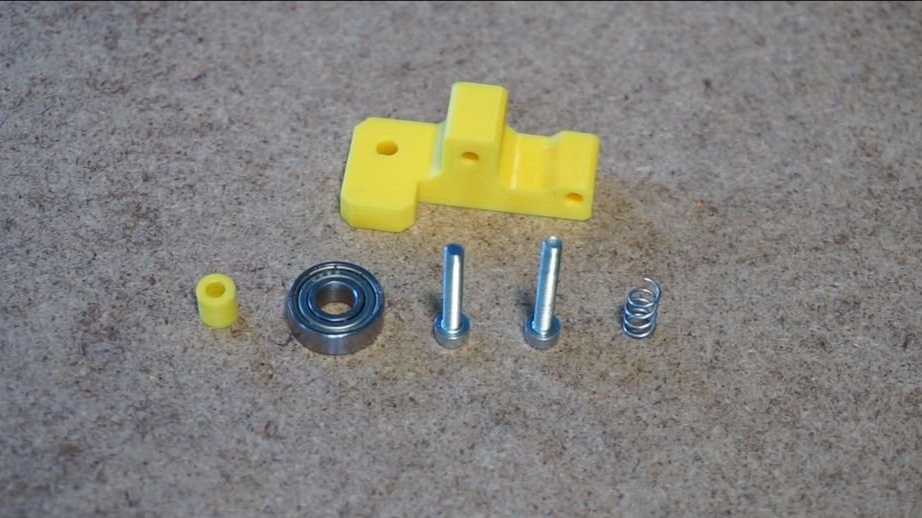
- Molla in acciaio 4x6 mm;
- Cuscinetto 3x10x4 mm;
-Porta 6x15x4 mm;
-6 mm tondino di acciaio;
- Lamiera di acciaio di spessore 2 mm;
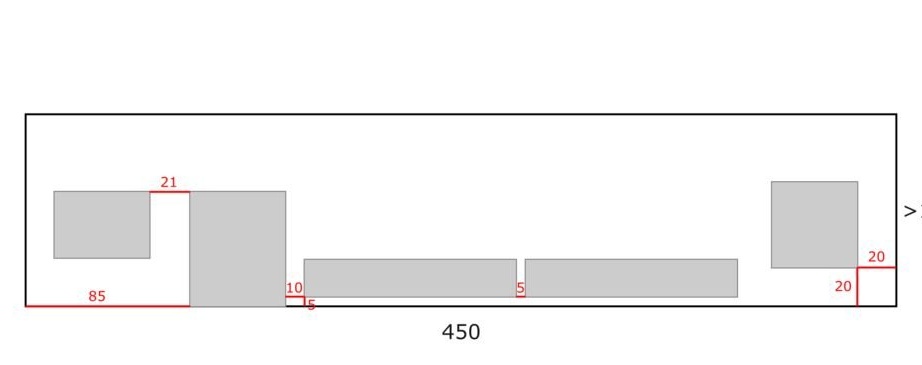
-Pannello di legno per la base 450x100 mm;
- cacciavite;
gon;
Primo passo: come funziona
Diamo un'occhiata a come funziona la macchina (da destra a sinistra).
Porta-bobina: contiene la bobina di filo per l'elaborazione della macchina.
Raddrizzatore: un set di 7 rulli in modo che il filo sia il più uniforme possibile. Lavorare con il filo dritto è fondamentale. Ecco perché due raddrizzatori.
Broccia: puoi trovare un meccanismo simile nella tua stampante 3D. Una serie di ingranaggi tira il filo dalla bobina attraverso i rulli e lo spinge verso la testa di piegatura. Il meccanismo di alimentazione deve avere una pressione del filo sufficiente a non scivolare. Più su questo più tardi.
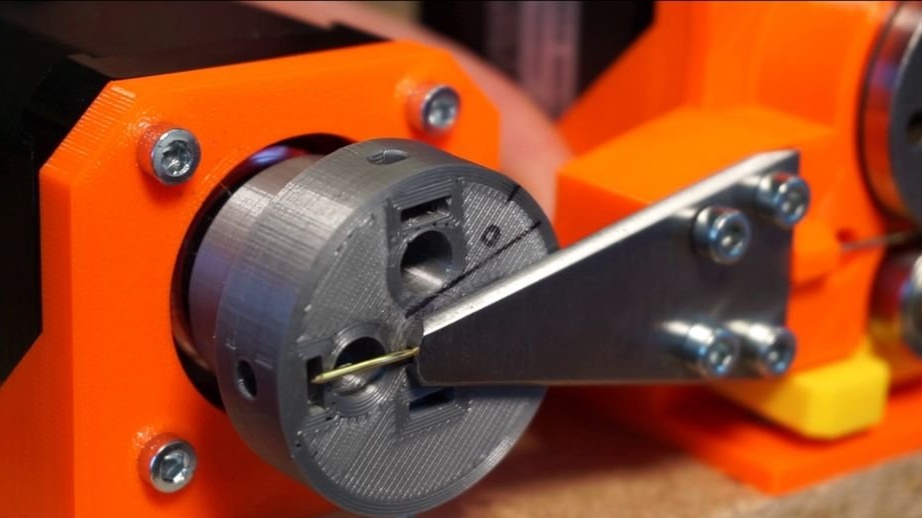
Piegatrice - piega il filo in una forma programmata.
Tutto questo è controllato da un Arduino UN con uno scudo CNC.Un comando viene inviato ad Arduino dal computer e li traduce in comandi per motori passo-passo.

