Oggi voglio condividere il mio prossimo homebrew ramoscello. Si basa su Lego e Arduino. Per il controllo, useremo un telecomando con un trasmettitore 433 MHz. Questa volta volevo fare una corsa un'auto. avvio di Let:
- Lego Technic 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- Modulo di comunicazione radio 433 MHz
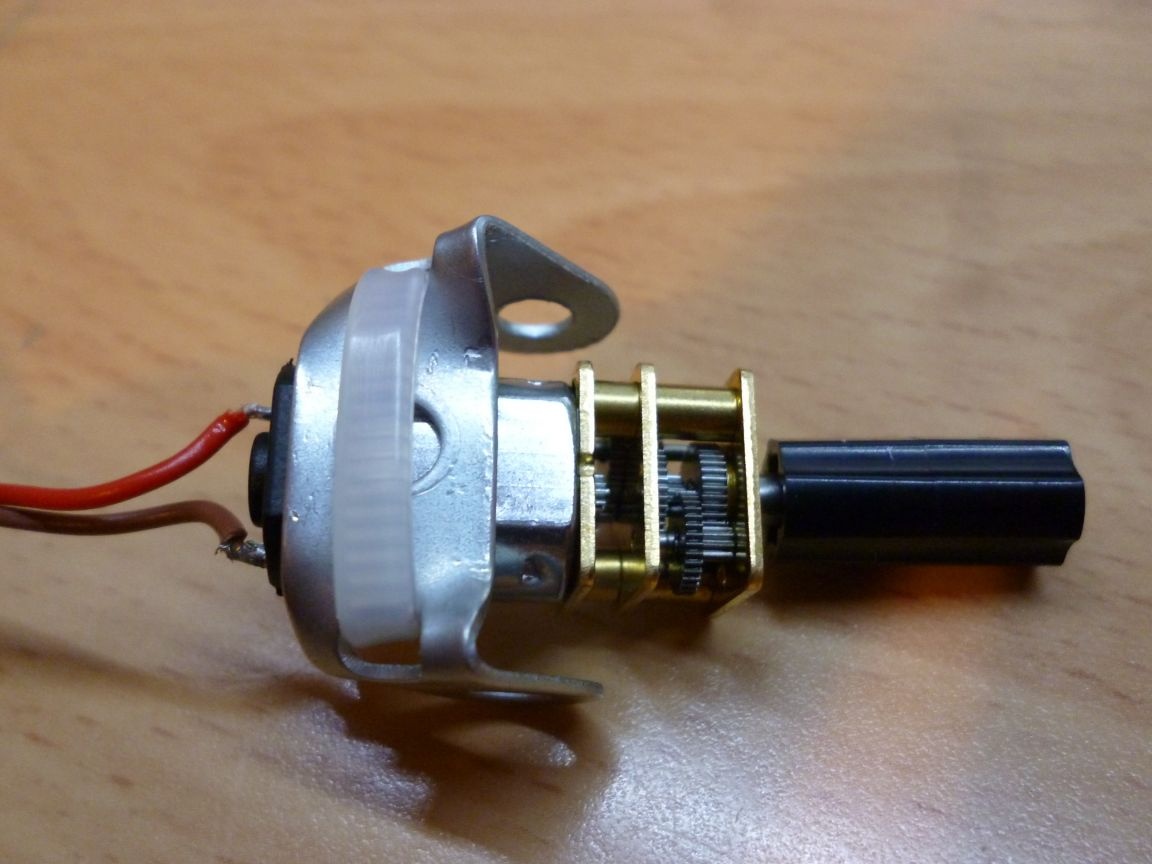
- Motoriduttore 200 rpm, con diametro dell'albero di 3 mm
- 2 LED
- 2 resistori 150 ohm
- Condensatore 10v 1000uF
- 2 pettini a fila singola PLS-40
- 2 connettori PBS-20
- Induttore 68mkGn
- 6 batterie NI-Mn 1.2v 1000mA
- Connettore papà-mamma a due pin da collegare
- Homutik
- Fili di diversi colori
- saldatura
- Colofonia
- saldatore
- Bulloni 3x40 e dadi e rondelle per loro
- Bulloni 3x20
Step 1 assemblare la custodia.
È necessario assemblare la nostra macchina secondo le istruzioni Lego 42022 la seconda opzione con qualche raffinamento. Eseguiamo tutte le azioni da pagina 3 a 6. Non abbiamo bisogno di un meccanismo ad ingranaggi. Inoltre, non è necessario assemblare il motore Lego. Tuttavia, sarà necessario raccogliere i supporti del motore alle pagine 14-19, ad eccezione di ingranaggi e alberi. Successivamente, raccogliamo tutto dalle pagine 20 a 74, ad eccezione della leva a pagina 25.
Step 2 meccanizza il corpo.
