

Nel video puoi vedere come funziona il robot. Cambia gradualmente colore durante il funzionamento.

Materiali e strumenti per il montaggio del robot:
- Staffe di montaggio a forma di U;
- quattro batterie LR44 da 1,5 V ciascuna;
- LED RGB multicolore con funzione di commutazione;
- tubi isolanti;
- puntina da disegno in acciaio;
- motore a bassa tensione tipo RF-300CA;
- pulsante per accendere il robot (con due cavi);
- fili per il collegamento del motore;
- LED di allarme lampeggiante.
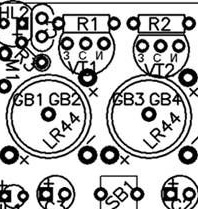

Per quanto riguarda il necessario elettronico elementi, sono mostrati in figura. Il circuito stampato è costituito da un foglio di alluminio di PCB, le sue dimensioni sono solo 30X30 mm. L'autore raccomanda anche l'uso di piccoli condensatori polari per il montaggio.
Processo di produzione di robot
Primo passo. Schema schematico del robot
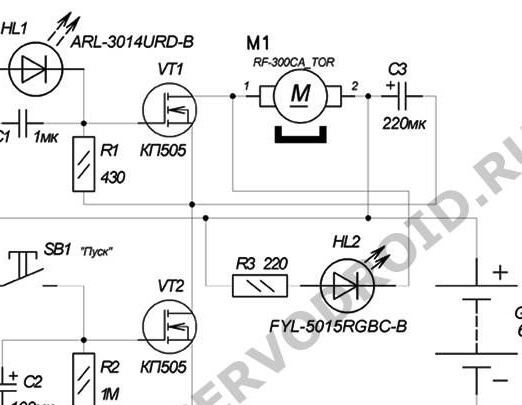
Il circuito del robot può essere visto nella figura. Dopo aver inserito la batteria, il robot è spento, per accenderlo, premere il pulsante SB1. Immediatamente dopo, il condensatore C2 viene caricato immediatamente. La piastra positiva dal condensatore è collegata alla porta del transistor VT2 ad effetto di campo. A questo proposito, quando viene raggiunta la soglia di commutazione, la resistenza del canale sorgente di drain di questo canale diminuisce istantaneamente e si forma una potenziale carica negativa allo drain. Bene, ciò che accade dopo può essere visto in modo più dettagliato nel diagramma.
Secondo passo Montare LED RGB
Il LED sotto il numero 1 è montato sul circuito stampato. Nel disegno, questa posizione è denominata HL2. Dopo aver installato il LED, le sue conclusioni devono essere piegate in modo tale che il LED sia diretto di lato. Pertanto, durante il funzionamento, il LED non brillerà, ma lateralmente, illuminando le pareti. In quale direzione la luce brillerà è indicata da una freccia nera.

Terzo passo Montare le staffe di montaggio della batteria
Per fornire il contatto tra la batteria e il robot, vengono utilizzati i perni di spinta.Un pulsante è installato al centro, nel diagramma è contrassegnato come GB1, GB2 e il secondo è impostato sulla posizione GB3, GB4. Per fissare in modo sicuro i contatti, i pulsanti sono saldati con una grande quantità di saldatura.


Le batterie sono installate sul pulsante di metallo sotto il numero 3. Le batterie sono fissate con un dispositivo di fissaggio a forma di U, sul quale sono usurati isolanti dai tubi. La parte superiore della staffa deve essere leggermente piegata con un arco verso il basso, questo permetterà alle batterie di essere premute sul contatto inferiore. Sono necessari tubi isolanti in modo che le facce verticali delle batterie non entrino in contatto con quelle orizzontali.
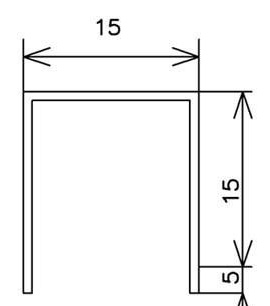
Per realizzare un dispositivo di fissaggio a forma di U, è necessario utilizzare due graffette. Devono essere piegati a forma di U, come indicato nel disegno. È possibile utilizzare qualsiasi tubo, qui viene utilizzato il cloruro di polivinile. La loro altezza dovrebbe essere uguale all'altezza delle batterie.
Installare la staffa mediante saldatura, per questo è necessario stagnare le sue estremità. Per stagnare, è necessario utilizzare un flusso neutro non lavante.
Fase quattro Installa il motore
Il motore è installato sul lato della scheda dove passano i binari, si trova con l'albero verso il basso. Per fissare il motore, è possibile utilizzare colla a caldo o nastro biadesivo. Ma prima di montare saldamente il motore, è necessario collegarlo e verificare che l'intero sistema funzioni.

Fase cinque Installazione e test fatto in casa
Dopo aver assemblato il robot, è possibile testare e configurare. Per fare ciò, è necessario installare le batterie nel robot, che vengono installate al posto di GB1, GB2 e GB3, GB4. In questo caso, l'elettronica deve essere spenta. Dopo aver installato le batterie, il robot può essere acceso, questo viene fatto usando il pulsante SB1. Dopo averlo premuto, il motore dovrebbe iniziare a funzionare, il LED HL1 lampeggerà e anche il LED RGB si accenderà.
Dopo qualche tempo, il robot si spegnerà automaticamente, si fermerà e tutti i diodi si spegneranno. Viene quindi acceso come per la prima volta, premendo un pulsante.

Per regolare il tempo del robot, è necessario sperimentare i valori del resistore R2 e del condensatore C2, che sono responsabili di questa funzione. Se è necessario impostare il funzionamento massimo del robot, la capacità del condensatore dovrebbe essere il più ampia possibile. In un modo così semplice puoi assemblare un robot così interessante.