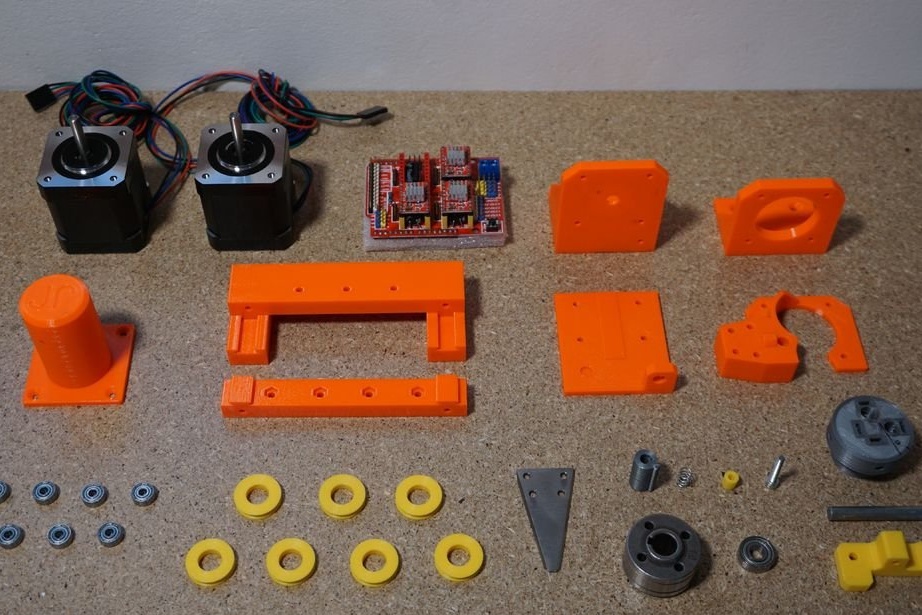
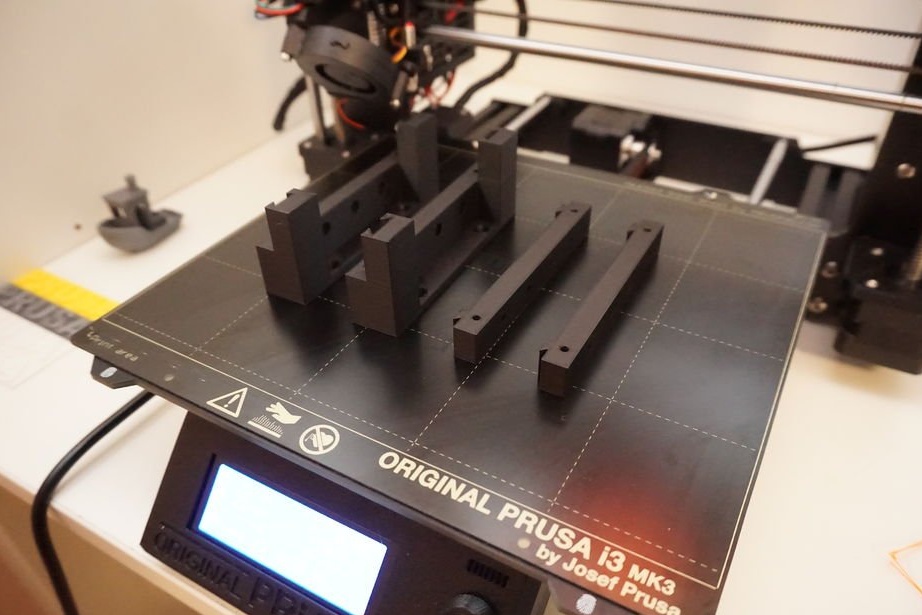
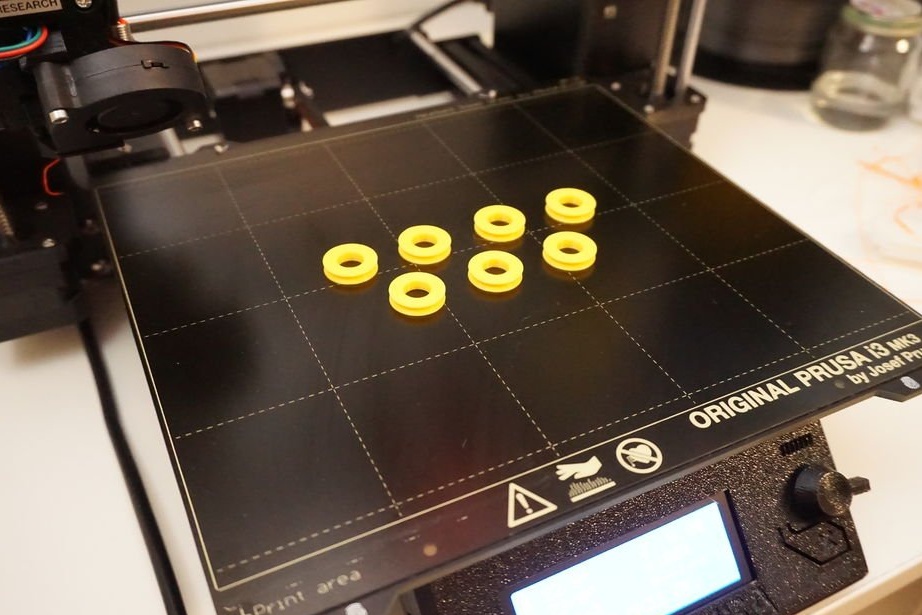
Fase due: stampa di parti
È necessario stampare i seguenti dettagli e nella seguente quantità (per evitare confusione, il testo originale):
piegatrice
Testa dello strumento
Telaio del motore
Alimentatore
Telaio del motore
Telaio inferiore
Guida filo
Carrello folle
Distanziale folle
Distanziale per ingranaggi di alimentazione
Piastra di piegatura (modello)
Rulli raddrizzatori (2x)
Struttura letto (2x)
Telaio ingranaggi superiori (2x)
Rullo (14x)
Portarocchetto
Altezza dello strato quando si stampa 0,15 mm. 40% di riempimento. La stampa richiede 2 giorni.