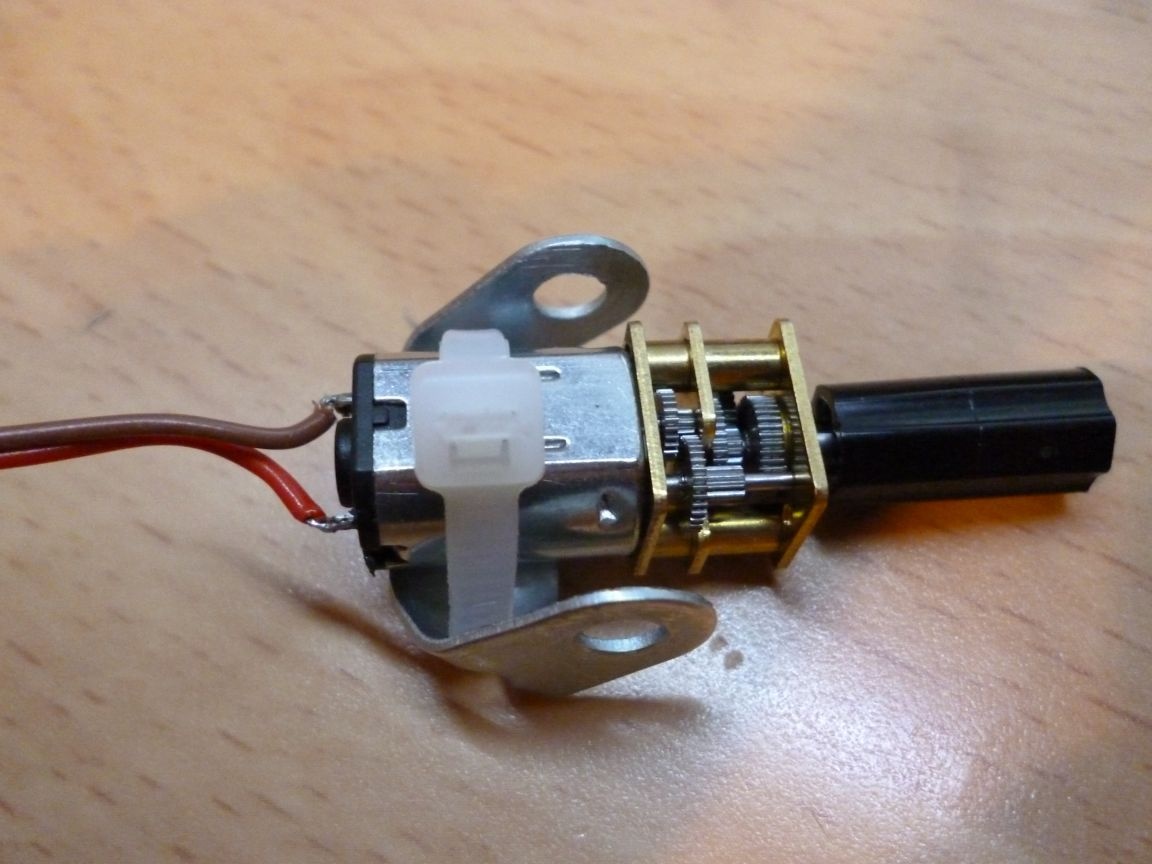
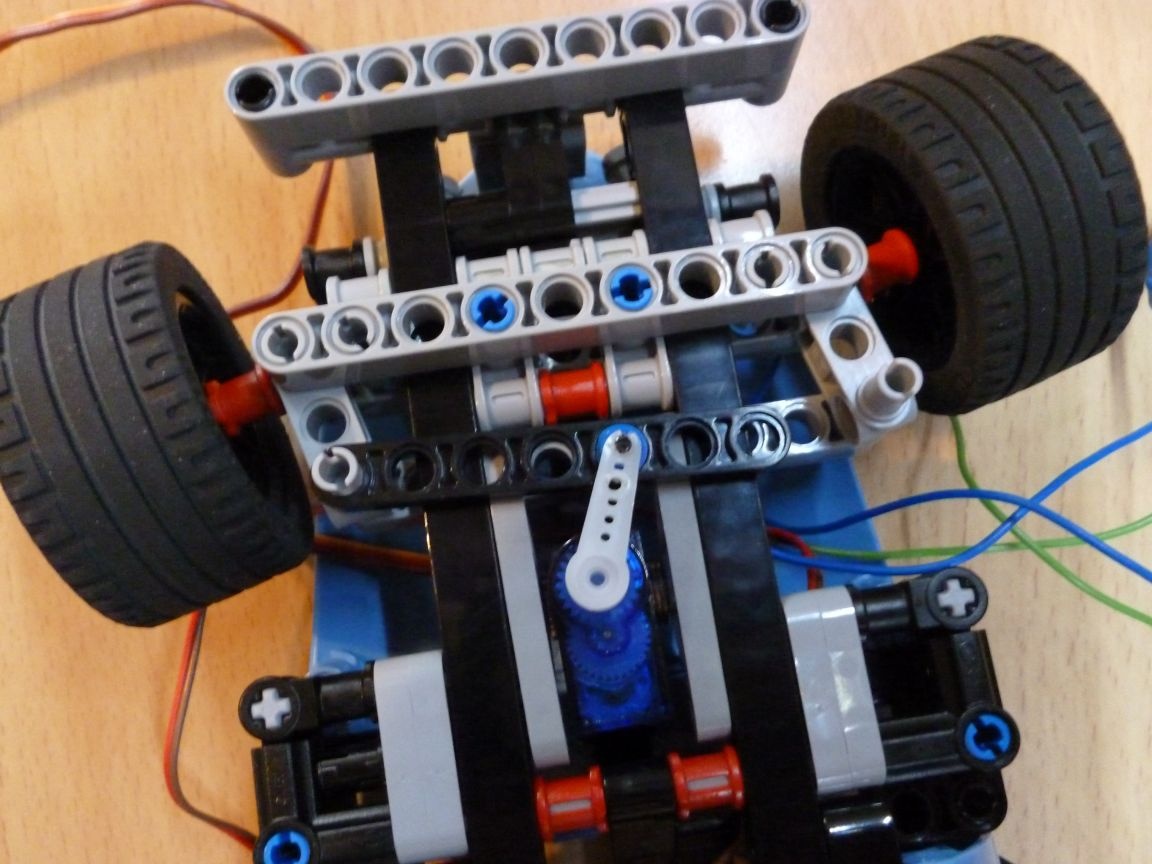
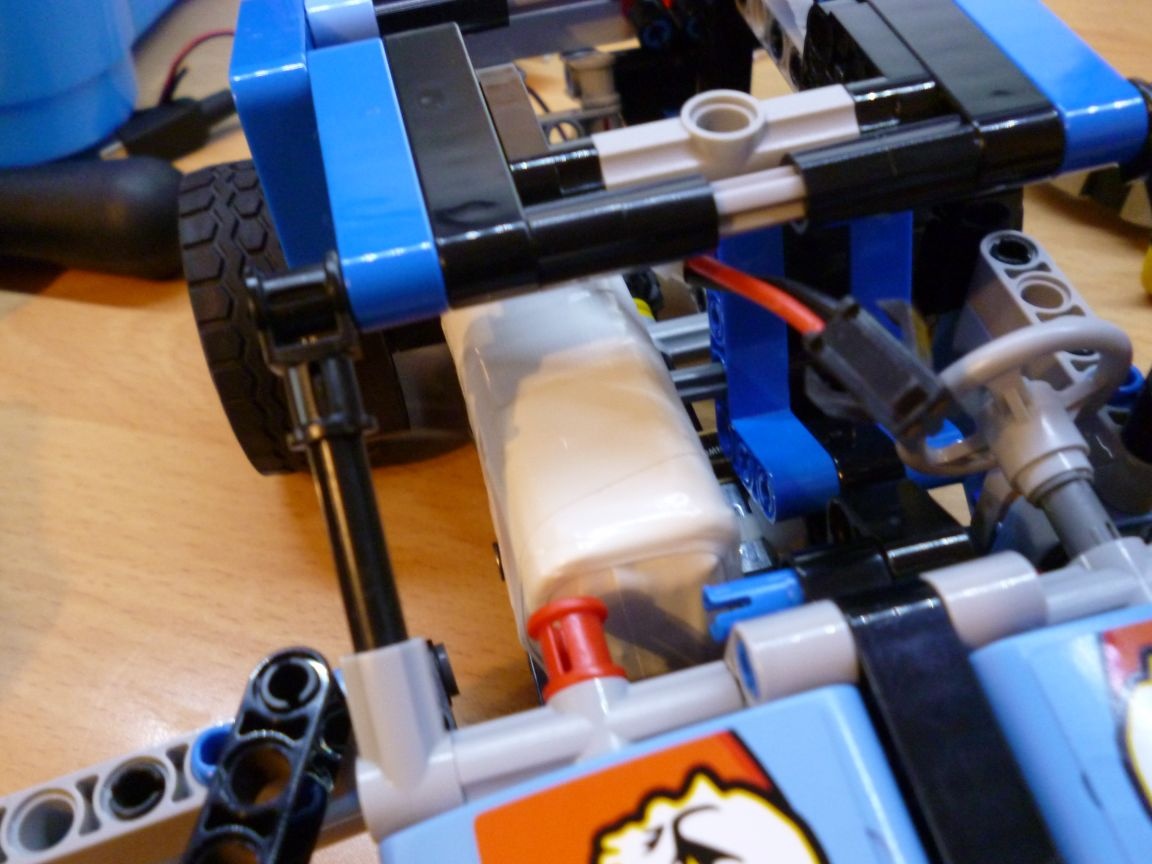
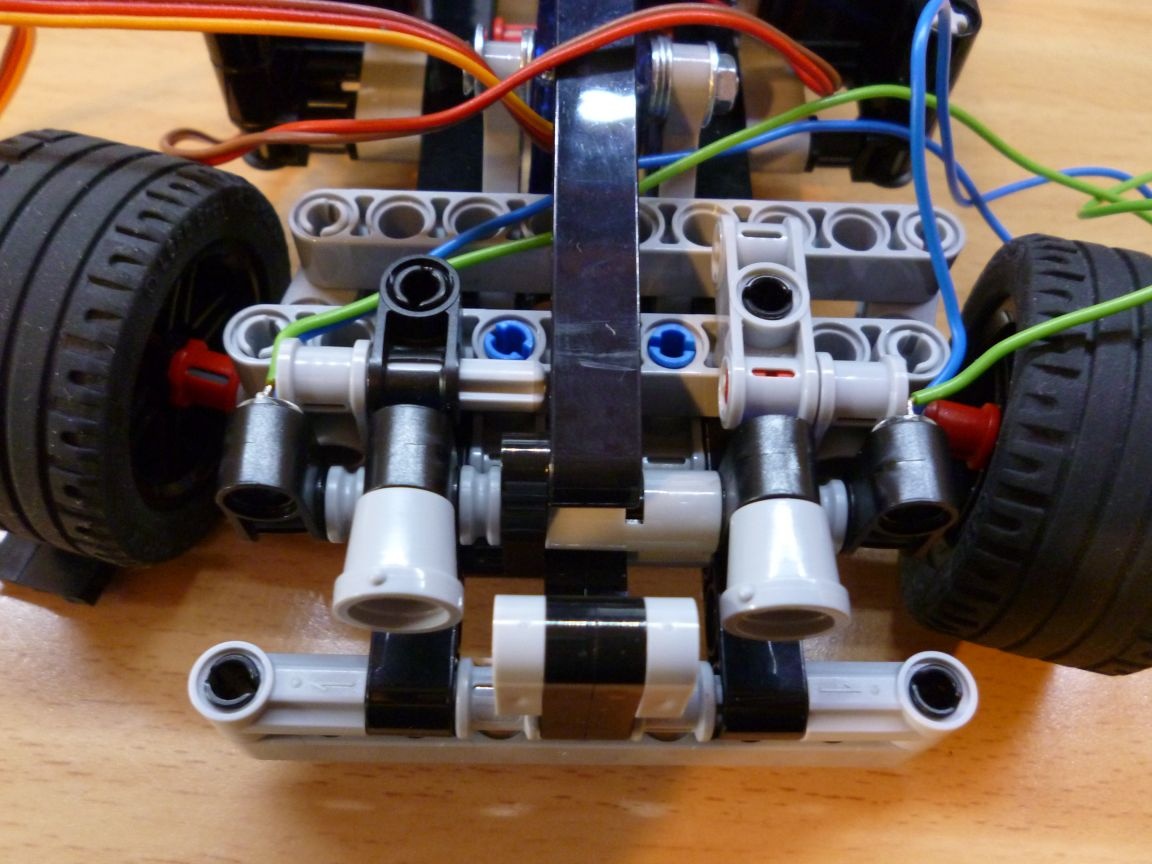
Metti in moto il nostro il modello ci sarà un motoriduttore con una velocità di 200 rpm. Può essere utilizzato con un rapporto di trasmissione diverso. Ma, secondo me, questa è l'opzione migliore. A 100 giri / min - troppo lentamente, a 300 giri / min - la potenza non è sufficiente e il motore è molto caldo. Sull'albero del motoriduttore, indossare il manicotto di collegamento "Legovskaya" e fissarlo contro la torsione della partita con un rivestimento. Per fissare il nostro motore sul modello, è necessario piegare la parte dal costruttore in metallo con la lettera "P" e fissare il motoriduttore alla piastra con un morsetto. Il risultato dovrebbe essere il seguente:
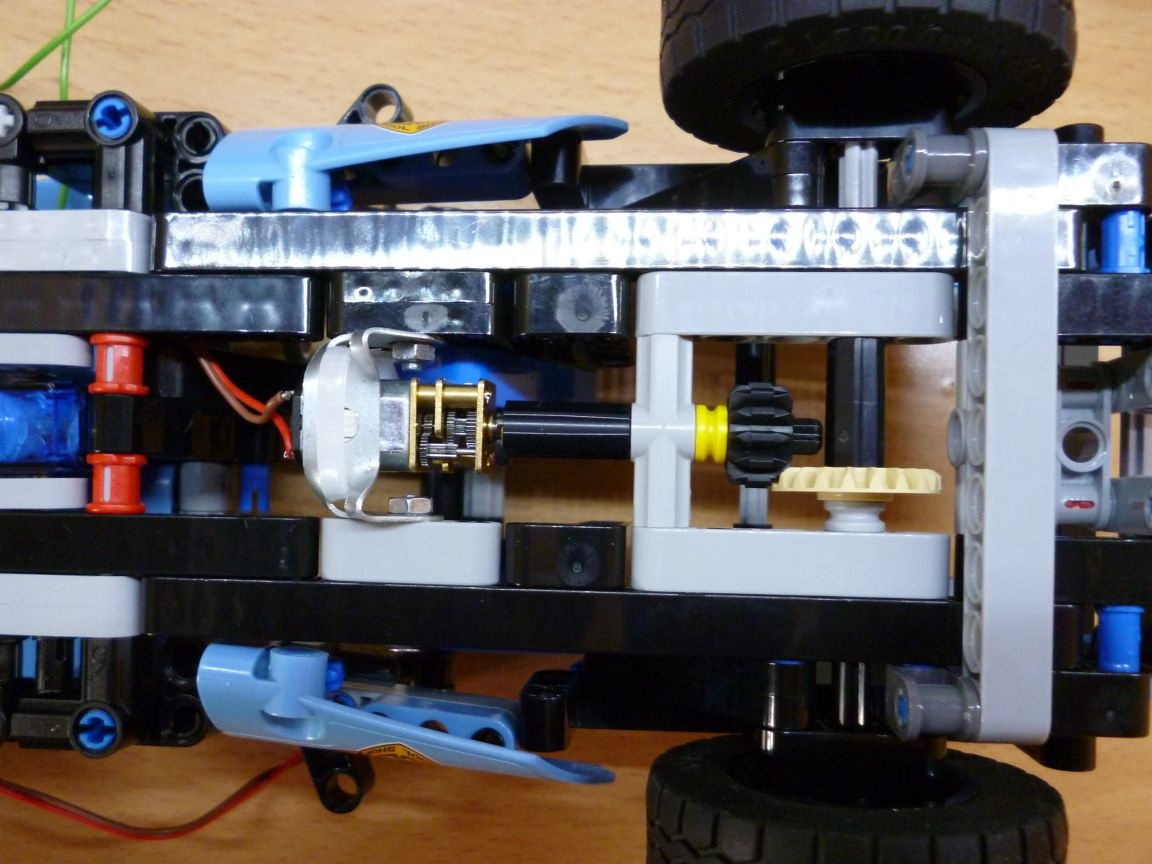
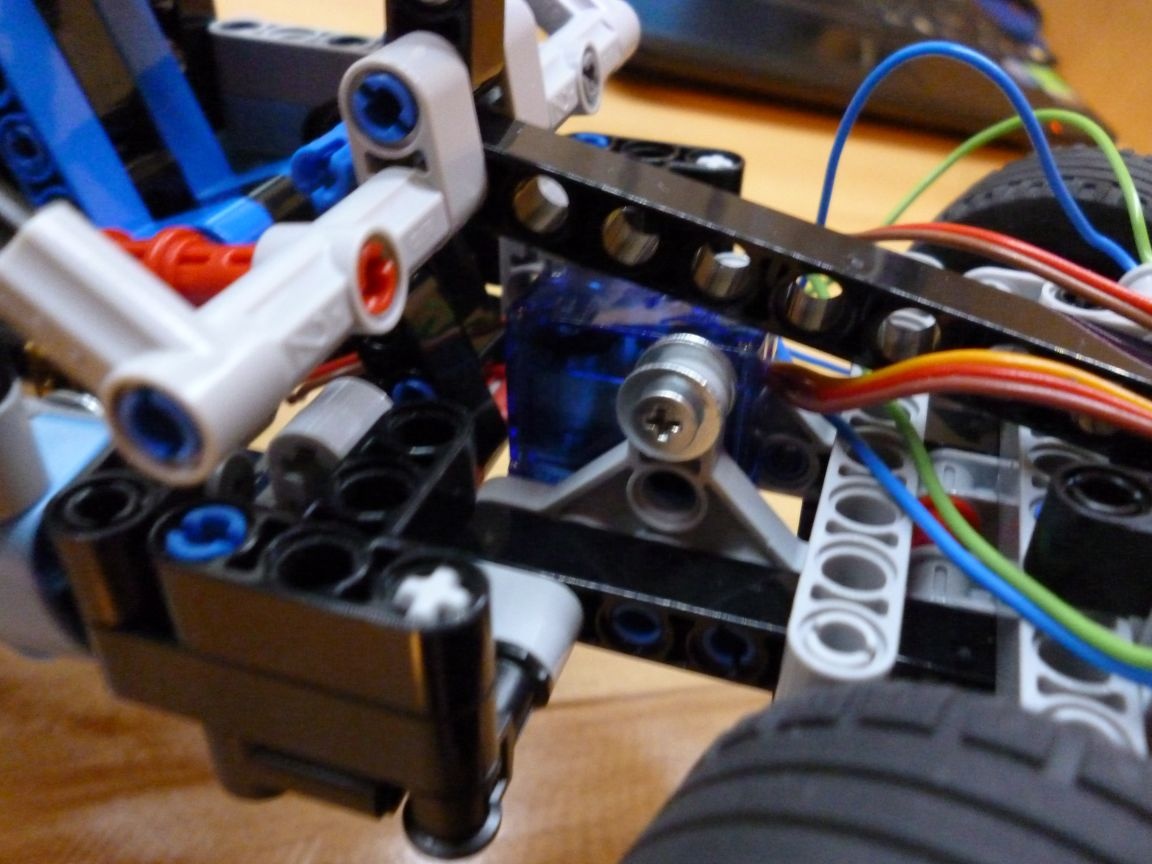
Con l'aiuto di bulloni 3x20 fissiamo il nostro motore al modello. Non stringere troppo! Altrimenti, potresti danneggiare le parti del costruttore Lego. Sul modello, si presenta così:
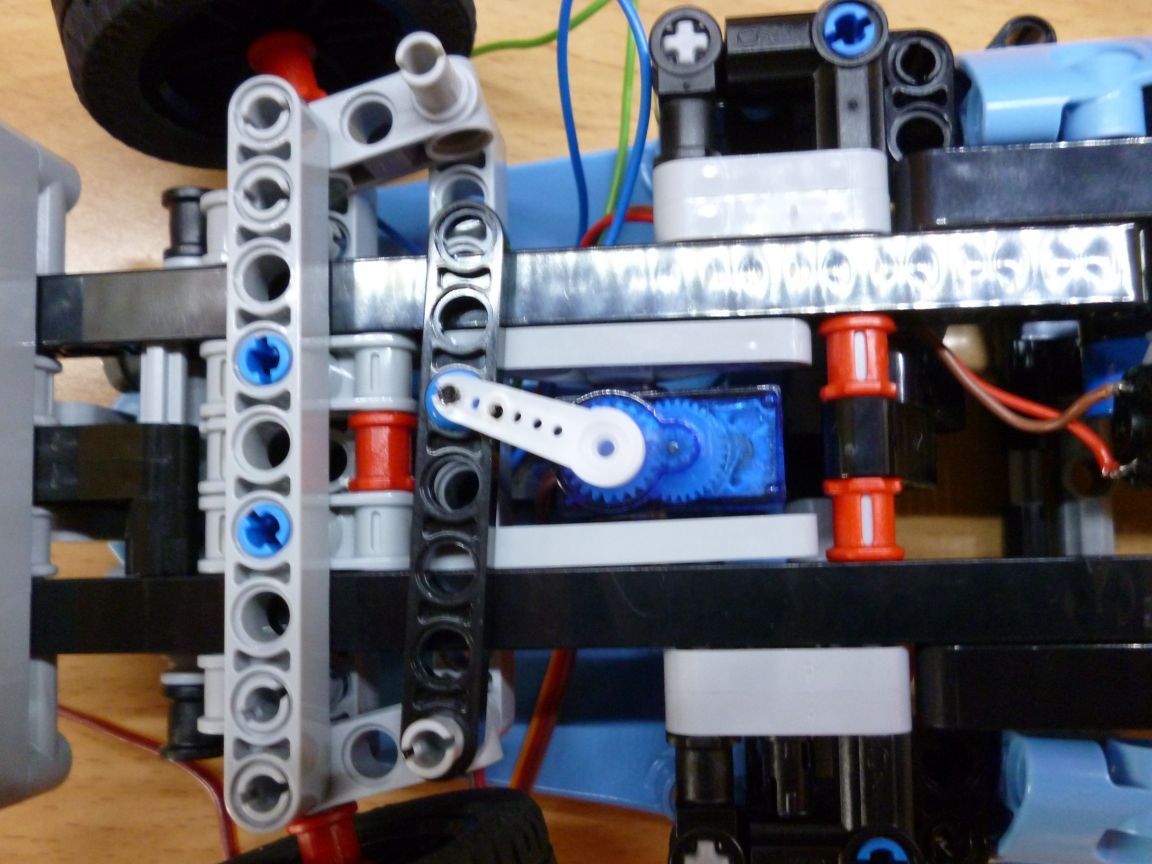
Per fare il turno, prendi un servo leggermente modificato SG-90. La custodia deve essere accuratamente perforata in modo da non toccare le parti interne, il foro passante con un diametro di 3,2 mm o semplicemente tagliare con un coltello da cancelleria.

Inseriamo un bullone nel foro realizzato e sui bordi mettiamo su piastre triangolari e fissiamo con dadi. Mettiamo la leva sull'albero del servo e fissiamo la parte alla leva Lego. Su una macchina da scrivere, assomiglia a questo:
Il passaggio 3 è un elettricista.