Fase tre: piegatrice
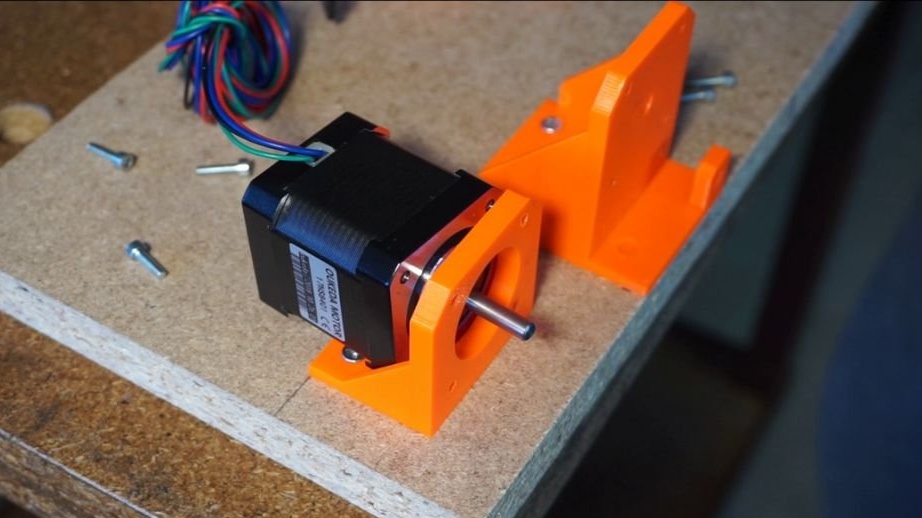
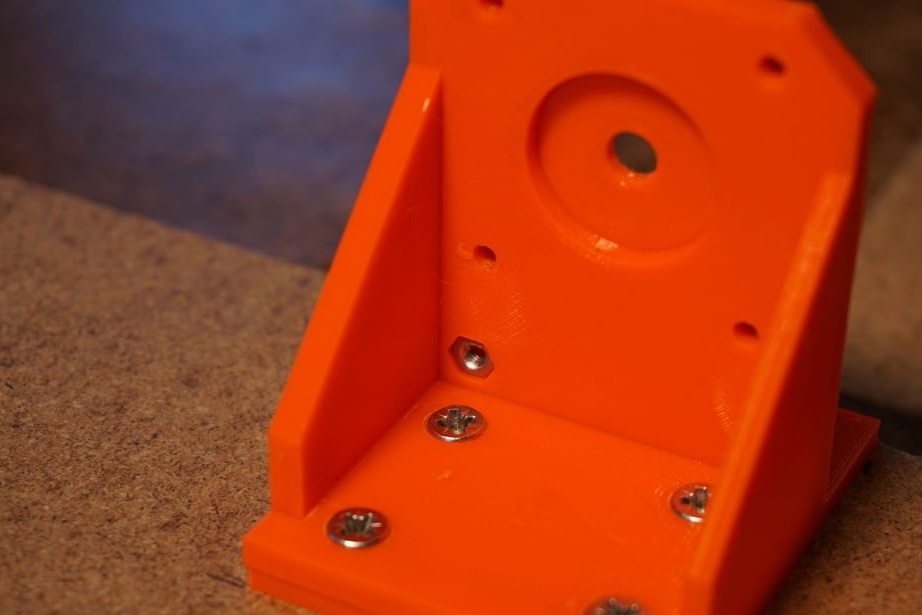
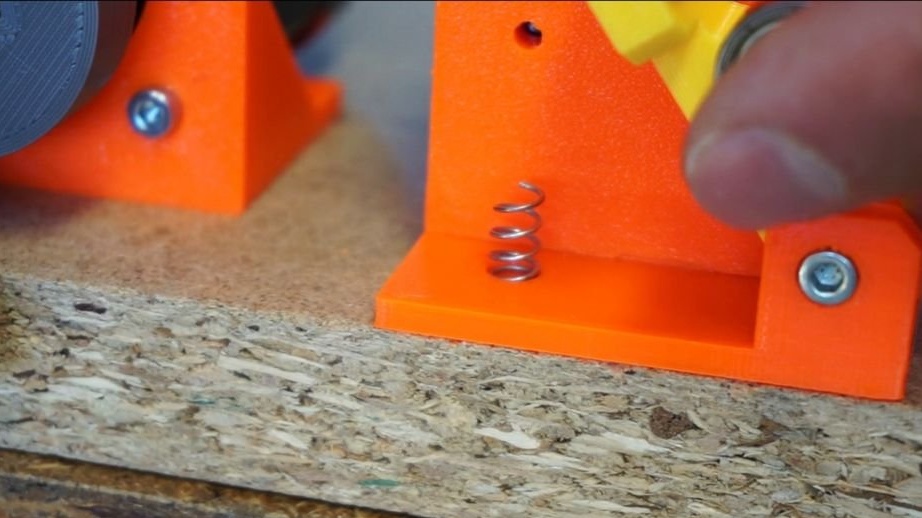
Il master avvita due telai alla base. È importante installare entrambi i frame come mostrato nel disegno.
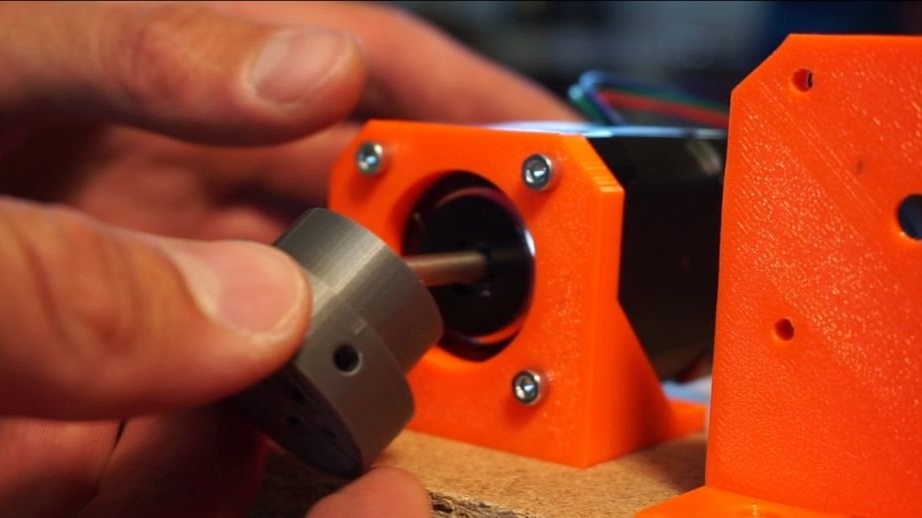
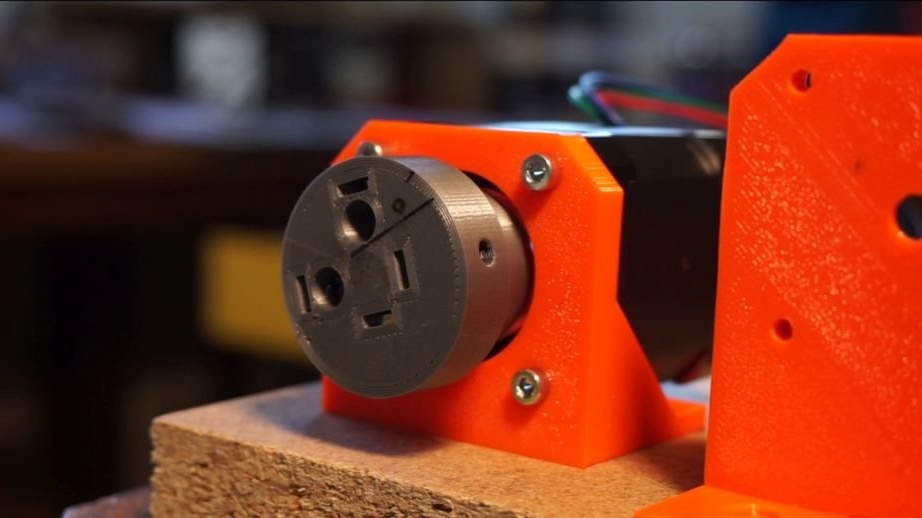
Fissa il motore passo-passo al telaio. Fissa la testa all'albero del motore.