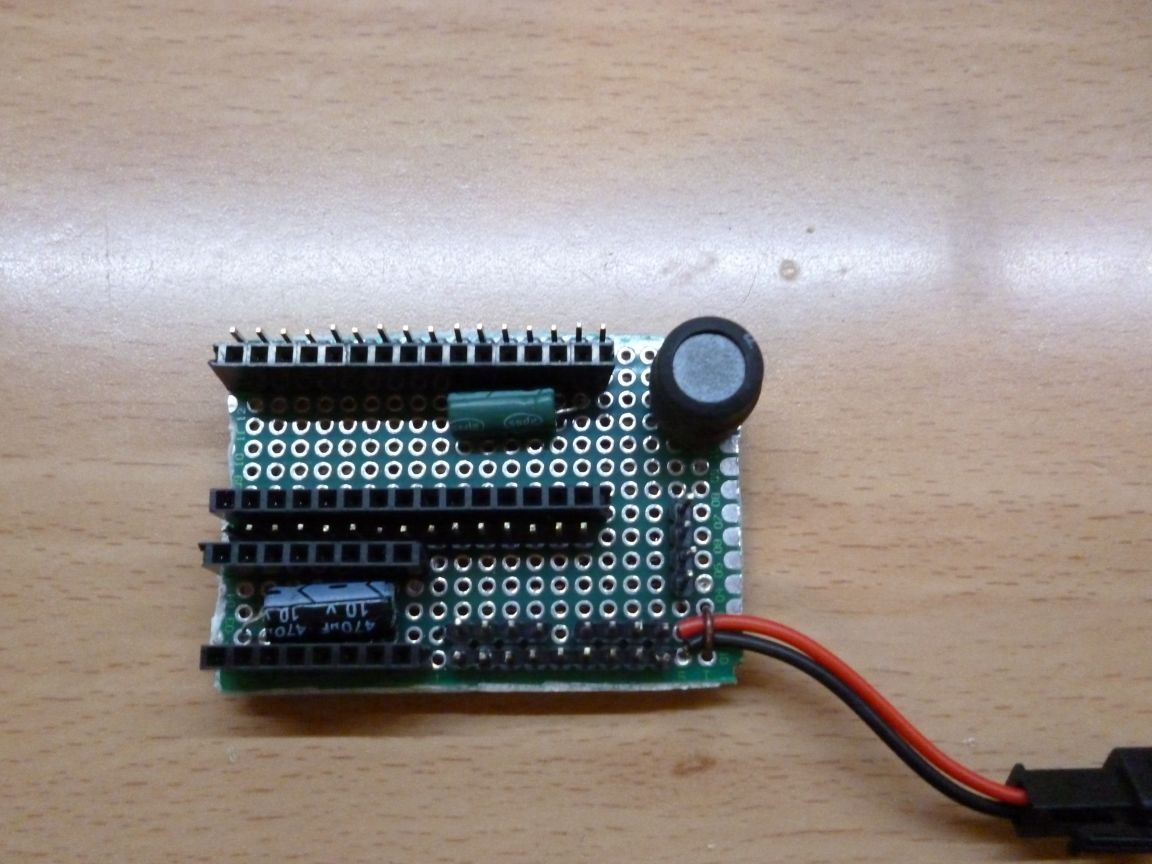
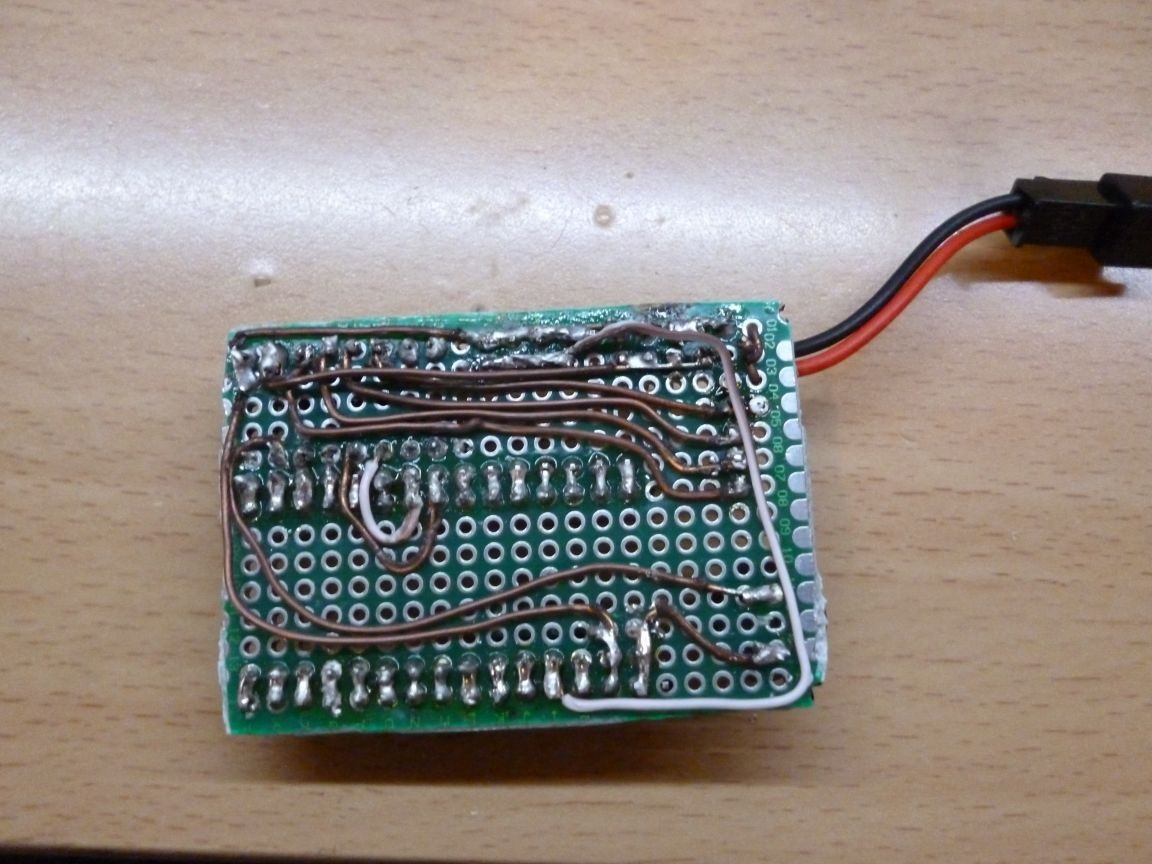
Saldatore in mano e via. Tutti i componenti elettrici possono essere assemblati semplicemente collegando i cavi di montaggio. Ma questo è scomodo, in quanto richiede molto spazio. Inoltre, esiste un'alta probabilità di contatto di scarsa qualità. Pertanto, è meglio saldare tutto sul circuito secondo il seguente schema:
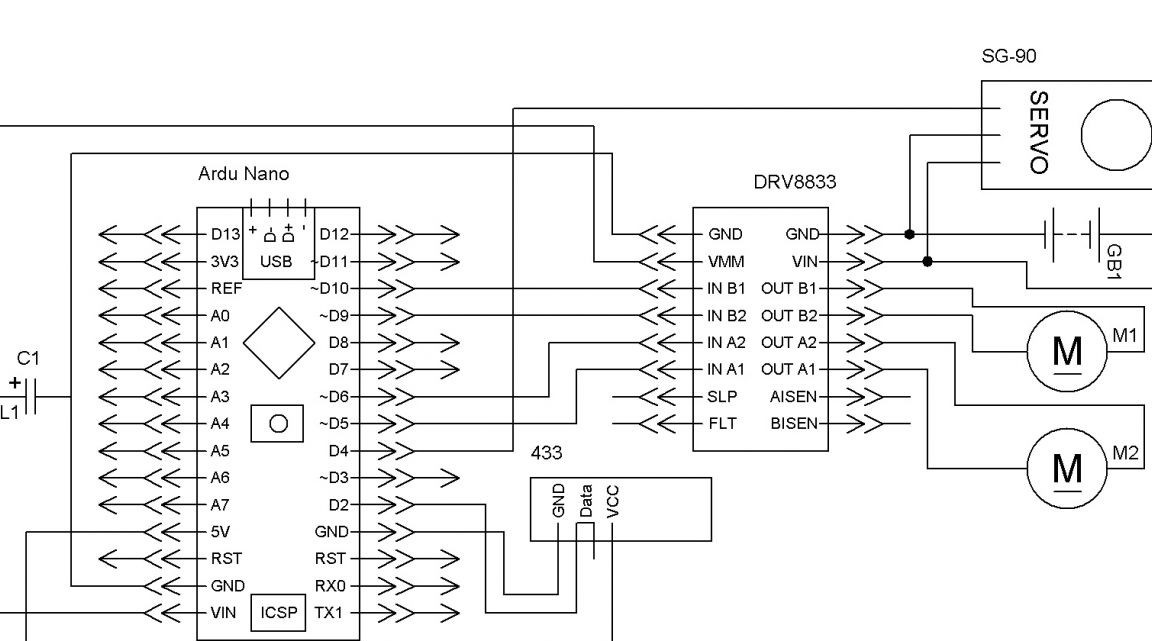
Porterò un po 'di chiarezza: puoi prendere qualsiasi condensatore a bassa potenza, puoi anche trovare un induttore di qualsiasi tipo, questo è necessario per stabilizzare la tensione del microcontrollore. L'antenna deve essere saldata al ricevitore. Ho ottenuto il seguente:
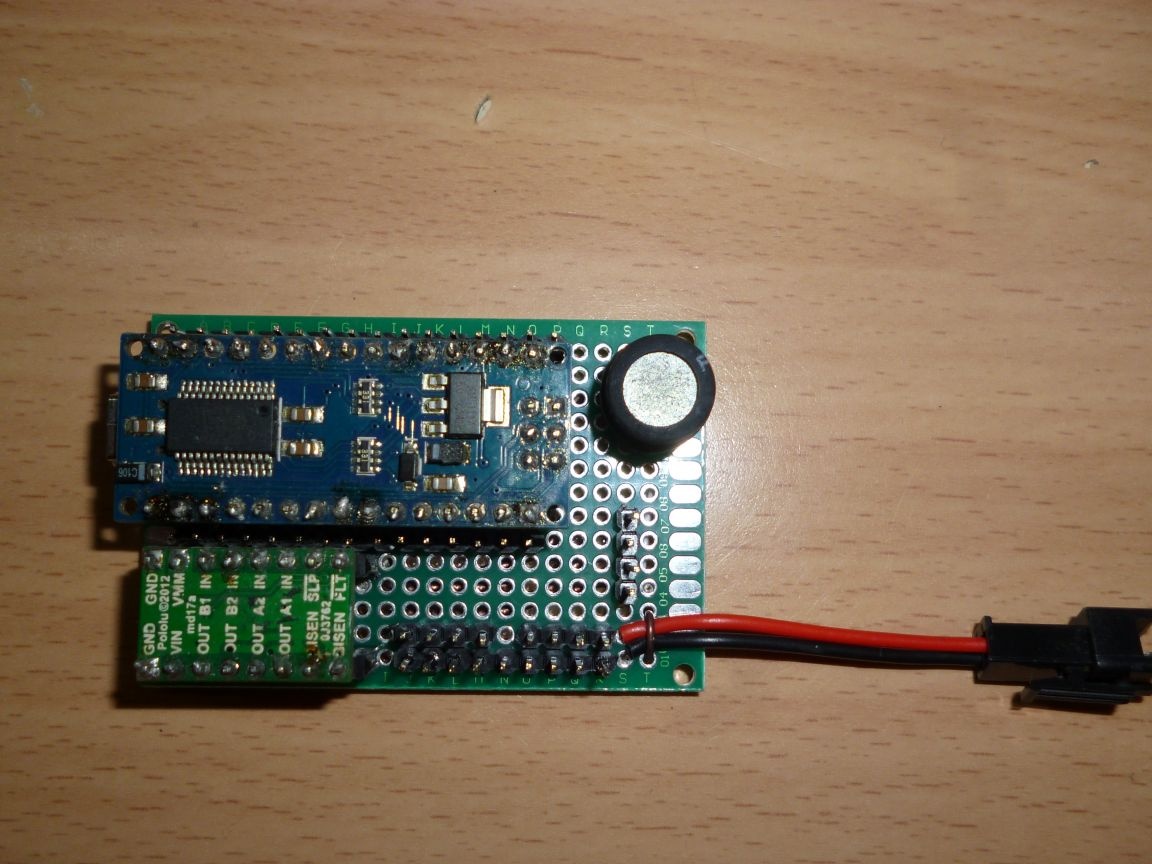
Mettiamo Arduino Nano e DRV 8833 al loro posto:
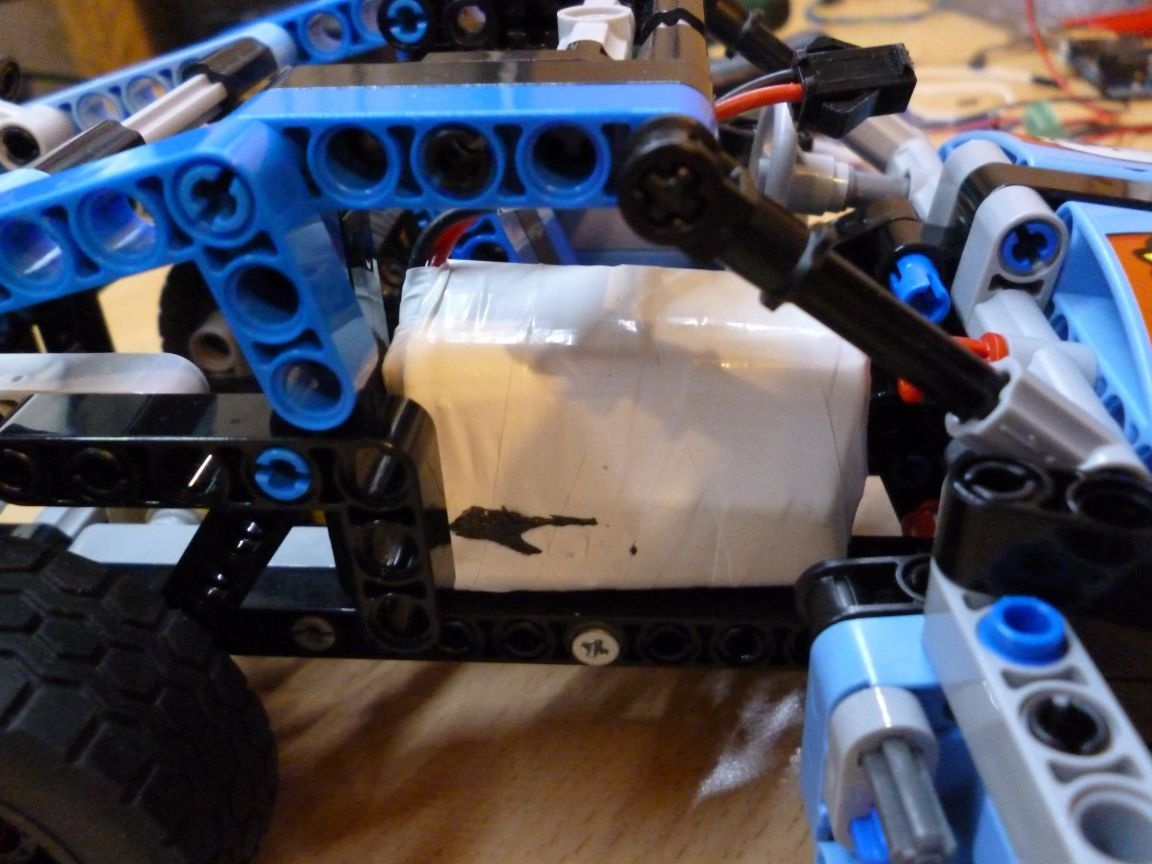
Per l'alimentazione utilizzeremo 6 batterie Ni-Mn 1.2v 1000mA, saldate in serie e avvolte con nastro isolante. Incollali su un sedile passeggero con nastro biadesivo.