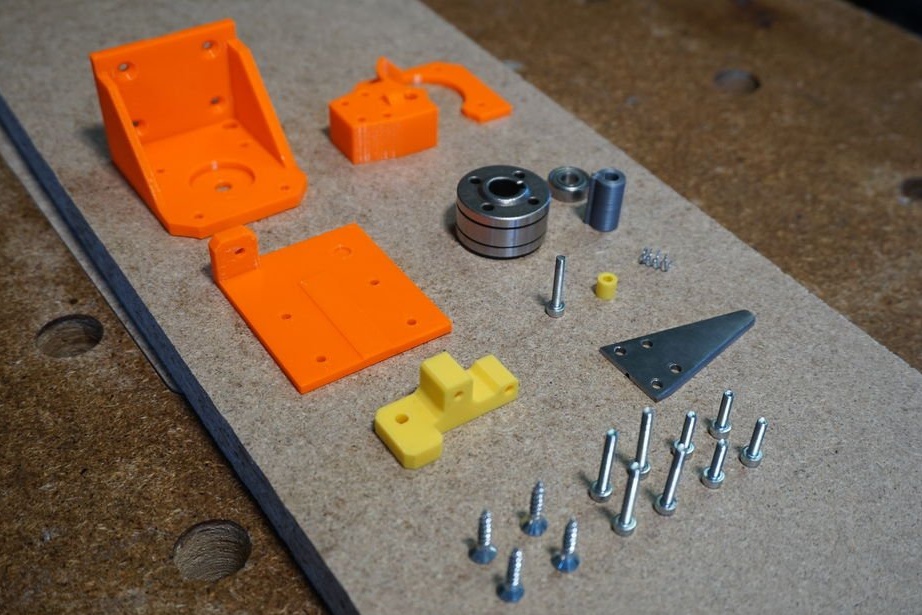
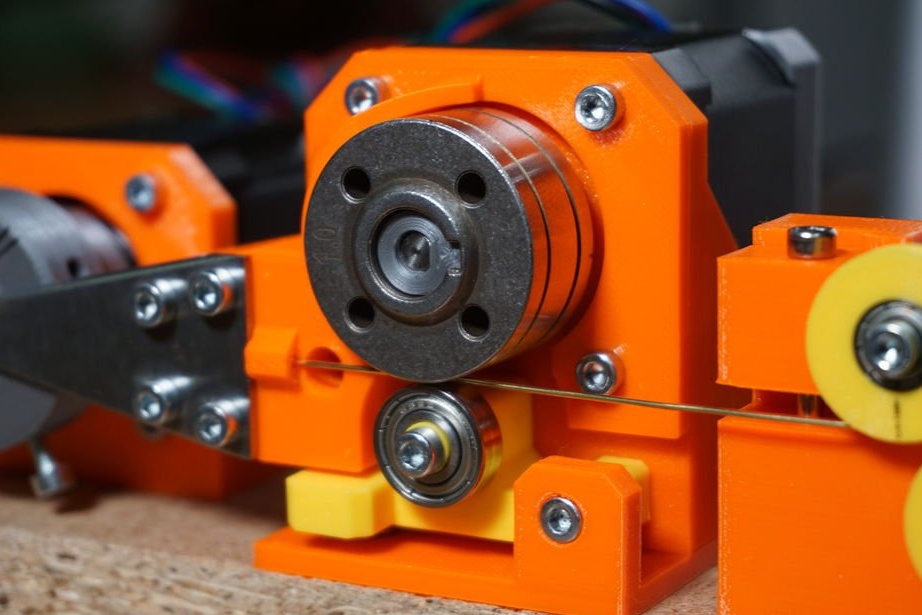
Quarto passaggio: broccia
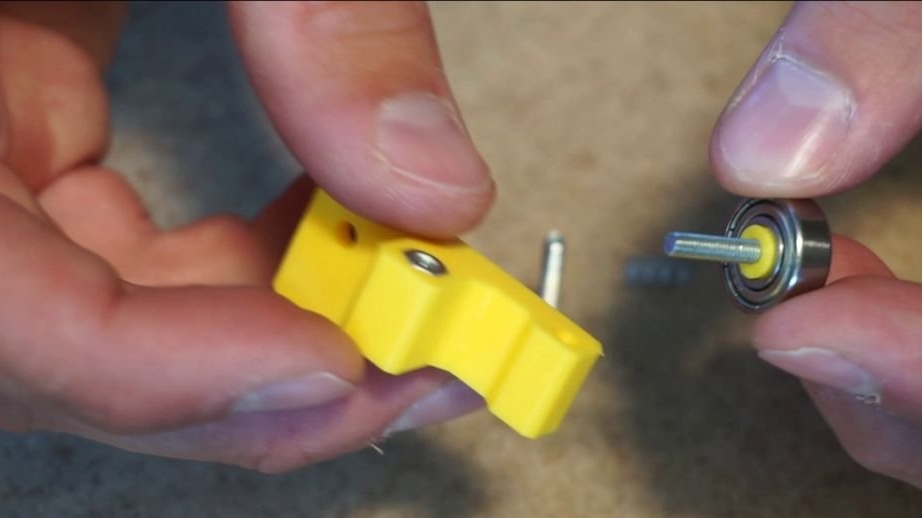
Il telaio è già installato, quindi il primo passo nella creazione di un meccanismo di avanzamento è quello di costruire un carrello per l'ingranaggio intermedio, che premerà il filo al meccanismo di avanzamento. Rimuovere la guarnizione di plastica all'interno del cuscinetto 6x15x4 mm. Installare il cuscinetto sul bullone M3x20. Installare il dado M3 nel carrello e avvitare il cuscinetto sul bullone. Accertarsi che il cuscinetto ruoti liberamente. Inserire il secondo dado M3 nel telaio del motore (lato motore nell'angolo in basso a sinistra) e avvitare il carrello attraverso la staffa piccola usando il bullone M3x20. Non stringere eccessivamente il bullone; il carrello deve muoversi liberamente. Sollevare il carrello e inserire la molla nel foro sottostante.
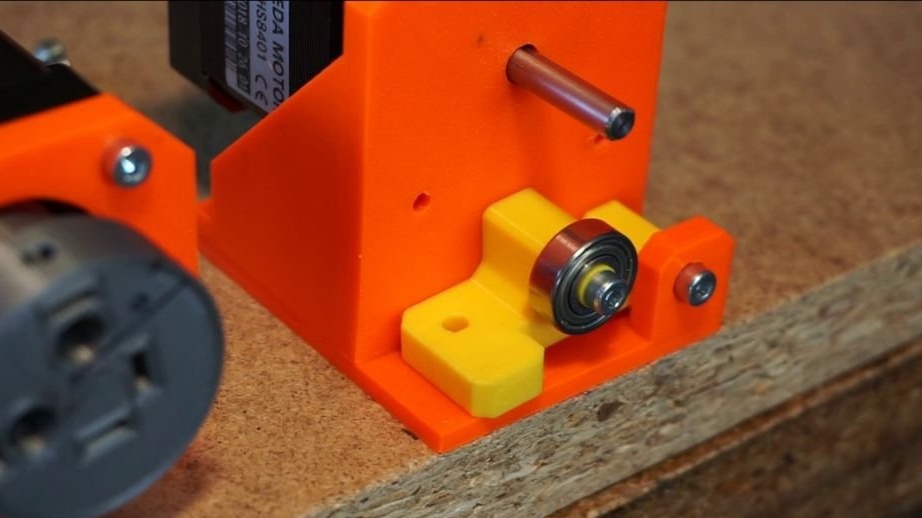
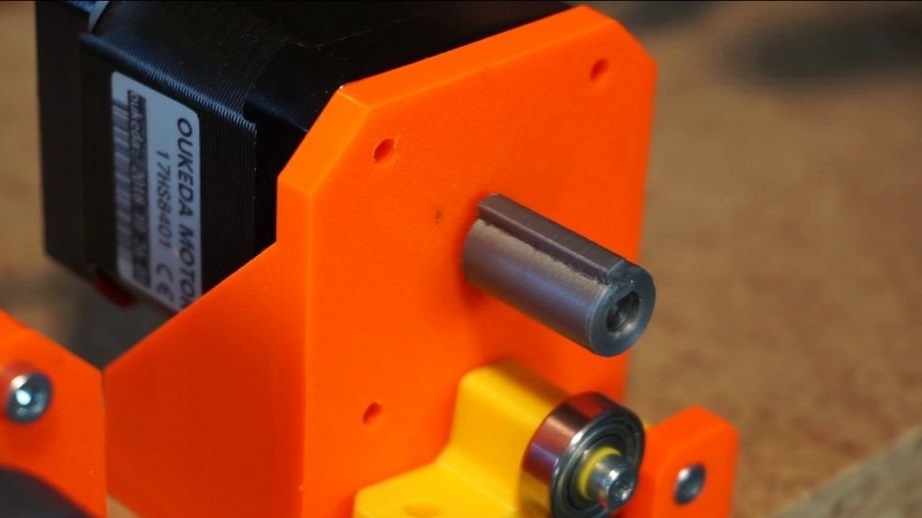
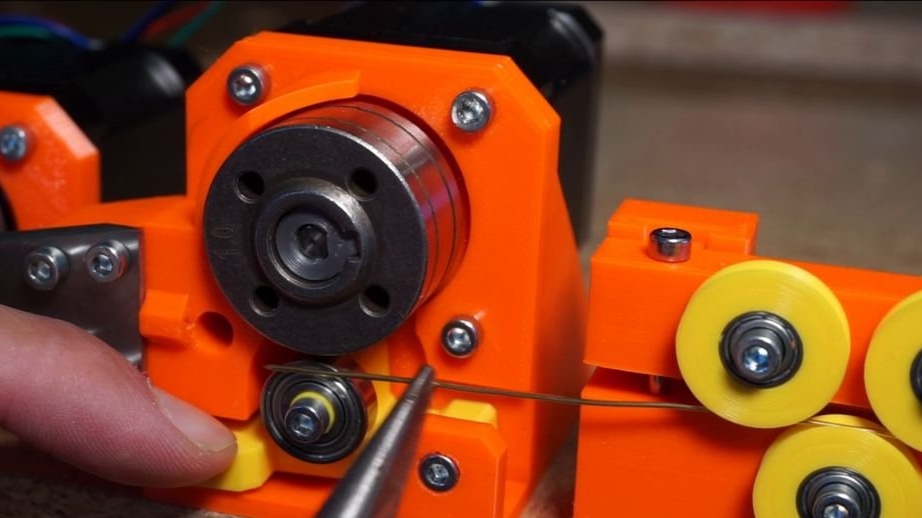
Prendere il secondo motore passo-passo e installarlo nel telaio del motore. Non avvitare ancora. Premere il distanziatore del meccanismo di alimentazione sull'albero motore e installare il meccanismo di alimentazione.
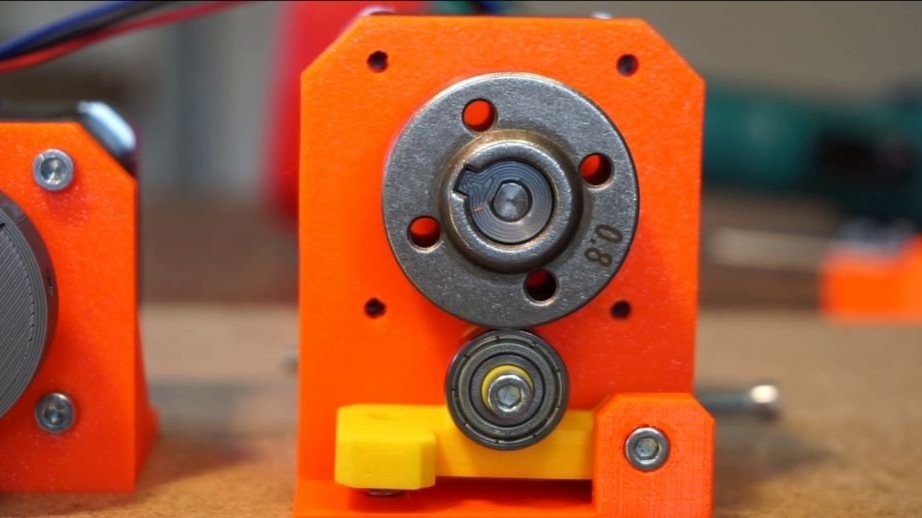
Il meccanismo di alimentazione utilizzato dal master viene prelevato da una saldatrice MIG. Il meccanismo ha due rientranze sulla bobina. Uno per filo da 0,8 mm e uno per filo da 1 mm. A differenza degli ingranaggi (in precedenza il master ha cercato di alimentare il filo con loro), questo meccanismo non lascia tracce sul filo.