Colleghiamo tutto secondo lo schema e installiamo sul retro della macchina. Puoi anche aggiungere un paio di LED. Inseriscili nei fari e collegali al pin 14 (A2).
Passo 4 firmware.
Per scrivere il firmware, ho usato l'IDE Arduino. La versione attuale al momento della scrittura è la 1.8.1. È conveniente implementare il protocollo di comunicazione usando il modulo 433 MHz usando la libreria rc-switch-2.52. Devi scaricarlo e aggiungerlo alla cartella "librerie" dell'IDE di Arduino.
Colleghiamo Arduino e lo facciamo flash con il seguente firmware:
Per testare le prestazioni del nostro modello, abbiamo bisogno di una seconda scheda Arduino. È necessario collegare un trasmettitore radio 433 MHz alla seconda scheda. Il trasmettitore è collegato come segue:
VCC (trasmettitore) a 5+ (Arduino),
Da GND a GND,
DATI a D10.
Scrivi lì lo schizzo SendDemo modificato. È negli esempi nella libreria che abbiamo installato e serve per inviare comandi. Prima di eseguire il flashing dello schizzo, è necessario modificarlo leggermente, ovvero modificare i comandi trasmessi. A seconda di ciò che è necessario controllare, scrivere i seguenti comandi nella riga di invio:
“1” - movimento in avanti (scrivi un comando senza virgolette!)
"2" - movimento all'indietro
"15" - punto
"3" - girare il volante verso sinistra
"4" - girare il volante verso destra
"5" - imposta il volante al centro
"10" - accendi i fari
"11" - spegni i fari
Fare un telecomando con un trasmettitore radio a 433 MHz è un argomento per un articolo separato. Scriverò sicuramente le istruzioni per la fabbricazione di un tale telecomando.
Voglio dire che questa opzione è adatta a quasi tutti i modelli di auto Lego. È sufficiente collegare tutti i meccanici e trovare un posto per la scheda. E se includi la fantasia, puoi meccanizzare qualsiasi modello.