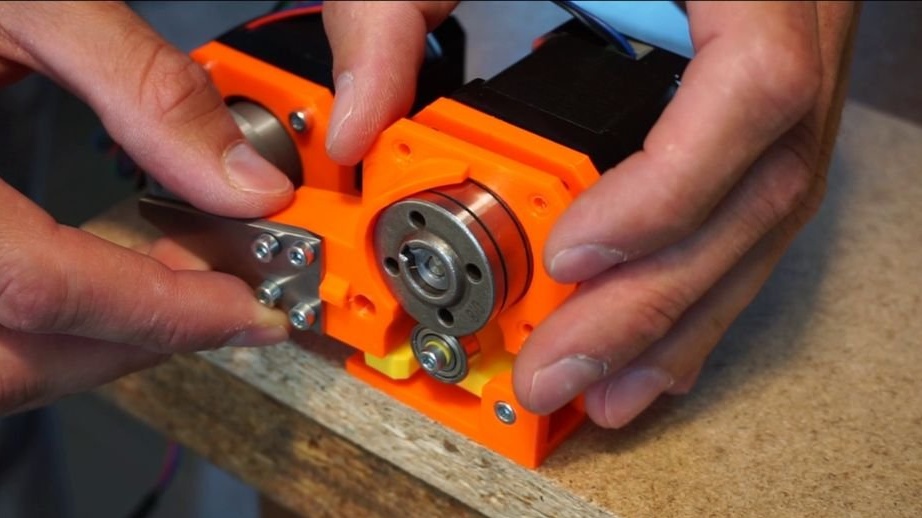
L'alimentatore e il dispositivo di piegatura sono collegati da una piastra di piegatura: una piastra metallica spessa 2 mm con una piccola scanalatura sulla parete posteriore, che alimenta il filo direttamente al centro della testa di piega per una piegatura perfetta. Per la stampa, c'è una piastra di piegatura in plastica che funziona alla grande, ma si consuma rapidamente e richiede frequenti sostituzioni. Puoi usarlo o puoi fare una piastra di metallo su di esso.
Quindi, prendi la parte in plastica del guidafilo e installa i quattro dadi M3 nei fori sul lato posteriore. Ora avvitare la piastra di piegatura con i bulloni M3x20. Posizionare il guidafilo di fronte al telaio del motore del meccanismo di alimentazione e fissarlo al motore con quattro bulloni M3x12. Regola la posizione della piastra di piegatura. Dovrebbe essere esattamente al centro della testa di piegatura.
La broccia è pronta. Se hai un filo dritto, puoi usare subito il filo. Altrimenti, hai bisogno di un raddrizzatore.





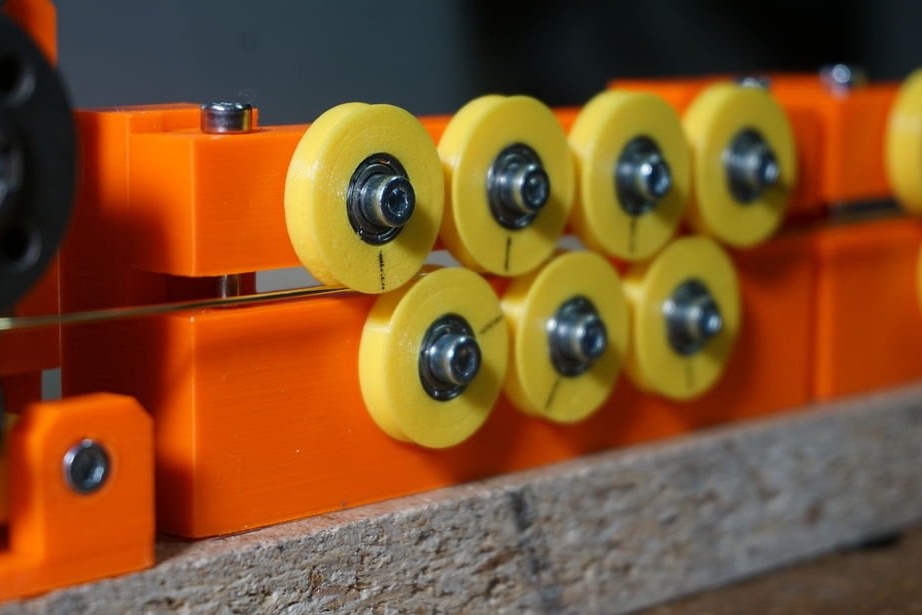
Fase cinque: broccia
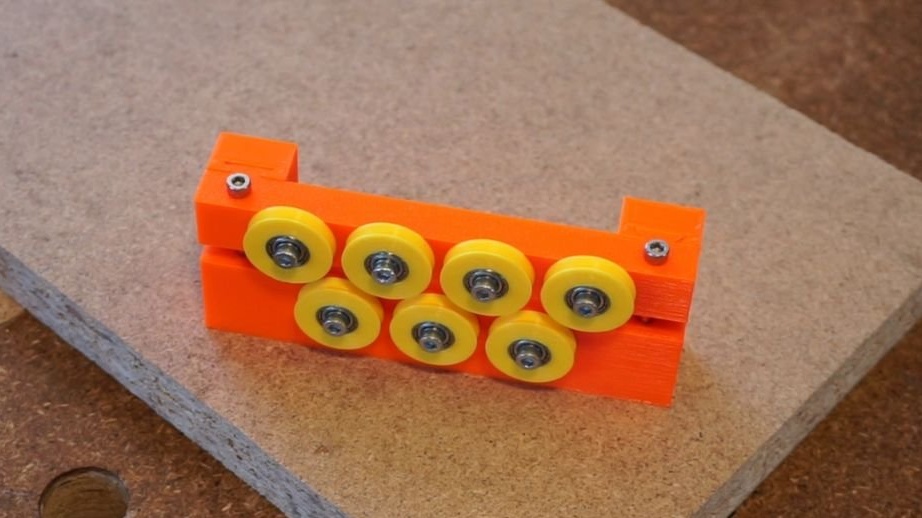
Il filo viene generalmente fornito in forma di bobina. Per piegare il filo, devi prima raddrizzarlo. Il raddrizzatore è composto da 7 rulli (4 nella parte superiore e 3 nella parte inferiore), che possono essere premuti uno contro l'altro per garantire la corretta tensione del filo. Inoltre impedisce la torsione del filo durante la piegatura.
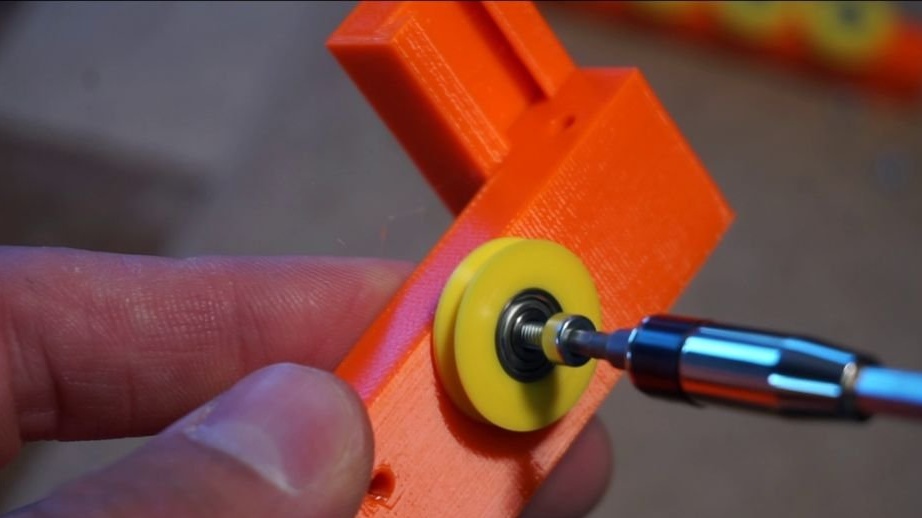
Avviare il montaggio con le rotelle a rulli. Innanzitutto è necessario premere il cuscinetto 3x10x4 mm nell'alloggiamento del rullo in plastica. Inserire il bullone M3x12 su un lato e la rondella M3 sull'altro lato del rullo. La rondella eviterà l'attrito della ruota sul telaio. Avvitare tutti i rulli sul telaio inferiore e superiore. Collega entrambi i frame. Fissare i telai con due bulloni M3x40.
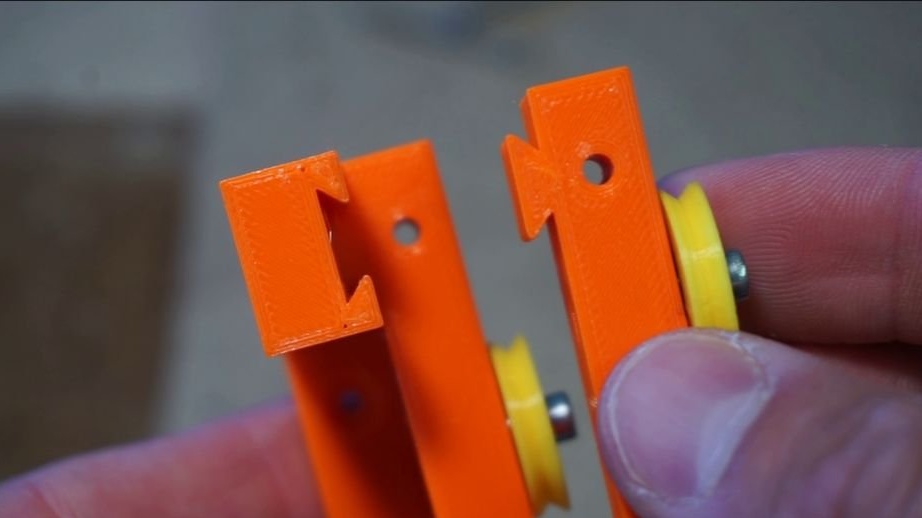
Puoi risparmiare qualche soldo sui cuscinetti a rulli. Stampa la parte Straightener_RollerNoBearing anziché la Straightener_Roller. Ma le prestazioni saranno un po 'peggiori.
Per risultati ancora migliori, utilizzare 2 piastre per fila.




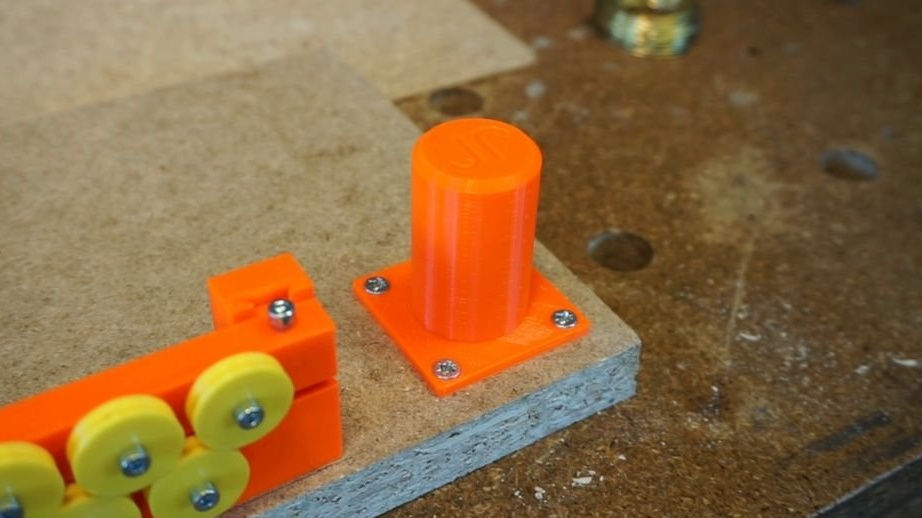
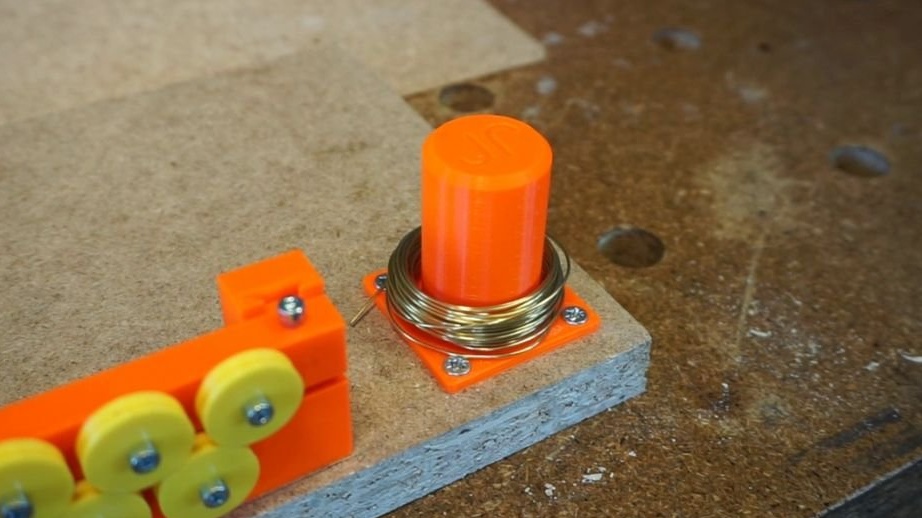
Fase sei: supporto bobina
Il portarocchetto è un semplice cilindro che trattiene il filo e gli consente di srotolarsi dalla bobina. Avvitarlo alla base con quattro viti 3x16.
Passo sette: connettiti
Innanzitutto, il filo di curvatura deve essere alimentato alla macchina. Il master utilizza un filo di ottone da 0,8-1 mm a forma di bobina.
Il filo passa dalla bobina attraverso i rulli. Basta attaccare il filo tra i rulli. Quindi passa attraverso la broccia.Regolare la posizione del meccanismo di alimentazione in modo che la grondaia sia a filo con la superficie della guida del filo. Premere la leva nella marcia intermedia e spingere il filo attraverso l'alimentatore fino alla piastra di piegatura. Rilasciare la leva e lasciarla premere contro il meccanismo di alimentazione. Ora puoi scorrere manualmente il meccanismo di avanzamento per spingere il filo verso la testa di piegatura. Regolare attentamente la tensione sui rulli serrando i bulloni. I rulli non devono ruotare liberamente, ma il filo deve muoversi senza intoppi.
In secondo luogo, elettronica Anche il controller deve essere collegato. Il master utilizza il classico Arduino UNO con CNC e due driver del motore passo-passo A4988. Il motore di avanzamento è collegato all'asse Z e il motore della testa di piega all'asse X. I driver sono configurati per la massima precisione possibile - vengono inseriti tutti e 3 i ponticelli sotto i driver del passo. Tutto dovrebbe essere collegato a un alimentatore da 12V 3A.

Passo otto: firmware
Ora puoi provare ad avviare la macchina. Master utilizza grbl insieme a cncjs. Sono progettati per funzionare su una fresatrice, ma funzionano perfettamente con qualsiasi tipo di CNC. GRBL è il firmware che è necessario installare in Arduino UNO. Esiste un buon client Web cncjs per l'impostazione dei parametri. Installa GRBL su Arduino e cncjs sul tuo computer.
Dopo l'installazione, è necessario connettersi alla macchina e verificarne il funzionamento premendo i pulsanti Z +/- o X +/-.
Ora devi calibrare: 10 mm = Z10 $ 102 = 34 $ 110 = 1600 $ 111 = 600 $ 112 = 1000 $ 120 = 500 $ 121 = 350 $ 122 = 350
Questo è un insieme di valori che determinano come convertire il numero indicato nel codice in movimento del motore. Ad esempio, se si imposta l'asse Z su 30, in realtà significa che spingerà 30 mm di filo attraverso l'alimentatore.
Abbiamo calcolato la calibrazione, ora è necessario impostare la testa di piegatura sulla posizione zero.
Il movimento della testa di piega è determinato dalla nota posizione fissa della testa di piega. In questo caso, questa è la posizione in cui il perno di piegatura sulla testa è rivolto verso sinistra. Vedi la foto
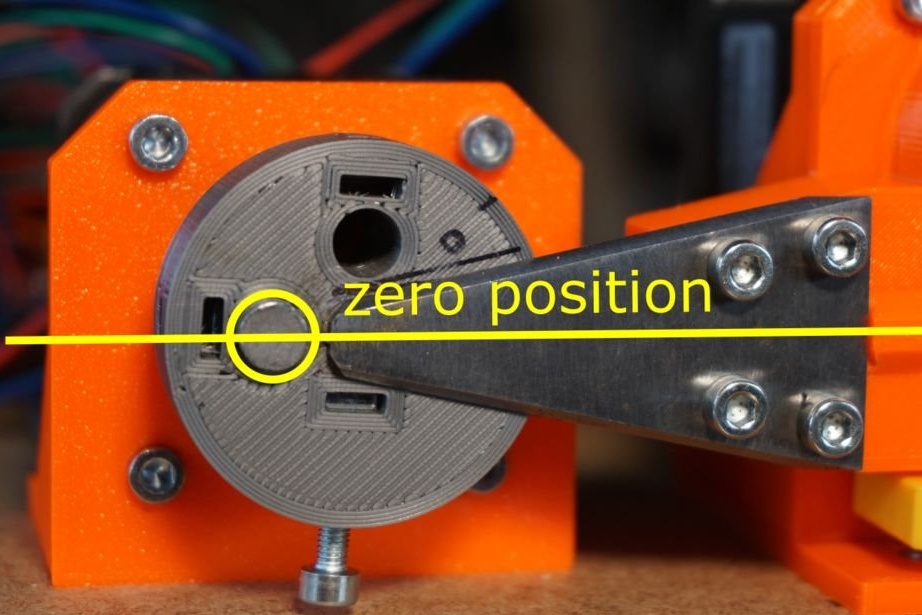
Si consiglia di annotare questa posizione zero sulla testa per poterla riportare nella stessa posizione. Non è necessario che il meccanismo di avanzamento determini la posizione zero, poiché si sposta sempre rispetto alla posizione corrente.
Ora diamo un'occhiata a un esempio di Gcode. Sembra così:
G91
G1 Z1
G90
G1 X2
G1 X-6Ed ecco per cosa è scritto ogni valore:
G91 - usa le coordinate relative (necessarie prima di qualsiasi movimento lungo l'asse Z)
G1 Z1 - alimentare un filo da 1 mm
G90 - usa coordinate assolute (necessarie prima di qualsiasi movimento lungo l'asse X)
G1 X2 - ruota la testa di piegatura in posizione 2 (questo numero non ha unità)
G1 X-6 - ruotare la testa di piegatura in posizione -6
Se ripeti i passaggi 100 volte, otterrai un codice di piega a molla. Altri file di origine sono disponibili di seguito.
hex-inner.gcode
hex-outer.gcode
spring.gcode
La macchina è pronta Ma il maestro continuerà a lavorare per migliorarlo.
L'intero processo di produzione di tale macchina può essere visto nel video.